仿蝼蛄运动特性的土壤挖掘机构设计
2020-08-17张峻霞张凯凯朱曰莹
张峻霞,张凯凯,张 琰,朱曰莹
(天津科技大学机械工程学院,天津 300222)
1 引言
机构的优化设计有助于提升机械系统的性能,达到提高效率、减阻、减磨的效果。常见的机构优化设计方法包括:杆组法、“图论”理论[1]、多自由度机构设计[2]、多链接机构设计[3]等。可按照设计顺序分为2 种:(1)在已知机构基础上进行结构或参数的优化设计;(2)根据已知的运动轨迹和运动特性,设计满足要求的机构[4-5]。仿生机构设计主要借鉴生物体的运动轨迹或运动特性,利用连杆、齿轮、弹簧等零件的组合实现其特有的生物功能,并达到优化的目的,如仿蝗虫的间歇式弹跳机器人[6]、跳跃机器人[7],仿鱼尾鳍运动规律的推进器并联机构[8]等。基于生物运动学轨迹或运动特性的仿生机构设计经过了数百万年的进化及优化。
蝼蛄是一种典型的土栖昆虫,能够在地下实现高效快速掘进,其生物功能的实现不仅与其前足特化的结构材料有关,而且也与其挖掘足(前足)的“挖-扩式”掘进运动方式有关[9]。以仿生机构设计方法为指导,通过分析、模仿蝼蛄挖掘运动原理,设计仿生触土挖掘机构。通过机构仿真实验进行特征符合度检验。
2 方法
2.1 挖掘运动捕捉
蝼蛄前足挖掘轨迹采集系统,如图1 所示。该系统由高速摄像机、厚度可调的透明容器(内装透明介质)、照明系统3 个部分组成。高速摄像机(Phantom v5.1,Vision Research,USA)的最大拍摄速率为 1000fps/s,最大图像分辨率为(1024×1024)pixel;透明容器尺寸为(200×200)mm(长×宽),其厚度调整范围为(8~15)mm,其正反两面均为透光性好、平整、无波纹和沙眼的石英玻璃。根据预试验结果,蝼蛄体宽约0.7cm,其两前足在挖掘时最大展开宽度约1cm,故将容器的厚度设置为10mm。照明系统采用GREE Q5 白光LED 作为光源,功率5 W。
蝼蛄的生存环境土壤是非透明介质,为了便于精确采集蝼蛄前足的挖掘运动,本研究使用一种以海藻酸钠为主要原料的透明凝胶介质代替土壤,这种介质具有以下2 个特点:有良好的均一性和透明度;硬度与易破碎性能与土壤相近。
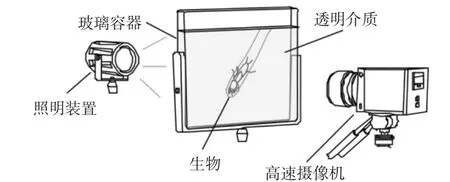
图1 蝼蛄挖掘运动的数据采集系统Fig.1 The Excavating Motion Capturing System
2.2 数据处理
将采集得到的蝼蛄挖掘运动影像进行筛选,选出5 段包含前足连续伸展和收回完整运动的录像进行数据处理。首先,按帧将视频转换为图像序列;然后,将转换出的运动图片序列导入到运动分析软件Didge 中,得到各运动循环中特征位置的连续坐标信息;最后,将获得的坐标数据导入Matlab 软件,得出所有数据点随时间变化的运动速度及加速度并生成相应的运动轨迹曲线。
根据数据处理所得的蝼蛄前足挖掘运动规律以及曲柄滑块机构设计原理,选定机构设计方案,由轨迹、速度和加速度三因素约束法对机构各参数进行调整[10],得出机构各参数。并通过机构仿真实验,对各参数的生物特征符合度进行检验。
3 结论
3.1 蝼蛄前足挖掘规律
3.1.1 挖掘轨迹
生物运动轨迹通常非光滑曲线,这多由于生物运动的不稳定性以及人工数据采集产生的误差,但其仍然可以呈现生物运动趋势及特征。蝼蛄前足挖掘轨迹,如图2 所示。实线表示蝼蛄左前爪尖端的挖掘轨迹曲线,虚线表示拟合曲线。

图2 蝼蛄挖掘轨迹及拟合曲线Fig.2 Excavation Trajectory of the Foreleg of a Mole Cricket
蝼蛄前足挖掘运动过程可分为三个阶段,如图2 所示。首先,前足向前伸展并楔入土壤(A-B);此后,前足在水平面内向侧前方展开,将身体前部的土壤推向两侧并压实(B-D),其中B-C 段为足在X、Y 两个方向的伸展,C-D 段为X 方向伸展,Y 方向收回;最后,前足收回至初始位置(D-A)。
前足侧向展开运动阶段(B-D)发生了扩张与伸展两种动作,拟合结果为

3.1.2 速度分析
由于图像序列的每张图片时间间隔一致,可通过分析蝼蛄前足各时间点所在位置关系得出挖掘速度。蝼蛄前足挖掘运动速度曲线,如图3 所示。其中实线为真实挖掘轨迹,虚线为拟合轨迹。蝼蛄前足在挖掘时,横向的扩张动作发生在X 方向,而向前掘进动作发生在Y 方向。因此,X 方向主要考虑的参数为平均值,最大值,最小值及拐点位置,如图3(a)所示。考察的是蝼蛄左侧前足,因此挖掘过程中速度为负值。挖掘扩张过程中,(0~0.05)s内速度快速增加至最大速度4.8mm/s,之后快速减小至2mm/s,此阶段速度变化较为明显,原因是由于在挖掘动作初始阶段,土壤还未压实,爪趾受到的切削阻力较小;(0.05~0.3)s,速度有降低趋势;(0.3~0.5)s 速度变化不大,约 1mm/s,爪趾表现为较稳定的扩张状态。

图3 挖掘速度曲线Fig.3 Change of Excavating Speed During Excavation
Y 方向上速度变化表示挖掘运动是处于向前挖掘、保持位置还是处于向后回退的挖掘状态。根据Y 方向速度曲线,可以发现挖掘过程初始阶段速度最大,达到6.6mm/s,然后在0.05s 内迅速减小至-1.5mm/s,说明在挖掘开始时,需要有快速向前挖掘动作,以保证生物体在挖掘过程中有逐渐向前移动的空间。随着阻力逐渐增大,运动速度开始下降;(0.05~0.3)s,速度有较大波动,达到另一个峰值3mm/s,是为了进一步完善第一阶段挖掘成果;(0.3~0.5)s,Y 方向挖掘速度保持在-0.5mm/s 上下波动。
3.1.3 加速度分析
蝼蛄前足挖掘过程中,除开始及结尾阶段出现大幅波动外,平均加速度基本平稳,如图4 所示。根据X 方向加速度曲线(图4a),在(0~0.05)s 加速度有大幅度波动,原因是挖掘初始阶段需要较大初始加速度,以提供较大扩张力,且为了适应土壤阻力及生物自身肌肉力,会引起加速度的较大波动;(0.45~0.5)s,由于扩张动作即将结束,X 方向速度降为0,加速度为较大的负值。
根据 Y 方向加速度变化曲线(图4b),在(0~0.02)s,加速度波动明显,加速度开始时为负值且绝对值最大达到645mm/s2,此阶段是生物为了克服土壤阻力速度持续减小阶段;在(0.02~0.13)s,加速度波动明显,这是为了给爪趾挖掘提供挖掘力,对所受土壤冲击做出适应性调整。

图4 挖掘加速度曲线Fig.4 Change of Acceleration During Excavation
3.2 机构及运动学分析
本机构在曲柄及滑块机构的基础上做了综合及变形,机构示意图,如图5 所示。其中:CE 为滑轨。
机构独立设计参数有 l1,l2,l3,δ,l 和 ε,此机构由电机驱动。因此θ1随时间稳定变化。
β 为非独立设计参数,其大小:

式中:β—杆BC 与滑轨CE 之间所夹锐角;
ε—滑轨CE 与水平方向的夹角74°;
α—杆BC 与水平方向的夹角。
点A 为坐标原点,由已知参数可以求出B 点坐标为:


图5 机构示意图Fig.5 The Diagram of the Crank Slider Mechanism
式中:xA、xB、yA、yB—A、B 两点的横纵坐标;
l1—AB 的长度;
θ1—杆AB 与水平方向的夹角。
由式(1)~式(2)可得出 C 点坐标为:

式中:xB、xC、yB、yC—B、C 两点的横纵坐标;
l2—BC 的长度;
α—杆BC 与水平方向的夹角。

式中:l—机架上AE 两点间的距离。
显然式(3)中表示C 点纵坐标与(4)式中C 点纵坐标应一致,可联立方程得出:

其中,U(θ1)=[lsinε+(1-sinε)cosθ1]/l2;φ=arctan(sinε/l)。
α 是关于转角θ1的函数。由此可知除独立参数外β 以及α均与变量θ1相关。
由与B 点的位置关系还可得出D 点的坐标位置:

式中:δ—杆BC 与BD 之间的夹角;
xD、yD—D 点横纵坐标。
4 仿真分析与验证
4.1 位移分析
根据已知机构简图,采用实验及误差排除法确定机构参数分别为 l1=11.18mm,l2=25mm,l3=68.67mm,l=12.48mm,其中 l1为直接由电机驱动的曲柄结构,满足曲柄存在条件[11]并沿顺时针方向转动。机构D 点运动轨迹及生物前足足端运动轨迹对比,如图6 所示。由于生物体积过小,机构设计曲线以蝼蛄前足挖掘轨迹(图2 虚线)扩大300 倍为基准。机构工作曲线与蝼蛄挖掘运动轨迹拟合曲线重合度较好(图6 所示),可以证明设计机构能够有效模拟生物挖掘运动轨迹。此机构的三个关键位置,如图7 所示。图7(a)为机构挖掘动作起始位置,曲柄AB 移动至水平位置,机构端点D 开始明显受力。图7(b)位置为机构由挖掘到扩张的过渡位置,曲柄AB 与BD 共线,此时机构向前完全伸展,并从下一时刻开始横向伸展。下一位置图7(c)机构完全收缩,曲柄AB 与连杆BC 共线,AC 距离达到最小,此时机构横向扩张最大,D 点到达挖掘运动末端即有效挖掘动作结束。
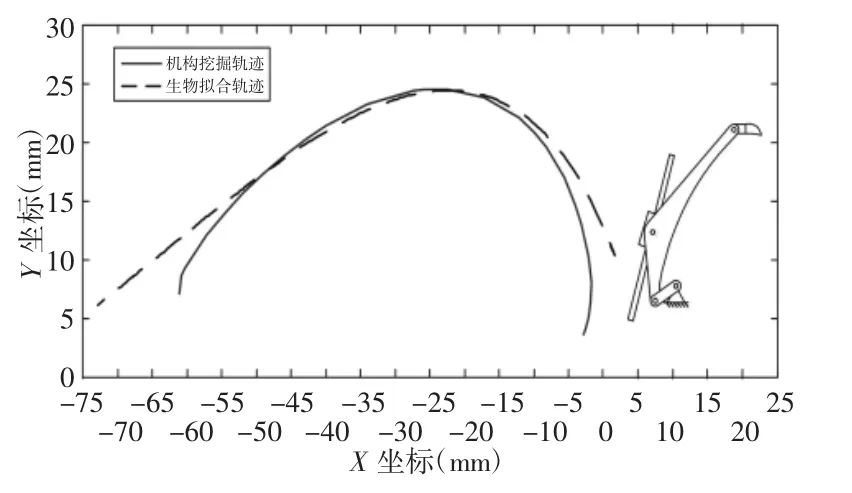
图6 机构运动轨迹Fig.6 The Motion Trajectory of the Mechanism

图7 机构运动特殊位置Fig.7 Three Key Positions of the Mechanism
4.2 速度分析
机构末端沿X 方向运动速度变化曲线,如图8 所示。在(0~1)s 时间段内实际扩张运动还未发生,速度为负。在(1~2)s 内,速度快速增加,并在2.27s 达到最大值37m/s,其对应机构运动位置如图所示。在2.27s 之后,速度平稳下降,直至扩张动作结束,速度降为零。X 方向速度曲线的变化趋势与生物挖掘速度相似。

图8 X 方向速度曲线及最大速度对应位置Fig.8 The Velocity Curve in X Direction
机构末端沿Y 方向运动速度变化曲线,如图9 所示。(0~1.86)s 时间段内,速度平稳增加,由0mm/s 增加至最大挖掘速度22m/s,最大速度对应机构运动位置如图所示;蝼蛄前足挖掘初始时刻挖掘速度最大图3(b)这对于由电机带动的挖掘机构而言是难以实现的。挖掘速度有突变,有助于对土壤产生大的冲击,利于挖掘。在(1.86~3.40)s 间挖掘速度快速减小直至为负,此时挖掘动作结束,机构处于 Y 向回退阶段。此特征与图3(b)(0~0.15s)生物达到最大挖掘速度后速度变化趋势一致。

图9 Y 方向速度曲线及最大速度对应位置Fig.9 The Velocity Curve in Y Direction
4.3 加速度分析
机构末端沿X 方向运动加速度曲线,如图10 所示。机构运动过程中尖端加速度方向、大小可反映机构尖端施力情况。加速度值在1.52 秒之前平缓增加,表明机构尖端位置提供的挖掘力逐渐增大。在(1.52~1.92)s 时间内扩张加速度快速增加,在短时间内达到最大值8.6×107mm/s2,1.92s 后加速度快速减小。因此1.92s 时机构尖端压力最大。机构特征位置,如图10(b)所示。A、B、C 三点分别为1.52s,1.92s 及 2.27s 机构尖端对应位置。在(1.92~3.28)s 内,X 反向加速度为负,速度平稳下降,如图8 所示。3.28s 后加速度突变,对应机构尖端运动至最右端,机构与土壤接触发生较大冲击。

图10 X 方向加速度曲线及最大加速度对应位置Fig.10 The Acceleration Curve in X Direction
机构末端沿Y 方向加速度曲线,如图11 所示,加速度初期保持稳定小幅增加,在1.54s 开始突然减小,此趋势表明,Y 方向上的挖掘力先正向小幅增加又朝反向大幅增大直至2.15s 达到最大,位置如图11(b)中B 点所示。此时正向挖掘速度近似最大,如图8 所示;此后加速度值增加,并在3.46s 起急剧增加。A、B、C三点表示机构Y 方向加速度的三个特征位置,分别为1.54s,2.15s,3.46s。这一规律与蝼蛄前足挖掘加速度曲线特征图4(b)有明显差别,但可以满足机构挖掘力的施加要求。在2.15s 和3.46s发生加速度突变可使机构产生对外的冲击力,有利于挖掘,但对于机构的防震,防冲击特性会有较高要求。

图11 Y 方向加速度曲线及最大加速度对应位置Fig.11 The Acceleration Curve in Y Direction
4.4 讨论
基于以上对设计结果的讨论与分析可知,此机构基本满足蝼蛄前足挖掘运动特征及设计目标要求。其轨迹近似符合蝼蛄前足挖掘运动轨迹;运动速度变化趋势与蝼蛄前足挖掘速度变化趋势基本相同,并且能在周期内相同阶段达到速度最大及最小值;加速度变化趋势虽有不同,但能做到蝼蛄前足挖掘力需求大时机构加速度增大,相反,需求平稳时保持基本平稳状态。
5 结语
采用高速运动采集系统,对蝼蛄运动特征进行采集并处理,得出特征曲线,然后将其作为设计依据开展仿生机构设计。基于曲柄滑块机构,该机构包括曲柄、曲线连杆、滑块。模拟结果表明,该仿生机构运动特征,包括轨迹、速度及受力等与蝼蛄前足挖掘运动特征近似;机构运动轨迹符合目标轨迹要求,能达到预期运动模式。本研究提供一种触土工作机构设计的新方法。
