利用Tracker软件探究加速度与合外力及质量的关系
2020-08-13温雯露
温雯露
(清远市第三中学 广东 清远 511500)
探究加速度与合外力的关系多数版本的高中物理教材采用打点计时器,利用打点计时器记录小车的运动信息,从而计算小车的加速度.而本文利用Tracker软件的追踪功能,有效地追踪小车的运动过程,同步描绘位移-时间图像.利用Tracker软件的数据分析工具对小车位移-时间图像进行分析拟合,得出小车运动过程加速度.
1 实验原理及方法
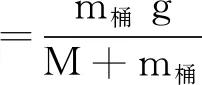
牛顿第二定律是动力学基本定律之一,对于一定质量m的物体,其所受的合外力和物体所获得的加速度a之间满足关系
F=ma
(1)
在本实验中,将小桶和小车相连,若在小桶内加入砝码,小桶和砝码总质量为m桶,则系统所受的合外力为
F合=m桶g
(2)
将小桶、砝码、小车作为一个系统,则根据式(1)可以得到总质量为M的小车加速度为
(3)
将式(2)代入式(3)可以进一步得到系统加速度理论值为
(4)
在本实验中,我们采用控制变量法.首先保证小车质量不变,改变小桶质量(即小车受的合外力),测量多组小车加速度;再保持小桶的质量(即小车受的合外力不变),改变小车的质量M,测量多组小车加速度.最后分析小车加速度与合外力及质量的关系.
2 利用Tracker软件探究加速度与合外力及质量的关系
2.1 实验仪器及步骤说明
2.1.1 实验仪器
实验需要的器材有塑料板、带定滑轮的长木板、小车(质量141.9 g)、小桶(质量3.7 g)、砝码、20 cm长的软尺等,其中软尺起到定标尺的作用.因为长木板表面各处粗糙程度不一,平衡摩擦力难度较大,故将塑料板固定在长木板上.将长木板一侧垫高,轻推小车,让小车匀速下滑.
2.1.2 视频拍摄
用双面胶将软尺贴在桌子边缘,用自拍杆将手机架设好,录制时应注意保持水平,减少因拍摄带来的测量误差.每次实验让小车从静止开始运动并用手机拍摄.
2.1.3 利用Tracker软件分析小车运动视频
打开Tracker软件,选择菜单的“视频—导入”,将视频加载,通过视频剪辑对视频研究的起始帧和结束帧进行剪辑.并按下列基本步骤进行分析:
(1)设定参考坐标.选择”轨迹-坐标轴”,在小车下滑的初始位置新建直角坐标系.
(2)进行参考尺寸定标.在定标工具中对实验中预先测量好长度的软尺进行定标.
(3)选择研究对象.实验研究对象是小车,点击工具栏中“创建/质点”,选择小车为质点.
(4)进行轨迹控制.小车上贴有红色标识线,播放小车运动视频,按住Ctrl,同时用鼠标单击追踪小车运动轨迹,如图1所示.
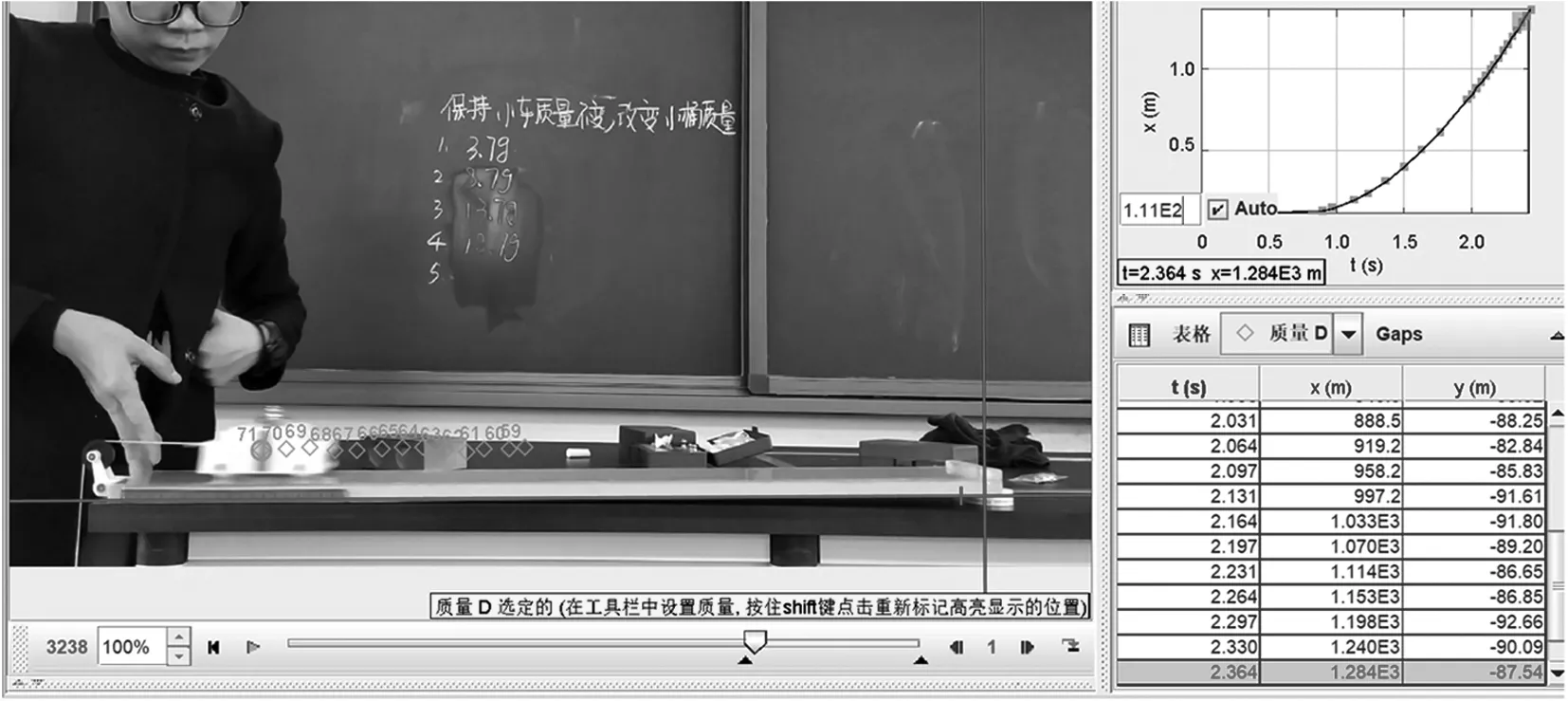
图1 视频分析界面
(5)选择要测量的物理量:位移和时间,Tracker软件描绘出小车位移—时间图像.
(6)保持小车质量不变,改变小桶的质量,令小桶的质量分别为3.7 g,8.7 g,13.7 g,18.7 g,23.7 g.
(7)保持小桶质量不变,改变小车的质量,令小车的质量分别为241.9 g,291.9 g,341.9 g,391.9 g,441.9 g.
2.2 实验数据收集及处理
小桶的质量分别为3.7 g,8.7 g,13.7 g,18.7 g,23.7 g时均对小车的运动进行拍摄,根据所拍摄的视频绘制出小车对应的位移—时间图像,对图像进行抛物线拟合,如图2~5所示;小车的质量分别为241.9 g,291.9 g,341.9 g,391.9 g,441.9 g时均对小车的运动进行拍摄,根据所拍摄的视频绘制出小车对应的位移—时间图像,选择软件进行抛物线拟合,如图6和图7所示,对图线用方程
x=At2+Bt+C
进行拟合,在软件中读取A的值,加速度a=2A.依据Tracker可以读取方程中系数A,B,C的值,图2~7分别读出A的值为0.102 3,0.236 1,0.361 9,0.605 9,0.028 64,0.022 63,将数值填入表1和表2.
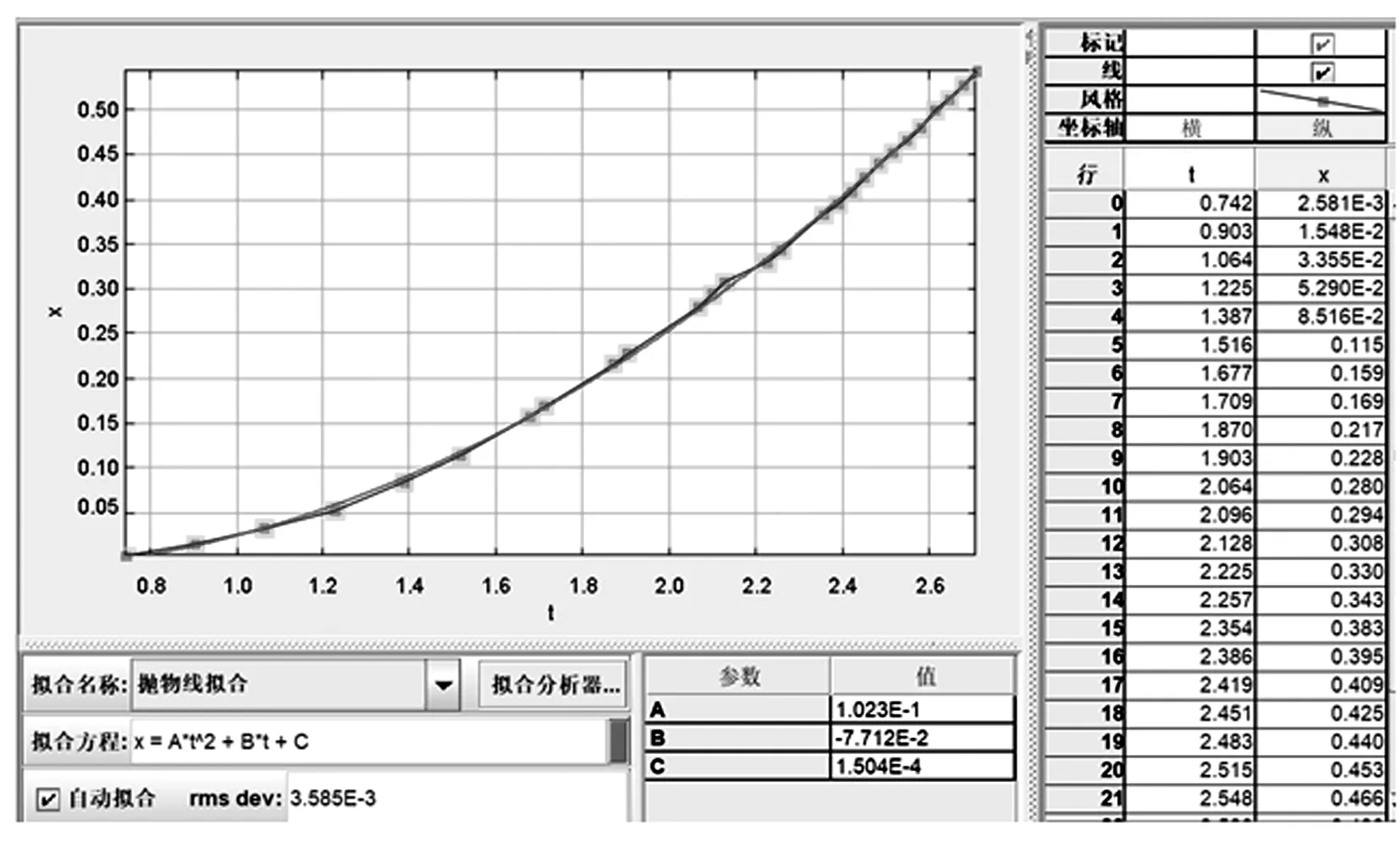
图2 小车x-t图(小桶质量3.7 g)
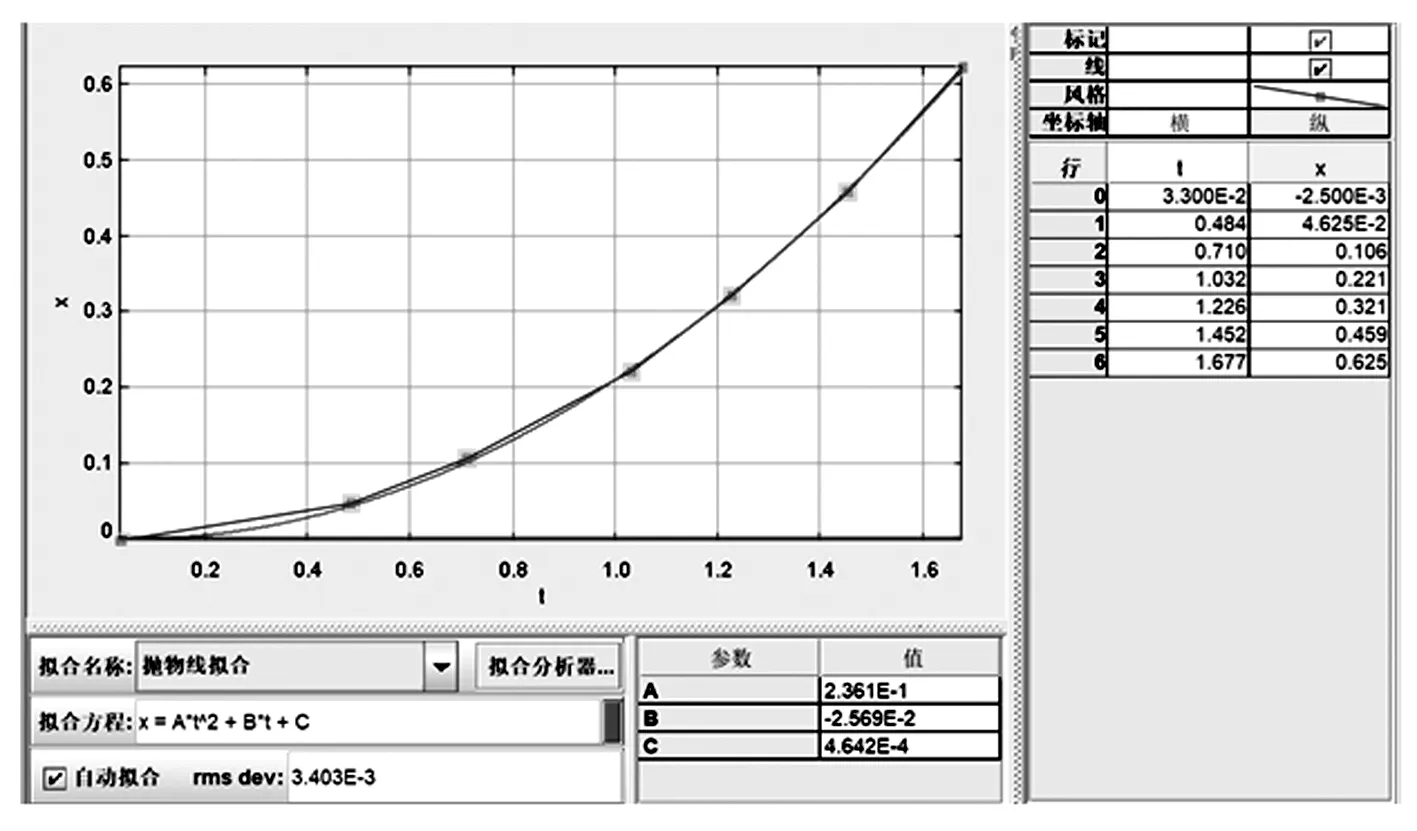
图3 小车x-t图(小桶质量8.7 g)
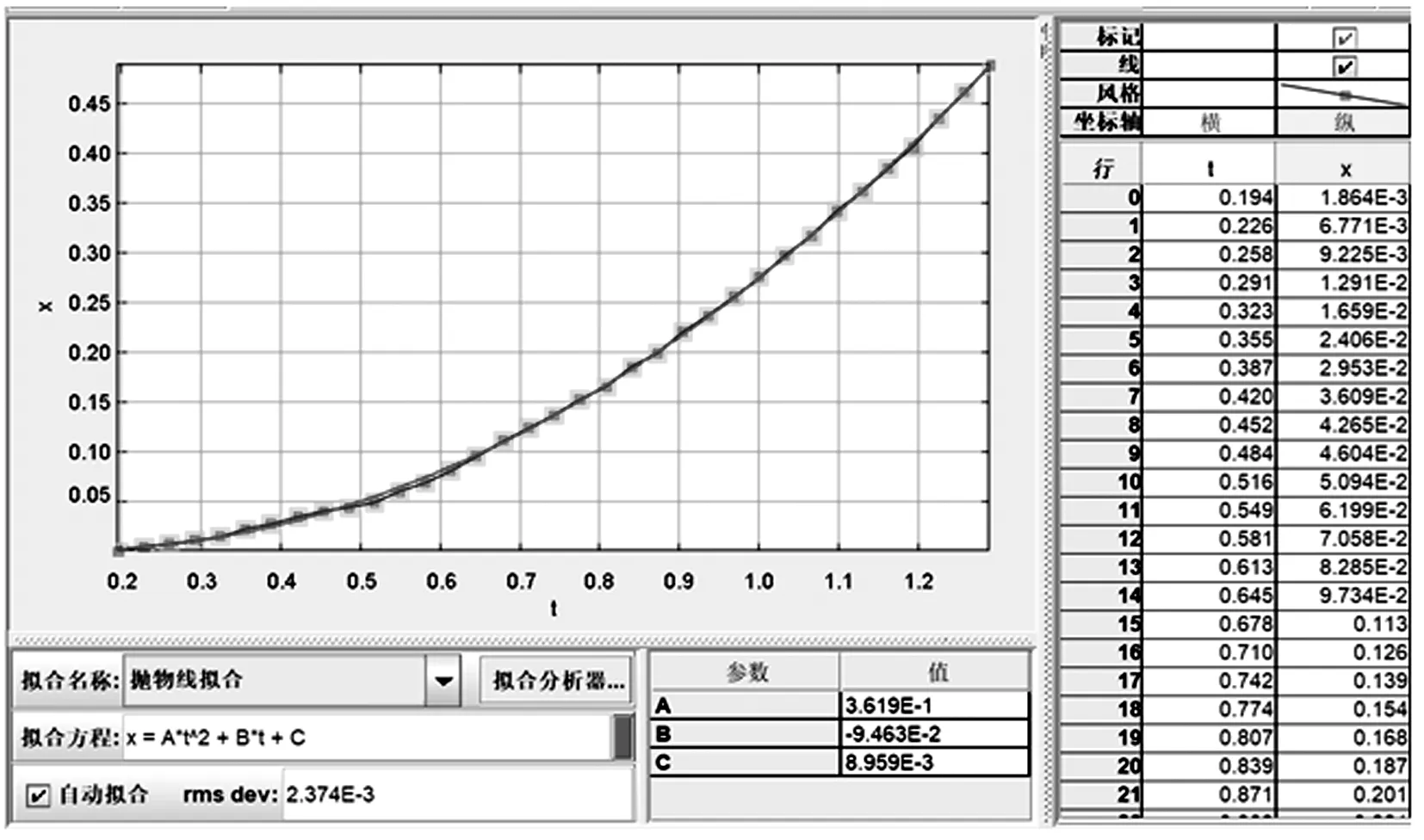
图4 小车x-t图(小桶质量13.7 g)
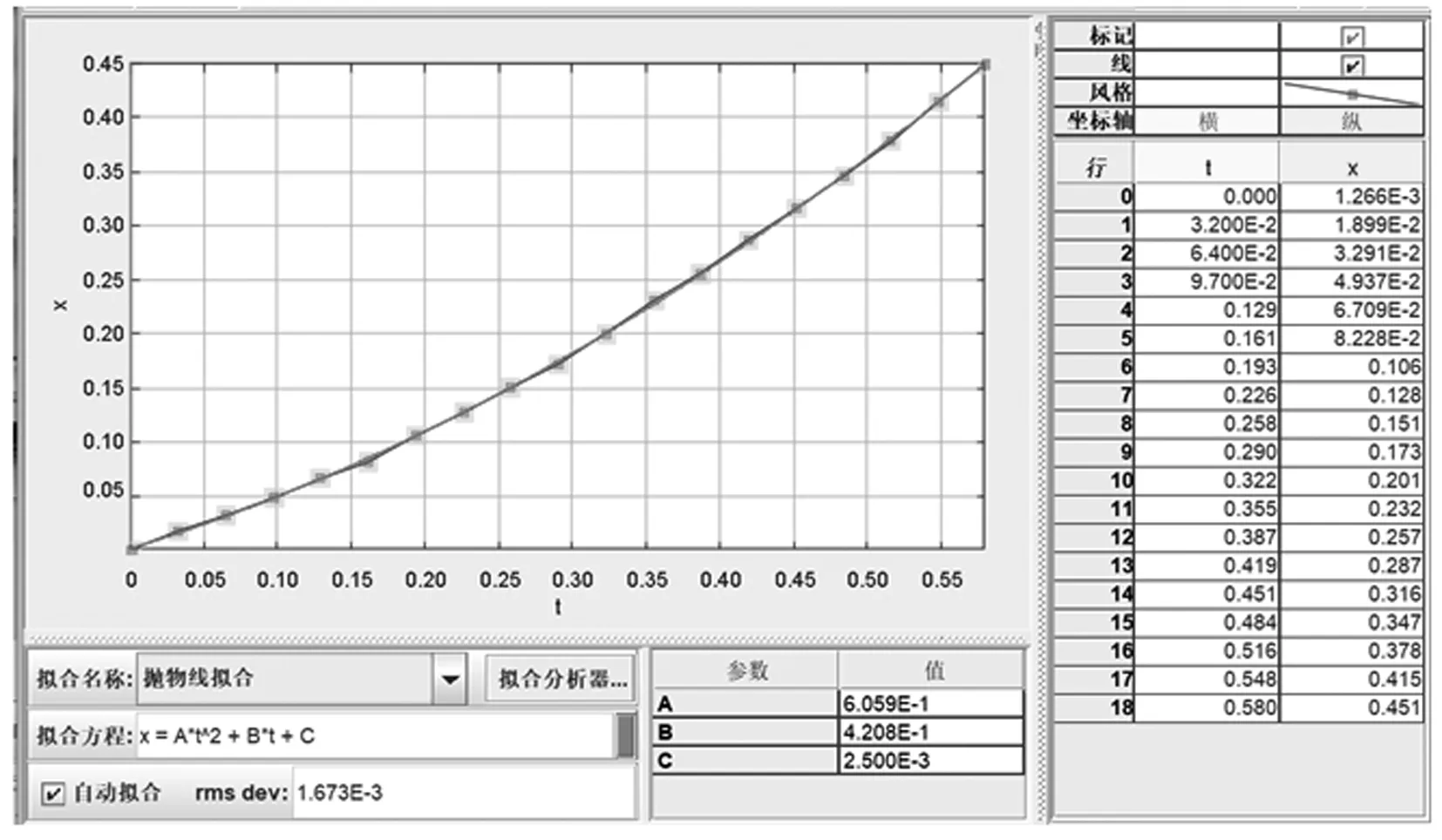
图5 小车x-t图(小桶质量23.7 g)
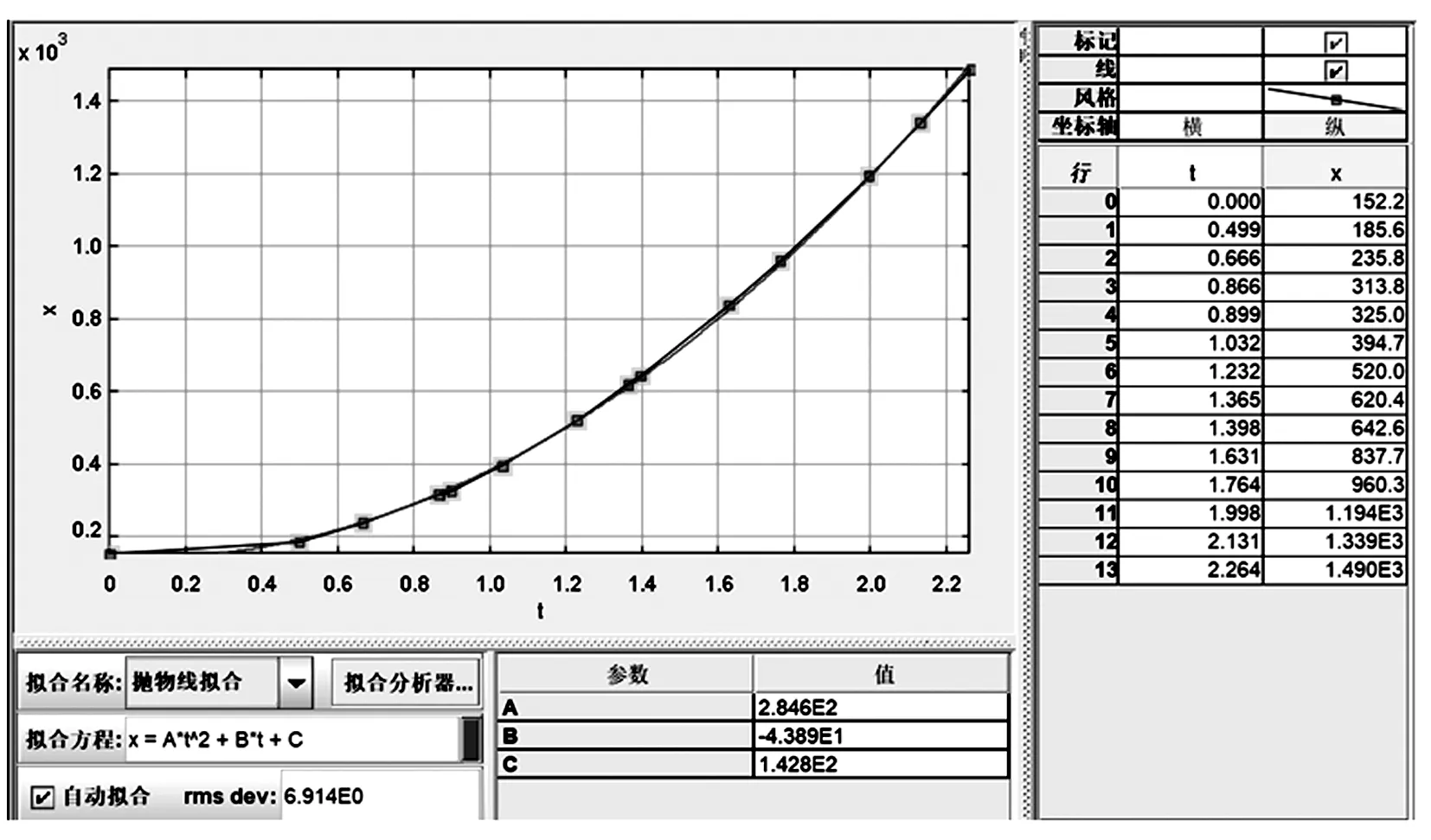
图6 小车x-t图(小车质量291.9 g)
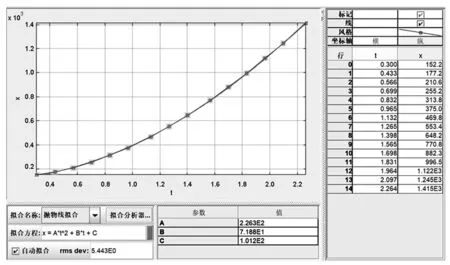
图7 小车x-t图(小车质量341.9 g)
由图分析得到的保持M恒定F不同时所对应的加速度值填入表1.
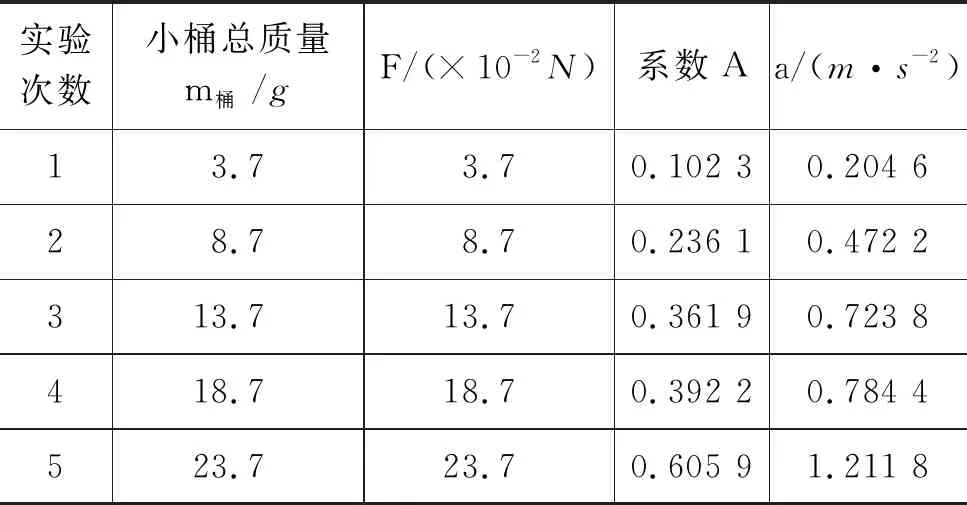
表1 保持M恒定F不同时所对应的加速度
由图分析得到的保持F恒定M不同时所对应的加速度值填入表2.
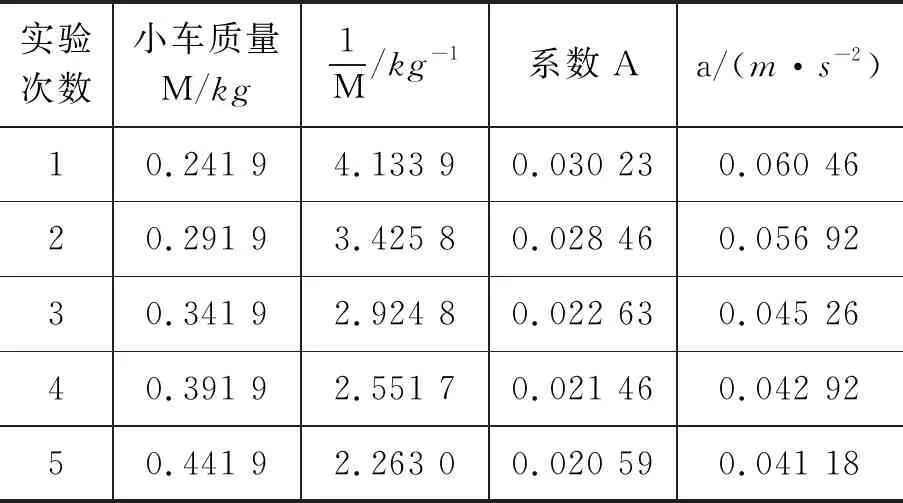
表2 保持F恒定M不同时所对应的加速度
探究加速度与合外力和质量关系如图8和图9所示.
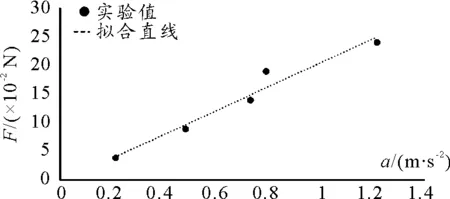
图8 F-a图像
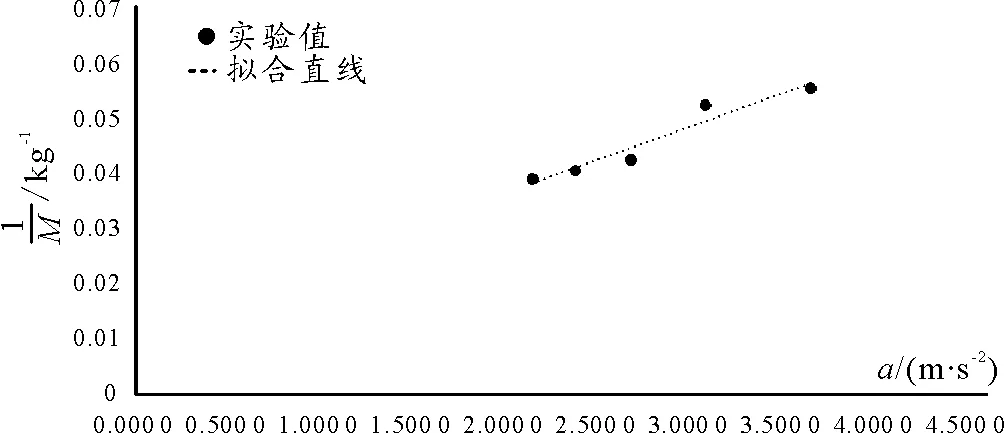
图-a图像
2.3 实验结论
从图8可以得出结论,当小车质量一定时,小车加速度与所受合外力成正比,从图9得到结论,当小车所受合外力一定时,小车加速度与质量的倒数成正比,即小车加速度与质量成反比.
2.4 实验误差分析
2.4.1 系统误差
本实验用小桶和砝码重力代替小车受到拉力,实际上小车受到的拉力小于小桶和砝码的重力.该实验方法造成的误差无法消除,可以尝试利用力的传感器直接测出小车所受拉力大小,优化实验,减小误差.
2.4.2 偶然误差
(1)测量误差;在Tracker软件中定义20 cm的长度,然后利用软件分析得出小车位移变化,在定义20 cm时会产生偶然误差;
(2)在Tracker软件中确定质点位置时不够准确,拟合得到的a产生偶然误差;描点作图存在偶然误差;
(3)平衡摩擦力不准确造成的误差.
3 结束语
通过以上研究,利用手机拍摄实验过程,可以多次回放,帮助学生检查自己的实验过程是否存在操作不当之处.利用Tracker软件较精确地记录小车运动轨迹,直接对小车运动位移进行数据采样分析,从而验证小车质量一定时,加速度与所受合外力成正比,小车所受合外力一定时,小车加速度与质量成反比.该方法直观、高效,测定结果误差较小,有利于教师课堂开展实验,也有助于学生课外自主探究,值得推广.
