4-RRRPP 并联机构工作空间解析分析
2020-08-17罗建国赵韵秋邱杰清
罗建国 ,赵韵秋 ,邱杰清
(1.华北科技学院机电工程学院,河北 三河 065201;2.河北省矿山设备安全检测重点实验室,河北 三河 065201;3.华北科技学院研究生院,河北 三河 065201)
1 引言
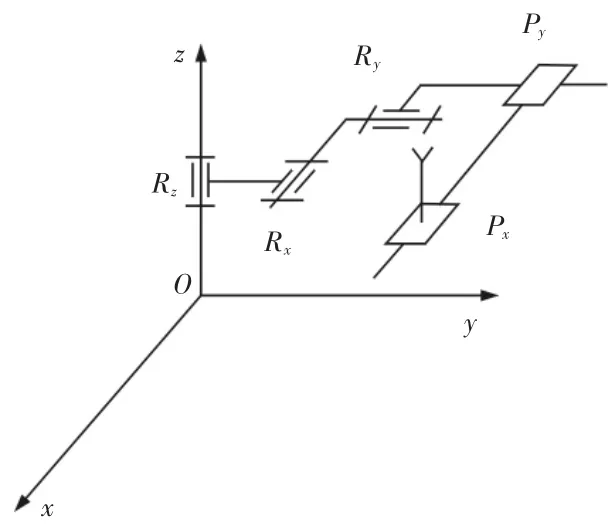
机器人工作空间是机器人结构设计、轨迹规划及运动控制中一个非常重要的问题。串联开链机器人工作空间求解比较成熟[1-3],而在并联机器人的工作空间求解方法中,常用解析法和数值法两种方法。解析法中的几何法[4]最有特点,它是考虑杆长极限因素的基础上,机构在固定姿态下,并联机构的工作空间可以看成几个球面空间求交问题的一种方法。国内外有很多学者基于几何法[5-8]求得了并联机构的工作空间,该方法的优点是可以规避复杂的数学计算,当前的缺点是不适合程序化。数值法是通过分析并联机构运动学正解或反解[9-12]来求取其工作空间的方法,其本质是搜索法。利用解析法求解并联机构工作空间的一般过程是:将并联机构分解成多个开环串联支链求各部分的工作空间,再将各支链部分工作空间求交,从而得到并联机构的工作空间。2000 年,文献[13]利用AutoCAD 平台对并联机构进行了定位姿下的工作空间研究,得到组成工作空间的六个曲面;2007 年,文献[14]对5 轴并联机构工作空间的形成机理进行了研究;2013 年,文献[15]加约束从动支链的构型演变方法得到一类2T2R(两个移动和两个转动)4 自由度并联机构。引入敏感度概念,利用数值法解得了位置工作空间大小和姿态工作空间范围与机构尺度参数之间的关系,为机构尺度参数的选取提供了依据。2015 年,文献[16]提出了一种量化六自由度并联机构工作空间的六维空间超椭球体的计算方法,该方法的计算过程包括二维包络椭圆的求解和六维超椭球体的计算两部分。2018 年,文献[17]利用操作空间和驱动空间的速度转换和力转换约束、Jacobian 矩阵条件数均值和极差的逆向分析确定了并联机构的加工区域。2019 年,文献[18]对平面串联两杆机构的一种构型进行参数优化求解和实验验证,结果表明参数优化后的构型可以保证预期轨迹在力旋量可行工作空间内,解析法可以准确地推导出力旋量封闭工作空间的边界。文献[19]应用CAD 变量几何法求解多种并联机构的工作空间。近年在并联机构工作空间方面,国内外学者主要研究动平台姿态角确定时,分析输出参考点的位置工作空间。然而在给定动平台参考点的位置,分析动平台姿态工作空间方面的研究却比较少。以作为研究对象,如图1 所示。提出把并联机构分解成串联支链,如图2 所示。
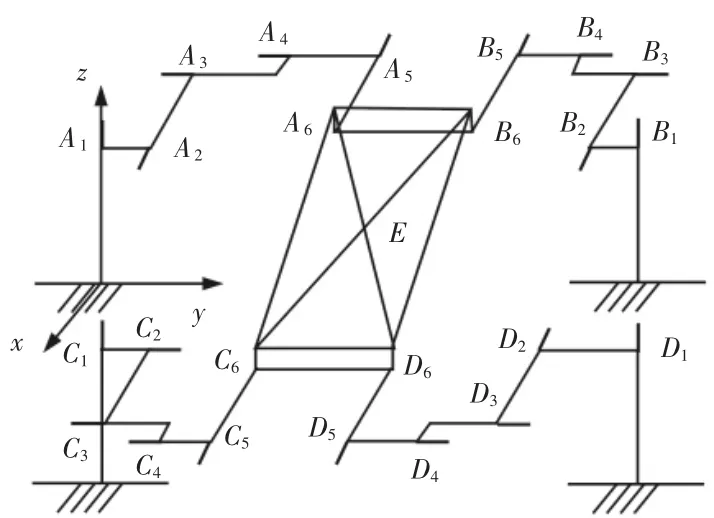
图1 4-RzRxRyPyPx 并联机构简图及坐标系Fig.1 4-RzRxRyPyPx Parallel Mechanism Diagram and Coordinate System
然后把串联支链从输出末端到固定端以关节插件形式逆向组装,将每一次组装后得到的关节或串联机构的末端工作空间运动能力的空间几何形体作为母线/母体/母面,以组装关节轴线为基线,按照关节运动约束条件构建新的支链末端工作空间运动能力母线/母体/母面,依次推进,直到完成以支链固定关节所在轴线为基线获得整个支链末端工作空间运动能力域。依据前面逆向综合解析作图得到的各支链末端工作空间的运动域结果,按照各支链在固定坐标系下并联机构静平台中的空间位置进行安置,求取其交集,从而得到并联机构输出末端参考点的可到工作空间的结果。
2 支链运动能力逆向综合
并联机构的输出末端的工作空间是由分解成的各串联支链末端工作空间的综合交集得到的,各串联支链的末端工作空间取决于组成支链的各关节运动能力的综合并集。
为方便描述并联机构工作空间求取过程中的影响因素,分别给出关节运动能力、串联支链运动能力、并联机构运动能力三个概念。
(1)关节运动能力:Sij=Kij(nij,Lij,φij),其中,Kij—受多个变量影响的空间几何曲线或实体;nij—关节轴线空间向量(可以3个方向余弦表示);Lij—关节构造参数(如连杆长度)或移动副运动长度区间;φij—转动关节运动角度区间。
把串联支链从输出末端到固定端以关节插件形式逆向组装,将每一次组装后得到的关节或串联机构的末端工作空间运动能力的空间几何形体作为母线/母体/母面,以组装关节轴线为基线,按照关节运动约束条件构建新的支链末端工作空间运动能力母线/母体/母面,依次推进,直到完成以支链固定关节所在轴线为基线获得整个支链末端工作空间运动能力域。
假设一串联支链具有个n 运动关节,其运动域逆向综合的一般过程为:以关节i 为基点,以关节i 所在轴线为基线,以连杆i+1、i+2、i+3……、n 运动域曲线、曲面、实体为第n-i 阶母线、母面、母体,按照新的平移或旋转操作后得到的最新曲线、曲面、实体作为第n-(i-1)阶母线、母面、母体,以关节i-1 为基点,以关节i-1 所在轴线为基线,按照新的平移或旋转操作后得到的最新曲线、曲面、实体作为第n-(i-2)阶母线、母面、母体,依照此规律不断继续向以关节1 为基点,以关节1 所在轴线为基线,按照新的平移或旋转操作后得到的最新曲线、曲面、实体作为n-n=0 支链或机构的空间运动域。

表1 一般串联机构逆向综合基本信息对应表Tab.1 General Series Mechanism Inverse Synthesis Basic Information Correspondence Table
针对图1 所示的串联支链,各关节及其轴线基本信息,如图3 所示。支链上的基点、基线,如图4 所示。支链逆向组装的过程,如表2 所示。对应的把末端关节向基础关节方向以拼积木的形式逐一组装得到整条完整支链,并把每一次组装后机构的末端运动能力进行解析绘图,从而得到整条支链的输出末端工作空间所对应的运动域。
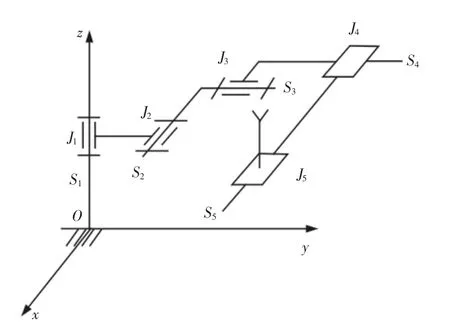
图3 串联支链关节、轴线基本信息Fig.3 Series Branch,Axis Aasic Information

图4 串联支链逆向综合基点、基线基本信息Fig.4 Series Branch Inverse Synthesis Basepoint,Baseline Basic Information

表2 串联支链逆向综合过程信息表Tab.2 Series Branch Inverse Synthesis Process Information Table
3 4-RRRPP 并联机构工作空间分析
随着科技的发展,近些年来计算机仿真技术迅速发展,它是一种伴随计算机发展起来的先进技术,可机构的结构、运动学、动力学特性进行绘图和仿真分析,借助空间三维CAD 技术和解析分析方法,研究并联机构工作空间特性,并通过改变动平台尺寸、静平台尺寸参数,找其变化与工作空间变化之间的规律和关系。并联机构的输出末端工作空间的影响因素,如图5 所示。

图5 并联机构运动能力影响因素关系图Fig.5 Relationship Diagram of Factors Affecting the Movement Capacity of Parallel Mechanism
假设图1 和图2 所示机构各参数的值如下:
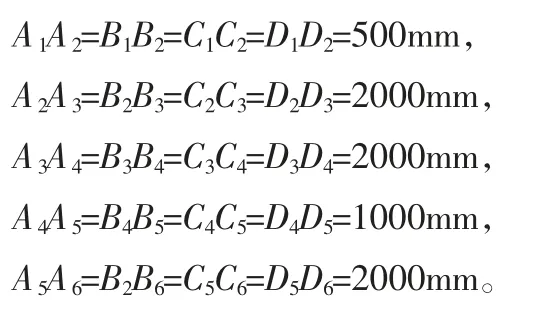
并联机构工作空间的解析绘图求解过程:建立以固定铰点为原点的各支链坐标系,确定动平台构型与尺寸,末端输出点确定,各关节参数确定,关节运动能力解析绘图,支链运动能力逆向解析绘图综合,建立并联机构固定坐标系,确定固定平台构型与尺寸,以固定平台各关节铰点为中心重置各对应支链运动能力空间曲线、曲面或实体,对各支链运动念能力空间曲线、曲面或实体求取交集,得到并联机构工作空间。当并联机构各支链末端关节距动平台形心849mm 时,其他尺寸保持不变,并联机构输出末端工作间结果,如表3 所示。当改变并联机构静平台尺寸保持不变,动平台各关节距离其形心的尺寸参数发生改变时间,并联机构输出末端工作空间形状相似,但体积大小随着距离的增大而减小。
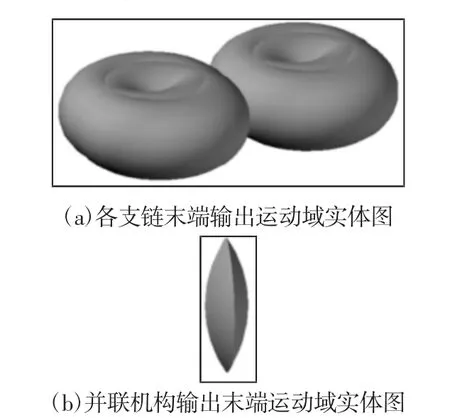
图6 A5E=B5E=C5E=D5E=849mm 时并联机构末端运动域Fig.6 Parallel Mechanism End Motion Domain when A5E=B5E=C5E=D5E=849mm

图7 支链末端与动平台形心之间的距离对运动域实体体积的影响Fig.7 The Influence of the Distance Between the End of the Branch and the Centroid of the Moving Platform on the Volume of the Moving Domain
当并联机构静平台各关节固定点之间距离为6000mm 时,其他尺寸保持不变,并联机构输出末端工作间结果。
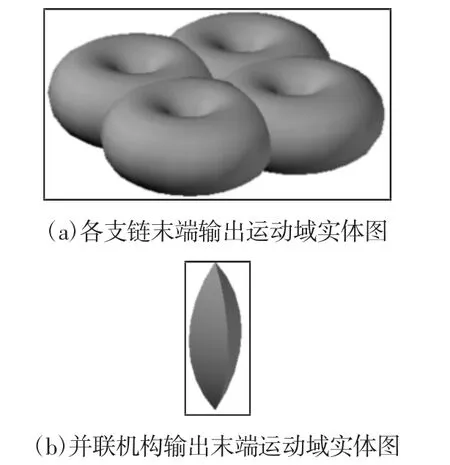
图8 A1B1=B1C1=C1D1=6000mm 时并联机构末端运动域Fig.8 Parallel Mechanism End Motion Domain when A1B1=B1C1=C1D1=6000mm
当改变并联机构动平台尺寸保持不变,静平台各关节距离其形心的尺寸参数发生改变时间,并联机构输出末端工作空间形状也发生改变,体积随着距离的增大而减小,如表3 所示。

表3 静平台各关节固定点距离变化时末端输出运动域综合结果Tab.3 The Comprehensive Result of the End Output Motion Domain when the Fixed Point Distance of Each Joint of the Static Platform Changes
4 结论
通过对串联机构、并联机构工作空间分析方法的梳理,提出一种基于支链关节运动能力逆向综合的解析作图分析新方法,并以机构作为实例,得出如下研究结论:
(1)并联机构分解成串联支链,然后把串联支链从输出末端到固定端以关节插件形式逆向组装,将每一次组装后得到的关节或串联机构的末端工作空间运动能力的空间几何形体作为母线/母体/母面,以组装关节轴线为基线,借助三维CAD 软件工具,得到整个支链末端工作空间运动能力域,并给出其一般方法和步骤。
(2)将各支链末端工作空间运动能力域在固定坐标系下的空间位置进行重置,求取其交集,从而得到并联机构输出末端参考点的可到工作空间的结果。
(3)当改变并联机构静平台尺寸保持不变,动平台各关节距离其形心的尺寸参数发生改变时,并联机构输出末端工作空间形状相似,但体积大小随着距离的增大而减小。
(4)当改变并联机构动平台尺寸保持不变,静平台各关节距离其形心的尺寸参数发生改变时,并联机构输出末端工作空间形状也发生改变,体积随着距离的增大而减小。
