铁路接触网振动频率检测控制系统设计
2020-08-11李宗荫郭迎庆郭子杰朱云贵
李宗荫,郭迎庆,郭子杰,朱云贵
(南京林业大学机械电子工程学院,南京,210037)
引 言
接触网是电气化铁路系统中最重要的组成部分之一。在电气铁路系统中,接触网是铁路牵引供电设备的一个重要组成部分,由于铁路接触网沿铁路露天布置,工作环境恶劣,并且它是通过与受电弓的滑动接触为火车提供动力,所以一旦故障停电将中断行车。另一方面,接触网沿铁轨线路布置于上空特定位置,从而使检修人员检查起来非常不方便[1-2]。目前在中国用于检测铁路接触网的方式主要分为静态检测和动态检测两种[3]。李文豪等设计出一系列能够用于不同时速要求的接触网振动检测的接触网检测车,采用动态检测完成对接触网的检测工作[4]。李育冰等提出一种基于激光图像处理的测量方法,其具体实现是激光进行扇形扫描,在接触网上形成光斑,并在相应相机成像,通过对光斑像素的处理获得光斑在相机中的视角方向,利用相机、激光器的几何关系,采用坐标转换原理获得接触网几何参数,以此来判断接触网的好坏[5]。然而这些检测方法结构比较复杂,检测范围也相对较窄。为此本文设计了一种能自由在接触网上行走且可检测接触网内部振动频率的巡检机器人,该振动频率检测控制系统以51 单片机为微处理器,通过蓝牙通信进行振动频率的无线传输,利用数据显示模块实时显示出对应的振动频率。该装置结构设计精巧、操作简单且通用性较强,极大地方便工作人员有针对性地对检测到接触网振动频率异常的部分进行维修或保护。
1 铁路接触网的概述
接触网是沿铁路线上空架设的向电力机车供电的特殊形式的输电线路,它由接触悬挂、支持装置、定位装置、支柱与基础等几部分组成[6-7]。其中接触悬挂包括接触线、吊弦、承力索以及连接零件,接触悬挂通过支持装置架设在支柱上,其功用是将从牵引变电所获得的电能输送给电力机车。支持装置用以支持接触悬挂,并将其负荷传给支柱或其他建筑物,根据接触网所在区间、站场和大型建筑物有所不同,支持装置包括腕臂、水平拉杆、悬式绝缘子串,棒式绝缘子及其他建筑物的特殊支持设备。定位装置包括定位管和定位器,其功用是固定接触线的位置,使接触线在受电弓滑板运行轨迹范围内,保证接触线与受电弓不脱离,并将接触线的水平负荷传给支柱;支柱与基础用以承受接触悬挂、支持和定位装置的全部负荷,并将接触悬挂固定在规定的位置和高度上。
2 移动装置的基本组成
根据接触网的结构特点以及振动频率检测作业的任务分析,综合考虑设计出一种可以自由移动的巡检机器人,其结构图如图1 所示。
该装置主要由底板、支撑架、滑轮及夹线夹4 部分组成,其中底板主要用于单片机、电源和红外探头的安装;而支撑架是竖直固定在底板上,本身作为夹线夹和滑轮的固定架用来支撑整个装置,使装置形成一个刚性架构。滑轮则由外轮及套筒组成,外轮槽宽度略微比接触网线宽一点,有利于装置线上的稳定性,采用组合形式组装滑轮,套筒与外轮间相对转动,与外轮直接与接触网之间的滑动相比,可以减小两接触体间的摩擦,从而减小装置前进的阻力。夹线夹是由两片相同结构的半圆弧组合而成,圆弧直径略大于线的直径,在夹线夹开口处设计插销扣,当在接触网上安装装置时要插上固定销,防止装置移动时出现意外掉落。
在整个装置设计过程中,底板、支撑架及夹线夹作为固定部分,滑轮为机构的从动部分。当滑轮挂在线上时,整个装置由电机带动主动轮转动,从动轮通过主动轮传递的动力转动,从而带动整个装置在线上前进。滑轮及夹线夹的安装位置和底板的中心线在一条直线上,从而保证装置能够平稳地在线上实现前进或后退等功能。另一方面,由于接触网线本身具有一定的承载能力,且线路较平缓无障碍,检测装置可沿接触网线为作业线路进行自由移动。因此本文采用一种缆车式单侧悬挂结构,选择平直的一条接触网线作为作业路径,利用滑轮将装置悬挂在接触网上,装置带动控制系统及检测系统等设备在线路上自由移动来完成检测作业任务。
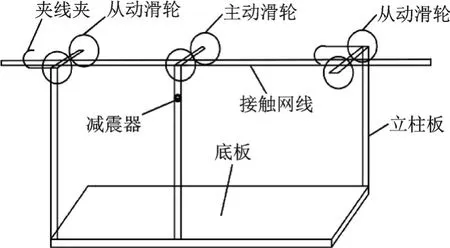
图1 自由移动小机器人的结构示意图Fig.1 Schematic diagram of small free-moving robot
3 控制系统硬件设计
对于铁路接触网振动频率检测控制系统的硬件设计,主要包含自由移动控制模块、控制器模块和检测模块的硬件设计。其自由移动控制模块的硬件主要是直流伺服电机及其驱动器[8]、无线遥控器以及接收器的设计。控制器模块主要包含数据处理模块、蓝牙模块、频率显示模块和主控制器模块的硬件设计。检测模块主要包含探头线圈、前置器以及压电晶体的设计。该铁路接触网检测系统的硬件结构如图2 所示。
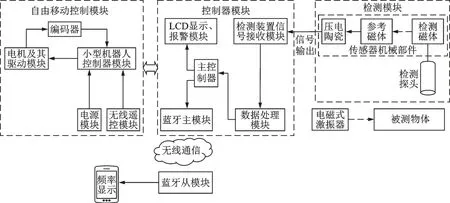
图2 控制系统硬件结构图Fig.2 Control system hardware structure diagram
3.1 振动检测模块硬件设计
由于铁路接触网是一个复杂的系统,而且系统也会受到接触网质量、列车运行速度等其他相关因素的影响,所以接触网的振动是一个复杂的随机振动。本文主要是从受电弓和接触网的结构上分析接触网的振动规律,以简单链形悬挂结构为计算模型[9],此处只考虑接触悬挂的竖向振动,其承力索和接触 线 第i阶 振 型[10]为

式中:x为x轴向的计算长度,n为模态振型阶次,Ai(t)、Bi(t)分别为承力索第i阶振动幅度,t为时间变量。根据式(1,2)建立一个3 跨的简单链形悬挂有限元模型并利用ANSYS 软件进行模态分析,接触网整体的固有频率的计算结果如表1 所示,根据计算结果可以看出,接触网的固有频率最低为1.08 Hz,并且在低频区内固有频率的数值比较集中,其18 阶振型的固有频率值也仅为6.81 Hz,所以接触网系统为一低频系统。一般来说,接触网的自由振荡都属于低频振动,接触网的振动主要取决于低频振型。
接触网振动频率信号检测模块主要分为传感器和其相关的信号调理电路,综合考虑本系统传感器安装环境以及接触网的低频振动特性,最终检测探头主要采用新型电涡流位移传感器的检测模块。当其工作时作用力施加在弹性元件上,并且在其弹性元件上粘贴压电元件[11-12],其中压电元件是频率检测系统的核心,它的性能直接影响到检测性能的好坏,综合考虑接触网频率检测的精度和检测范围,压电元件选用具有正压电效应和逆压电效应的压电陶瓷片。工作时,当弹性元件受到电磁力作用并将其变形传递到压电陶瓷片上,压电陶瓷片会伴随弹性元件一起振动,此时片内的电偶极矩会因其正压电效应产生压缩而变短,由此将会在材料相对的表面上产生等量正负电荷,并且压电陶瓷片由于正压电效应将产生持续的交流电信号,波形趋近正弦波[13]。随着被测对象靠近传感器,它的有效电阻增加,反射电感减小,从而使线圈的电感品质因数Q值下降,其振荡也慢慢衰减,直到被测对象停止振荡(如图3 所示)。振荡信号被信号调理电路处理并转换成开关量来控制驱动器件,从而实现非接触式检测目的。
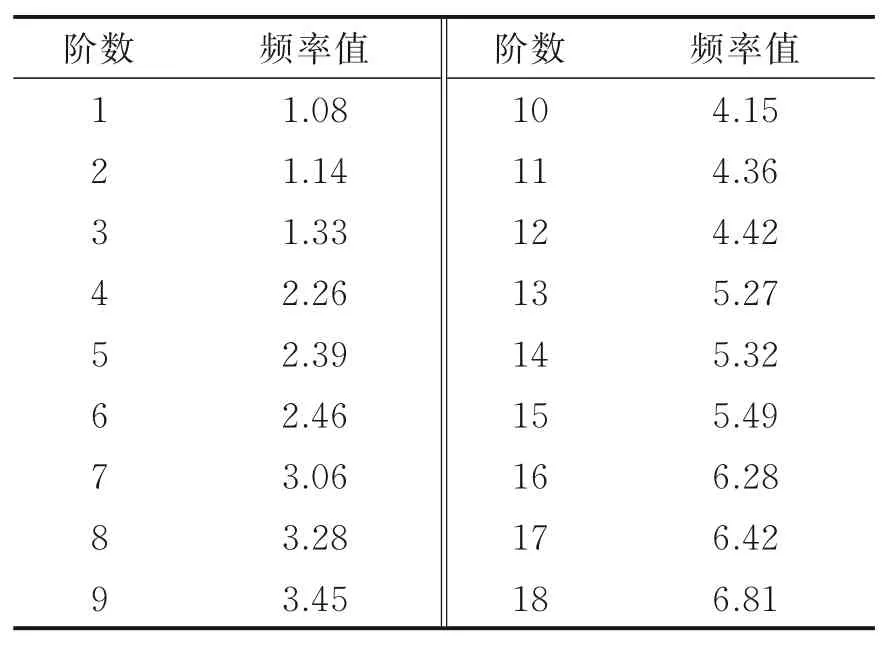
表1 接触网固有振动频率Table 1 Natural vibration frequency of catenary Hz
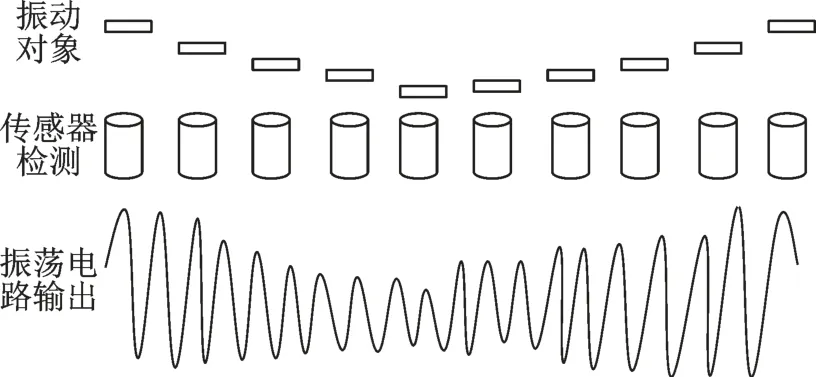
图3 电涡流式检测探头振荡电路输出电流示意图Fig.3 Schematic diagram of output current of oscillating circuit of eddy current detector
3.2 控制模块硬件设计
红外传感和红外遥控模块。由于检测巡检机器人悬挂于接触网线下段完成振动频率的检测,可以考虑装载红外线传感器完成对接触线位置的定位工作,并通过无线模块将其位置信息发送至地面接收端,其工作原理是通过检测红外传感器反射光光强大小来判断传感器所处环境[14]。此外由于红外遥控技术具备抗干扰能力强、无线化操作和构造简单等优势,再综合考虑铁路接触网检测工作环境,最终自由移动控制模块采用红外无线遥控来操作自由移动小机器人,其有效操作距离为20 m。
故障语音报警模块。巡检机器人在接触网上遇到故障致使电机异常时,报警模块蜂鸣器发出警报,报警信号由主控制器模块传至工作人员智能手机上并语言通知及时前去处理。
频率检测系统控制器模块硬件电路设计。根据检测模块输出的电信号进行放大和滤波处理,然后通过桥式整流电路进行全波整流后形成单向脉动电流,同时将该单向脉冲电流输入到NPN 三极管的基极上,另外将发射极进行接地处理,同时将三极管的集电极与单片机的外部中断接口进行连接,发射集进行接地处理。由于单向脉动电流会随电压一起发生变化,当其电压超过三极管的导通电压时开启三极管,否则三极管关闭,从而形成开关电路。最后利用单片机系统的外部中断功能,测量1 s 内三极管开关的次数,从而完成对接触网振动频率的检测,其原理如图4 所示。
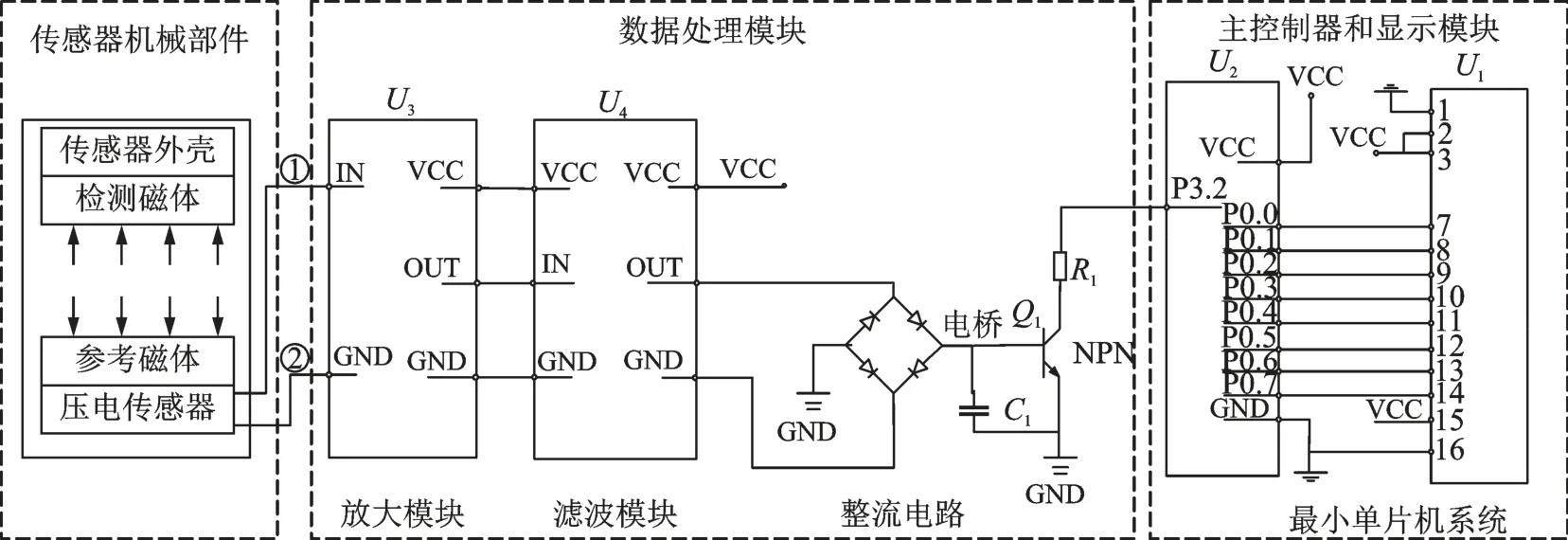
图4 频率检测系统硬件电路原理图Fig.4 Hardware schematic diagram of frequency detection system control module
4 控制系统软件设计
控制系统的软件设计主要包含控制器程序和数据处理程序两部分的软件设计,其中控制器程序主要包含蓝牙通信模块、人机交互模块以及数据显示模块的程序设计,而数据处理程序则主要是完成数据滤波处理和数据拟合修正的程序编写。
4.1 控制器软件设计
振动频率检测系统的控制器软件设计主要是包含数据处理模块、人机交互模块以及数据显示模块3 部分的软件设计。通过人机交互模块完成对巡检机器人的运行、调试以及故障的处理;数据处理模块主要是完成对检测数据的采集与转换工作,从而实现对检测数据的传送与存储;数据显示模块是显示出经过数据处理模块转换后所得振动频率的数值。根据本设计的控制系统需要实现的功能,该控制器的流程设计如图5所示。
系统启动后,完成相应的初始化工作,通过人机交互模块使巡检机器人匀速前行。频率检测系统启动,数据采集系统开始进行数据的采集,然后数据转换系统开始进行数据的转换。当数据传输串口接收到传送过来的数据,此时把测得数据送至LCD 显示模块进行显示,同时通过无线模块传输给地面接收单元,从而完成了一次完整的数据采集和传输的过程。通过对流程图的程序功能分解,采取了模块化的设计思路,将其分为Main()主模块和数码管LCD.h 显示以及无线蓝牙bluetooth.h 传输3 个软件程序模块,结合单片机的底层驱动完成整个控制器的软件设计。
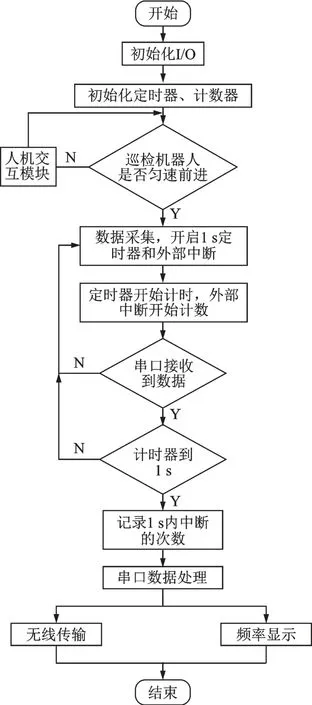
图5 控制器软件系统流程图Fig.5 Flow chart of controller software system
4.2 数据处理模块软件设计
4.2.1 数据滤波处理
在交流电气化铁道系统工作的过程中,由于交流和直流系统中的高次谐波容易产生交变磁场,而交变磁场在电缆中又可以引起感应电流,从而影响检测结果不准确。滤波器可以根据有用信号和噪声的不同特性,消除或减弱噪声信号,提取有用信号,而数字滤波器是其中一种利用有限精度算法实现滤波功能的离散时间线性时不变系统[15]。对于数字滤波器,它既可以利用特定的数字硬件电路或信号处理器来实现,也可以编写计算机程序来实现数字滤波器。由于本检测系统对所设计的数字滤波器不要求线性相移,并且在相同的条件下,FIR 数字滤波器比IIR 数字滤波器阶数的阶数要高[16]。综合考虑设计的合理性和检测系统所要求的频率特性,本设计选用巴特沃斯低通数字滤波器并通过编写软件程序对信号进行数字滤波。
根据确定好的滤波器类型,首先将其转换为模拟低通滤波器的模拟指标,利用MATLAB 工具箱中提供的Buttord 函数和确定滤波器的最小阶数,然后使用Butter 函数来完成数字滤波器的设计。最后将其中一组在实验室接触网模拟中采集到的振动数据,经过设计好的滤波器进行滤波处理,其原始数据波形、滤波后的波形如图6 所示。由图6 可以看出本次设计的滤波器达到了很好的降噪效果,剔除了一些无用数据,完成了对实验数据的滤波作用。
4.2.2 数据拟合修正
在实际的铁路接触网结构中,接触线张力会随着外界条件的变化而发生明显变化,为了保证接触线的张力在空载情况下恒定,高速铁路的接触线均采用全补偿悬挂,一般棘轮补偿是应用最为广泛的补偿方式[10]。然而在实验室进行测试时鉴于实验过程中存在着接触线张力、密度以及检测系统本身等因素的影响,使测量结果具有一定的非线性误差,并且在不同激振频率下的测量误差有所不同。为了降低测量误差,获得准确的测量值,故而采用最小二乘法[17-18]原理进行系统测量数据的曲线拟合。
在激振频率为10~20 Hz的范围内选择12,14,16,18 Hz来测试振动频率,检测点为Xi,对应频率输出值为Yi,由此可得 4 组在不同激振下对应的数组 (XAi,YAi)、(XBi,YBi)、(XCi,YCi)、(XDi,YDi),根据数据变化的趋势选取三次多项式进行拟合,寻找出能使最小的拟合函数φ3(x),利用MATLAB 分别对上述4 组不同激振频率下检测到的振动频率值进行曲线拟合,得到具体拟合函数的图线如图7 所示。
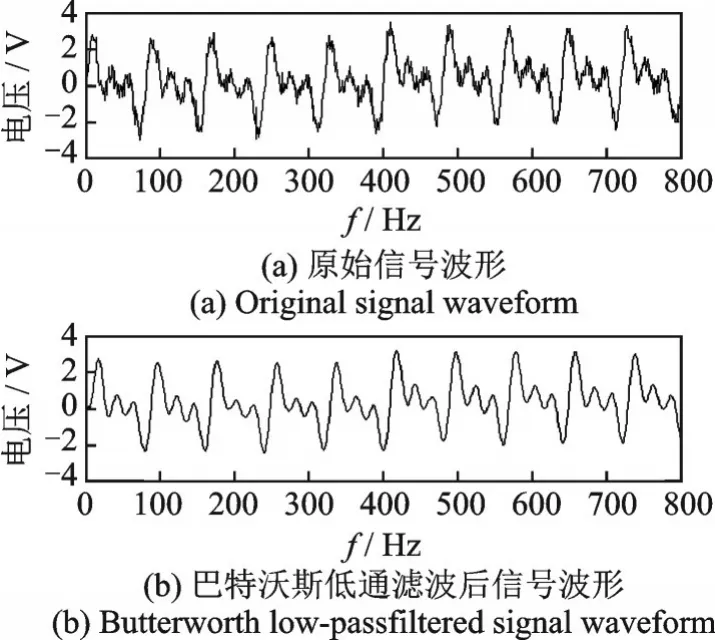
图6 数字滤波器滤波前后波形对比图Fig.6 Digital filter before and after filtering waveform comparison diagram
由于选取三次多项式完成曲线的拟合,固模拟函数表达式为

根据仿真曲线模拟后得到模拟函数中的系数a1~a3、b的值,各系数值如表2 所示。由表2 中的系数可以得到如下10~20 Hz 内的4 个三次多项式模拟函数

最后利用MCS-51 单片计算机的汇编语言程序编制修正程序,并且根据给予的激振频率大小选择合适的保存在E-PROM 中4 条曲线拟合函数来修正非线性误差。
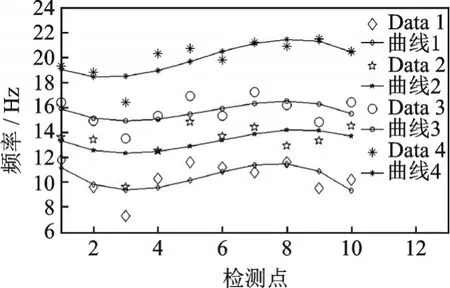
图7 测量初始值和三次拟合多项式曲线图Fig.7 Initial measured values and obtained cubic fitting polynomial curves
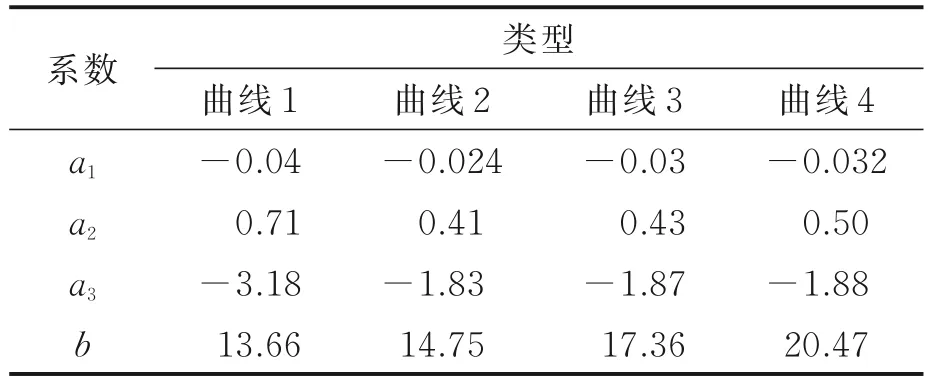
表2 三次多项模拟函数系数Table 2 Coefficients of cubic multinomial simulation functions
5 实验调试与结果分析
在完成该频率检测系统的设计后,将设计的巡检机器人机械结构各部分组装好,并将相关设备装配在设计好的可自由移动的机械结构平台上,完成频率检测装置的校准和传感器固定工作,防止检测系统测量过程中产生一定的系统误差。通过无线遥控器完成对巡检机器人自由准确移动的控制,再通过为移动巡检机器人配载的频率检测设备完成接触网对应检测点振动频率的检测任务。该巡检机器人实验测试现场如图8 所示。
由于接触网跨距不仅影响接触网的静态刚度和模态,还对弓网系统的工作频率起决定性作用[19]。所以在实验测试现场利用巡检机器人分别对跨距为3 m 和6 m 的两组铁路接触网线进行检测,并且将其划分10 个检测点(其中检测点3 处有破损,其余检测点均无破损),并以支柱的一端为起点,跨过最后一个检测点后的末尾处作为终点。由表1 知接触网的固定频率在1~7 Hz,为了防止被测对象发生共振,激振器给予的振动频率为10~20 Hz,开始实验时分别对不同跨距接触网使用激振器给其施加一定形式和大小的振动量激振1,并同时控制移动小机器人按照预定的时间和固定的速度从起点依次通过检测点直至终点,并依次将测得数据传输给下位机进行显示,人工记录下每个检测点的振动频率。再利用无线遥控将巡检机器人重新移动到起点,给予接触网另外4 种不同的激振2~4,重复以上的实验3次并完成数据的记录,对比两组实验发现两组测得频率值有一定的差距,但检测点3 处的振动频率值相较于其他检测点都要小,以跨距为6 m 的接触网对应检测点振动频率的结果为例,其最终结果如图9 所示,根据曲线图发现检测点3 处的振动频率均比较小,由于当有破损时,引起共振的振动部分就会变长,带动了频率变慢,从而可以初步判断检测点3 处有破损,后期还可以根据测量的振动频率为评估接触网的健康状态提供重要的参考依据。

图8 巡检机器人与实验测试现场图Fig.8 Inspection robot and experimental test field diagram
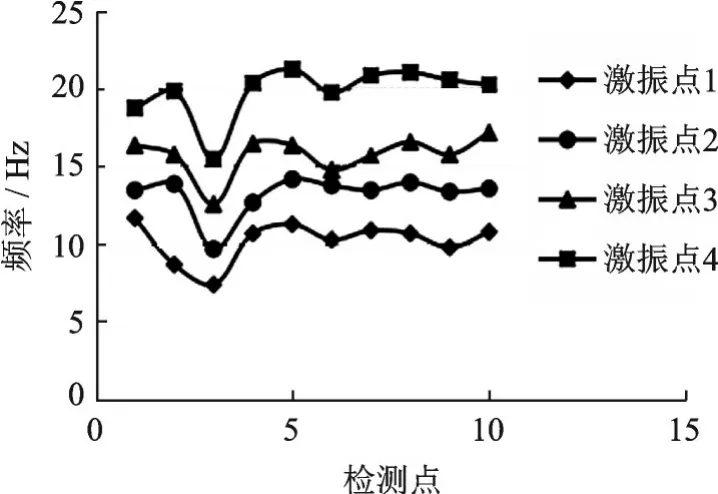
图9 不同激振下铁路接触网线的振动频率曲线图Fig.9 Vibration frequency curves of railway catenary cables under different excitations
6 结束语
本文通过设计的检测控制系统来完成铁路接触网振动频率检测工作,并结合接触网的模态分析初步判断铁路接触网的健康状态。与传统的人工检测和图像检测方法相比,上述设计结构简单,不需要复杂的仪器就可完成对铁路接触网振动频率的检测任务,有效地降低检修成本,而且操作简单,大大减轻了检修人员的工作难度,提高了检修工作效率。另外本文设计的机械装置可以根据接触网的实际检测要求在其安装平台上装配不同检测设备对相应零部件进行检测,从而得到所需接触网的参数特性,使得该装置具有很好的通用性。虽然该检测系统通过硬件和软件滤波以及结合最小二乘法引入修正值等方法减少了系统的随机误差和系统误差,但是仍不可避免地存在着一定系统误差,需要引入灰色预测GM(1,1)模型[20]进行误差补偿来进一步减小误差,但本文设计的检测控制系统基本也达到了预期的检测效果。总之,本文的设计是将传统检测技术与无线通信技术进行融合,初步建立了一套融合检测数据与无线通信相互支撑的检测体系,对于提高电气化铁路接触网检测的检测效率以及铁路接触网检测技术的研究具有很重要的现实意义和参考价值。