机器人辅助腹腔镜手术治疗深部浸润型子宫内膜异位症 *
2020-08-12陈振波范文生李立安叶明侠顾成磊孟元光
陈振波 范文生 李立安 杨 雯 叶明侠 顾成磊 孟元光
(中国人民解放军总医院第一医学中心妇产科,北京 100036)
深部浸润型子宫内膜异位症(deep infiltrating endometriosis,DIE)是子宫内膜异位症(内异症)的一类,病变多分布在腹膜外的盆腔深部,如宫骶韧带、阴道后穹隆深处、结直肠、膀胱及输尿管等部位,病灶浸润深度达5 mm或以上,具体发病机制尚不明确,其临床表现除较为常见的痛经、慢性盆腔疼痛外,根据侵犯部位的不同可有特殊临床表现,侵犯输尿管及膀胱可有腰痛、肾盂积水,侵犯结直肠可有肛门坠胀、经期便血甚至不完全肠梗阻[1~4]。DIE的治疗以手术为主。我科2015年3月~2019年1月采用机器人辅助腹腔镜手术治疗9例DIE并随访,报道如下。
1 临床资料与方法
1.1 一般资料
本组9例,年龄33~45(39.1±4.7)岁。腹部或腰部疼痛3例;经期血尿1例;进行性痛经3例,其中1例伴经期便血;肛门坠胀4例。妇科超声、肠镜、盆腔MRI及CT提示:2例膀胱局部结节,6例直肠前壁增厚、局部结节或肠黏膜下结节,1例输尿管扩张。其中4例伴卵巢子宫内膜异位囊肿,3例伴子宫腺肌症。4例有剖宫产史,2例阴道分娩,2例不孕,1例无性生活史且有卵巢子宫内膜异位囊肿手术史。
结合临床表现、术前检查综合分析均考虑诊断DIE,涉及多学科如普外科、泌尿外科共同台上合作完成手术操作,考虑到不同术者间器械使用习惯、助手配合默契程度差异,故采用机器人系统辅助腹腔镜手术,不同术者可根据操作习惯自行调整助手机械臂。
1.2 方法
手术设备:达芬奇(da Vinci)Si手术系统主要包括控制台、操作系统和三维成像系统。①医生操控系统(Doctor Cart)是控制核心,由计算机系统、监视器、操作手柄与输出设备组成,术者通过手柄(2个主控制器)、脚踏板实施操作。②床旁机械臂系统(Patient Cart)是操作组件,含器械臂和摄像臂。③成像系统(Video Cart)内装有计算机核心处理器与图像处理设备,采用高分辨率3D镜头,放大10~15倍。
术前准备与腹壁穿刺:小截石头低臀高位,于脐孔上方3~4横指穿刺12 mm trocar置入机器人镜头臂,镜头臂左侧依次旁开4横指穿刺助手操作12 mm trocar和2号臂8 mm trocar,镜头臂右侧依次旁开4横指穿刺1号臂8 mm trocar和3号臂8 mm trocar。
根据术中探查病灶位置、范围及侵犯深度实施手术。①输尿管腔内型DIE结节行输尿管狭窄段切除+端端吻合+双J管置入术(图1):暴露输尿管狭窄环并切断,沿输尿管中上段纵行切开约0.8 cm,自下而上放置双J管,4-0可吸收线缝合。②膀胱DIE结节行部分膀胱切除+膀胱修补术(图2):分离膀胱与子宫前壁粘连,打开膀胱腹膜反折,下推膀胱;于阔韧带下方打洞,外推输尿管;自膀胱内注入生理盐水,于膀胱壁隆起处切开膀胱壁全层,见黏膜层紫蓝色病灶,沿病灶外缘0.5 cm切除部分膀胱,切缘电凝止血,1-0可吸收线连续缝合膀胱壁全层,并连续缝合浆膜层与膀胱腹膜反折;再次膀胱内注入生理盐水,腹腔内未见渗漏。③直肠DIE结节行部分直肠切除+端端吻合,或部分直肠前壁切除+直肠修补术:部分直肠切除+端端吻合术,离断左侧直肠侧韧带与右侧直肠侧韧带,沿直肠前间隙向下游离直肠终末端,清理该处直肠周围脂肪组织,距DIE病灶下缘约2 cm切开直肠壁,离断直肠,可吸收线荷包缝合直肠壁,置入胃肠吻合器行端端吻合术。部分直肠前壁切除+直肠修补术(图3),沿直肠浆膜层剥离直肠表面病灶结节,切除该处肠壁,3-0可吸收线“8”字缝合缺口,并以3-0可吸收线连续缝合直肠浆膜层。术中所见盆腔其他部位子宫内膜异位病灶一并切除。
术后给予亮丙瑞林3.6 mg/月皮下注射3~6次,观察围手术期并发症,出院后每3个月门诊复查,包括双肾、输尿管及膀胱超声、盆腔MRI、肠镜、尿常规、便常规。
2 结果
9例均顺利完成机器人辅助腹腔镜手术,无中转开腹。DIE术中所见、术式及手术指标见表1。7例合并直肠、膀胱及输尿管以外子宫内膜异位症(包括卵巢子宫内膜异位囊肿5例,骶韧带子宫内膜异位结节4例,子宫腺肌症2例),术中尽量完整切除所见异位病灶,2例合并子宫腺肌症者年龄>40岁且无生育要求,同时行全子宫切除术。围手术期均无肠漏、肠梗阻等严重并发症,均顺利出院,术后病理报告均证实为DIE。
1例留置的双J管于术后12周拔除。术后亮丙瑞林治疗3次6例,6次3例。9例术后随访10~14(12.0±1.2)月,腰腹痛、肛门坠胀、经期便血、血尿等临床症状均消失,复查尿常规、便常规未见异常,复查超声未见明显结节复发及增厚。行部分直肠切除+端端吻合2例复查肠镜,吻合口愈合良好,未见明显新发病灶及瘘。1例不孕患者术后12个月自然受孕,另1例计划避孕。
3 讨论
腹腔镜手术是DIE的主要治疗手段,视野广,可以充分观察盆腔情况,创伤小,术后恢复快,并能有效去除大多数病灶,解除症状[5]。但因2D视野及双极钳无法转变角度等缺点,可能影响术者对异位结节浸润深浅的判断,异位结节位置深而角度刁钻,腹腔镜器械到达病灶部位相对困难,故对技术要求高,存在安全问题,文献报道腹腔镜DIE手术的术中并发症发生率为0~2.6%,术后并发症发生率为7.8%~19%[6],不容小觑。机器人辅助技术具有灵活性增强、活动范围扩大和组织层次感知能力增强的特点[7],而且具有优化人体工程学、三维立体可视化、更高的精度、更精密的仪器和更短的学习曲线,克服传统腹腔镜的局限性,在许多外科领域得到广泛应用,尤其达芬奇Si系统4个机械臂在复杂的妇科疾病解剖中显示出优越性[8]。
本组机器人辅助腹腔镜在手术中有着明显的优势:1例输尿管DIE病变切除进行端端吻合时,机器人的抖动过滤系统发挥了重要作用,避免手部震颤和摇晃而牵拉撕扯输尿管断端,进针吻合时也能精准定位进针点,避免手部抖动导致反复多次进针加重输尿管吻合口的损伤(图1)。直肠DIE病灶多位于直肠前壁盆腔较深的部位,trocar位于上腹部,腹腔镜器械如双极钳、抓钳平直而无法变换角度转动,故很难到达病灶部位,操作十分不便,后续镜下缝合更是困难。本组6例直肠DIE,病灶均位于直肠前壁盆腔深处,利用机械臂可以360°无死角旋转的特性,可以轻松到达病灶部位进行操作,镜下缝合也能利用该特性轻松完成;另外,机器人具有3D视野,视角广且为立体图像,镜下解剖层次感清晰,相较常规腹腔镜2D平面视野,能够更准确清晰地在术中判定病灶浸润深度、范围,精准辨认粘连部位操作间隙,进而决定手术方式。本组6例直肠DIE和2例膀胱DIE,根据术前检查及术中所见,2例直肠部位病灶和2例膀胱部位病灶可以清楚判定病灶浸润至黏膜层,且直肠部位病灶最大直径约3 cm,无法完全将病灶与正常组织分离,故手术方式选择部分直肠切除+端端吻合、部分膀胱切除+修补(图2)。另外4例直肠DIE镜下辨别侵犯较浅且病灶范围较小,故手术方式选择部分直肠前壁切除+直肠修补(图3)。9例术后随访10~14个月,临床症状均消失,尿常规、便常规未见异常,影像学检查未见异常,吻合口处未见新发病灶及瘘,治疗效果满意。
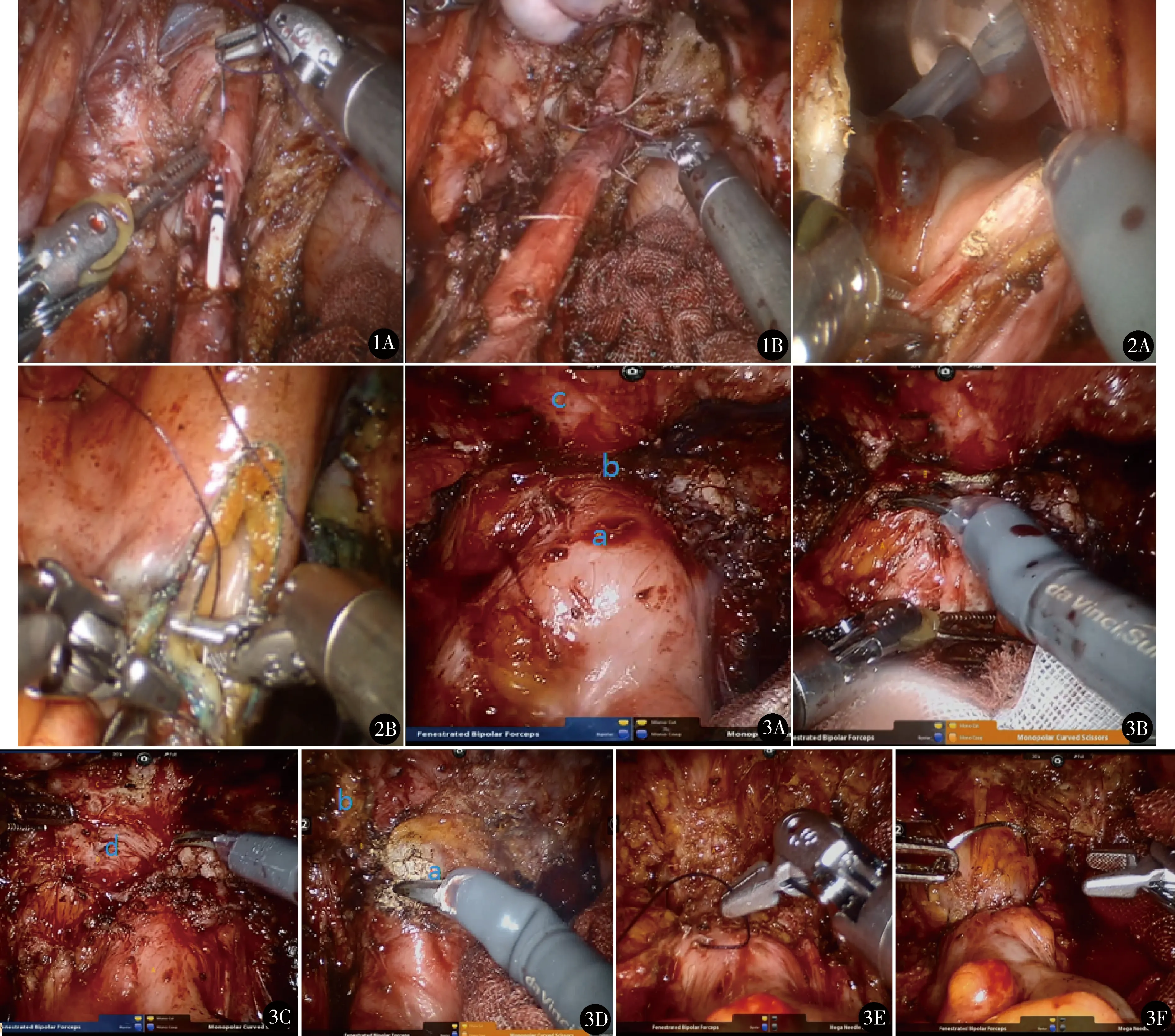
图1 输尿管DIE:A.开始缝合输尿管;B.缝合后的输尿管 图2 膀胱DIE:A.膀胱黏膜层紫蓝色结节病灶;B.切除部分膀胱后缝合 图3 直肠DIE部分直肠前壁切除术:A.探查见粘连明显(a为直肠前壁,b为直肠子宫粘连处,c为子宫后壁);B.在机器人3D视野下精准辨明粘连间隙,利用电剪刀分离致密的粘连处;C.已分离粘连(d为分离后的粘连面,可见直肠子宫之间明显DIE病灶位于电剪刀下方);D.电剪刀切除DIE病灶,因病灶侵犯直肠浆肌层,切除了部分直肠浆肌层(a为切除DIE病灶后的直肠前壁缺损面,b为切除的DIE病灶);E.开始镜下缝合修补直肠前壁的缺损面;F.完整缝合修补直肠前壁的缺损面

表1 DIE术中所见、术式及手术指标
多数研究显示机器人辅助腹腔镜在DIE治疗中具有优势,尤其在肠道和泌尿系DIE方面有着独特优势,可降低手术并发症风险,术后保持良好的肠道及泌尿系功能[9,10]。相较于传统腹腔镜,机器人辅助腹腔镜能够提高手术性能,降低围手术期并发症和中转开腹手术风险[11]。另外,机器人也可以应用到单孔腹腔镜中,对于泌尿系和肠道DIE都有确切的治疗效果,但也有多中心RCT研究表明机器人手术在失血量和手术时间上相较于传统腹腔镜均要多而长,但在平均住院日、中转开腹率方面则无显著差异[12,13]。
由此可见,机器人手术在治疗DIE方面是否一定较腹腔镜手术存在明显优势和获益尚存在争议,后续仍需要多中心、大数据对比研究才能得出更准确的结论。机器人因手术花费昂贵、医生培训复杂,在我国并未得到广泛应用。另外,子宫内膜异位症在育龄期女性中的患病率为10%~15%,而DIE仅占子宫内膜异位症的8%~12%[14,15],故DIE行机器人辅助腹腔镜手术较少。本组9例,病例数量少,后续将会继续收集病例,并计划与传统腹腔镜治疗DIE的效果做对比研究。多中心合作共享病历数据可能是今后机器人辅助腹腔镜手术治疗DIE研究取得进展的关键。
总之,机器人辅助腹腔镜手术治疗深部浸润型子宫内膜异位症是安全可行的,机器人手术是微创手术的发展趋势,具有良好的应用前景和研究价值,随着医疗技术和经济的发展,机器人手术成本将会降低,设备更为精良,这门新兴技术将会在妇科手术领域广泛应用。
