利用多普勒测量确定嫦娥四号着陆器精密定轨
2020-08-11曹建峰段建锋
曹建峰,张 宇,陈 略,段建锋,鞠 冰,李 勰
(1. 航天飞行动力学技术重点实验室,北京100094;2. 北京航天飞行控制中心,北京100094)
0 引 言
月球自转与公转速度相当,该特性使得月球始终以固定的一面指向地球[1]。为了提升对月球背面的认知,历史上多颗探测器开展了月球背面的遥感探测[2-4]。受限于测控能力,早期月球的着陆探测仅停留于月球的正面[5]。2018年5月21日,嫦娥四号中继卫星成功发射,并于同年6月14日进入位于地月拉格朗日L2点的使命轨道,具备为月球背面的着陆探测提供数传服务的能力[6]。嫦娥四号的科学探测目标包括:低频射电天文观测、月表浅层结构探测以及形貌与矿物组成探测等[7]。
轨道计算是月球探测任务及科学探测活动实施一项关键技术,多普勒测量在环月探测器的定轨计算中一直扮演着重要角色。20世纪70年代,Muller等[8]利用Lunar orbiter 1~5的S频段多普勒测量数据进行月球重力场研究,发现了质量瘤分布。Lunar Prospector探测器的多普勒测量精度为0.2 mm/s(10 s积分周期),2011年发射的GRAIL-A,其轨道计算也主要依赖于X频段的多普勒数据,其测量精度为0.03 mm/s(10 s积分周期)[9]。
中国探月工程以地基USB/UXB(嫦娥一号、嫦娥二号,嫦娥四号中继星采用S频段,其余探测任务采用X频段),天文VLBI测量完成月球探测器的测轨工作[10-11]。受限于测量数据的精度,嫦娥一号任务的轨道计算主要使用国内测站USB测距与VLBI时延、时延率测量数据[12],实现了环月阶段优于50 m的轨道精度。在探月工程的系统建设中,VLBI技术取得了长足进步[13-14]。嫦娥二号任务中,开展了深空相位测量试验,获取了约0.1 mm/s测量精度的多普勒数据(30 s积分周期)[11],为我国自主高精度多普勒测量奠定了基础。嫦娥三号任务中,X频段的双差多普勒测量精度为0.2~0.4 mm/s(10 s积分周期),三程多普勒测量精度大约为0.3~0.5 mm/s(10 s积分周期)[15]。
嫦娥四号着陆器采用X频段测量体制,测轨系统延续USB与VLBI模式,得益于设备的改造,多普勒测量精度得到进一步提升。本文对嫦娥四号着陆器环月飞行阶段的测轨数据进行处理,分析多普勒数据对轨道计算的贡献。
1 嫦娥四号任务概况
2018年12月8日,嫦娥四号着陆器搭载长征三号乙(CZ-3B)运载火箭从西昌卫星发射中心发射,历经发射段、地月转移段、环月飞行段后,12月12日进入环月轨道,2019年1月3日在距离月表15 km处实施动力下降,进行软着陆。
嫦娥四号着陆器延续了嫦娥三号姿控模式,通过姿控发动机喷气维持姿态稳定。环月飞行阶段,着陆器采用环月飞行姿态,其-Y轴与月球自转轴夹角偏差为8°,+X轴与太阳方向矢量夹角大约6°。当姿态偏移超过设计阈值,姿控发动机进行喷气调整姿态。虽然姿控发动机设计为力偶模式,实际工作状态下仍会对着陆器产生一定的加速度,影响着陆器的飞行轨迹。此外,着陆器还需要判断是否需要姿态调整转动角以满足测控要求,即对日定向偏置,该动作也会对着陆器产生作用力。嫦娥三号的分析表明,环月飞行阶段,姿控喷气对1天的轨道预报精度影响大约为50 m[16],因而任务实施期间并不考虑姿控喷气对轨道计算与预报影响。
嫦娥四号着陆器携带有X频段应答机,地基UXB设备跟踪着陆器获取观测数据包括测距与测速(1 s积分周期)数据,中国VLBI网参与着陆器的跟踪,准实时提供时延与时延率观测数据。
2 多普勒观测模型
为了满足高精度多普勒数据的应用需求,轨道计算软件中的多普勒建模采用基于泰勒展开的算法,使用月球、着陆器的速度与加速度信息,有效降低字长截断误差、行星星历表插值误差对多普勒建模精度的影响[17]。算法本质是对积分开始与积分末端的信号传播距离的差分计算进行了改进。信号传播距离的计算公式为,
(1)
(2)
式中:l表示信号的传播距离,下标s,e分别表示积分开始与积分结束,rE表示质心天球参考系中的信号收(发)时刻地球的位置矢量,rsta表示测站的天球参考系位置矢量,rM表示信号转发时刻月球的位置矢量,rsc表示探测器在月心天球参考系中的位置矢量,传播距离的计算需要进行光行时迭代。
(3)
式中:x,y,z为r的坐标分量,Δx,Δy,Δz为Δr的坐标分量。则积分结束与积分开始的信号传播距离差分可以表示为:
(4)

为避免计算精度损失,式中ΔrE与ΔrM使用质心天球参考系中地球与中心天体的速度计算,
(5)
3 基于多普勒测量的轨道计算
为分析多普勒数据的独立定轨能力,仅选用嫦娥四号环月阶段的多普勒数据进行轨道解算。定轨计算中,为便于残差统计与轨道比较,定轨弧段选取为每日0时至次日4时,共计28 h数据。在环月飞行阶段,嫦娥四号除了常规的姿控喷气外,还进行了多次的对日定向偏置,以及轨道控制。因此,28 h的定轨弧段内如果发生了轨道机动或是对日定向偏置之类的间断力,则对该过程产生的加速度进行解算。定轨计算中采用匀加速度模型对此类间断力进行建模,假定该作用力对探测器产生的加速度在轨道坐标系中恒定。表1给出了定轨计算所使用的基本策略。
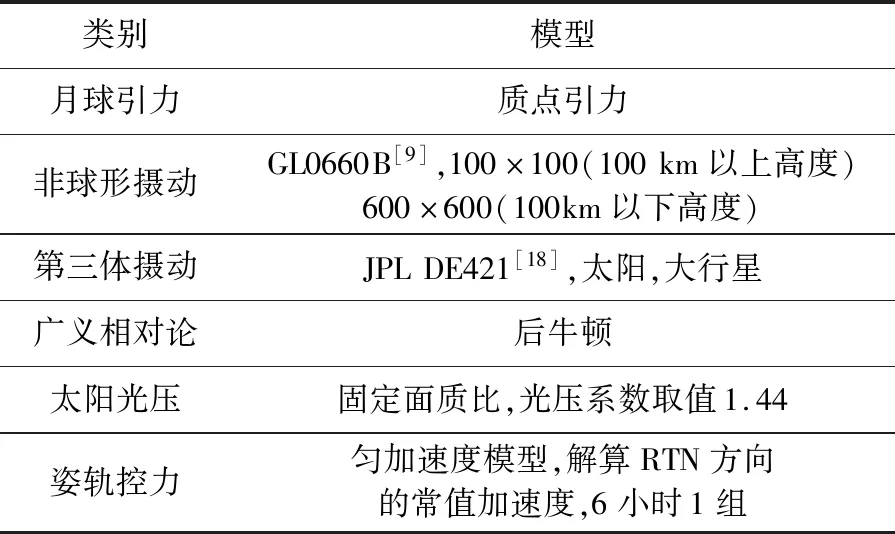
表1 定轨计算策略Table 1 Orbit Determination Strategy
3.1 定轨残差统计
中国深空网的3个测站参与跟踪嫦娥四号着陆器,其中佳木斯天线口径为66 m,喀什35 m以及南美35 m天线[19]。对3个测站每天多普勒数据的定轨残差进行统计,图1给出了每个深空站多普勒数据定轨残差RMS每日统计值。

图1 深空站多普勒数据残差RMS统计Fig.1 RMS of DSN doppler residuals
3.2 重叠弧段轨道比较
选取每日1时至3时共计2 h的重叠弧段进行轨道精度比较,以降低边值效应产生的影响。图2给出了环月阶段每天定轨星历的重叠弧段比较。12月30日着陆器实施降轨控制,由100 km圆轨道降低至100 km×15 km轨道,期间还有频繁对日定向偏置,因而这两天的重叠弧段轨道比较结果稍差,但优于50 m,其余阶段的重叠弧段总体偏差小于35 m,轨道偏差小于20 m的有10个重叠弧段。
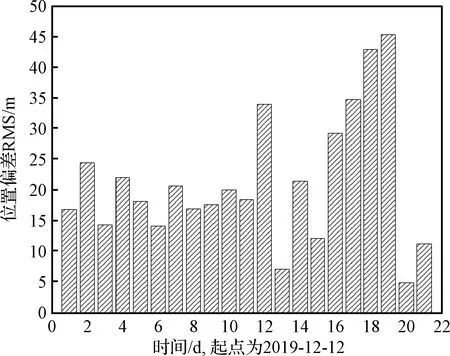
图2 多普勒解算轨道重叠弧段比较精度统计Fig.2 Overlap comparison of doppler-only orbits
3.3 考虑姿控喷气的轨道计算
着陆器依靠姿控发动机喷气维持姿态稳定,所产生的作用力并非严格力偶,对质心产生一个细微加速度。对于频繁姿控喷气的飞行阶段,该作用力会对轨道产生影响,若在定轨计算中完全忽略姿控喷气的影响,会导致测轨数据的拟合较差,残差呈现与轨道周期相一致的周期性。为了降低该作用力对轨道计算的影响,定轨计算中对频繁姿控的弧段进行加速度估计,姿控力建模采用匀加速度模型,每6 h 解算一组轨道坐标系的常值加速度。
选取12月28日至29日(100 km轨道高度)连续2 d的数据进行分析,这2个弧段内着陆器未实施对日定向偏置,但姿控喷气持续发生,轨道相对稳定。图3~图4给出了2 d定轨计算残差图,(a)部分为未进行姿控力解算,残差存在明显的周期项,(b)部分为解算姿控力后的残差。通过姿控力的解算,数据残差的周期性得到显著抑制,噪声水平大幅降低。
图3 12月28日多普勒数据定轨残差Fig.3 Postfit doppler residuals on December 28
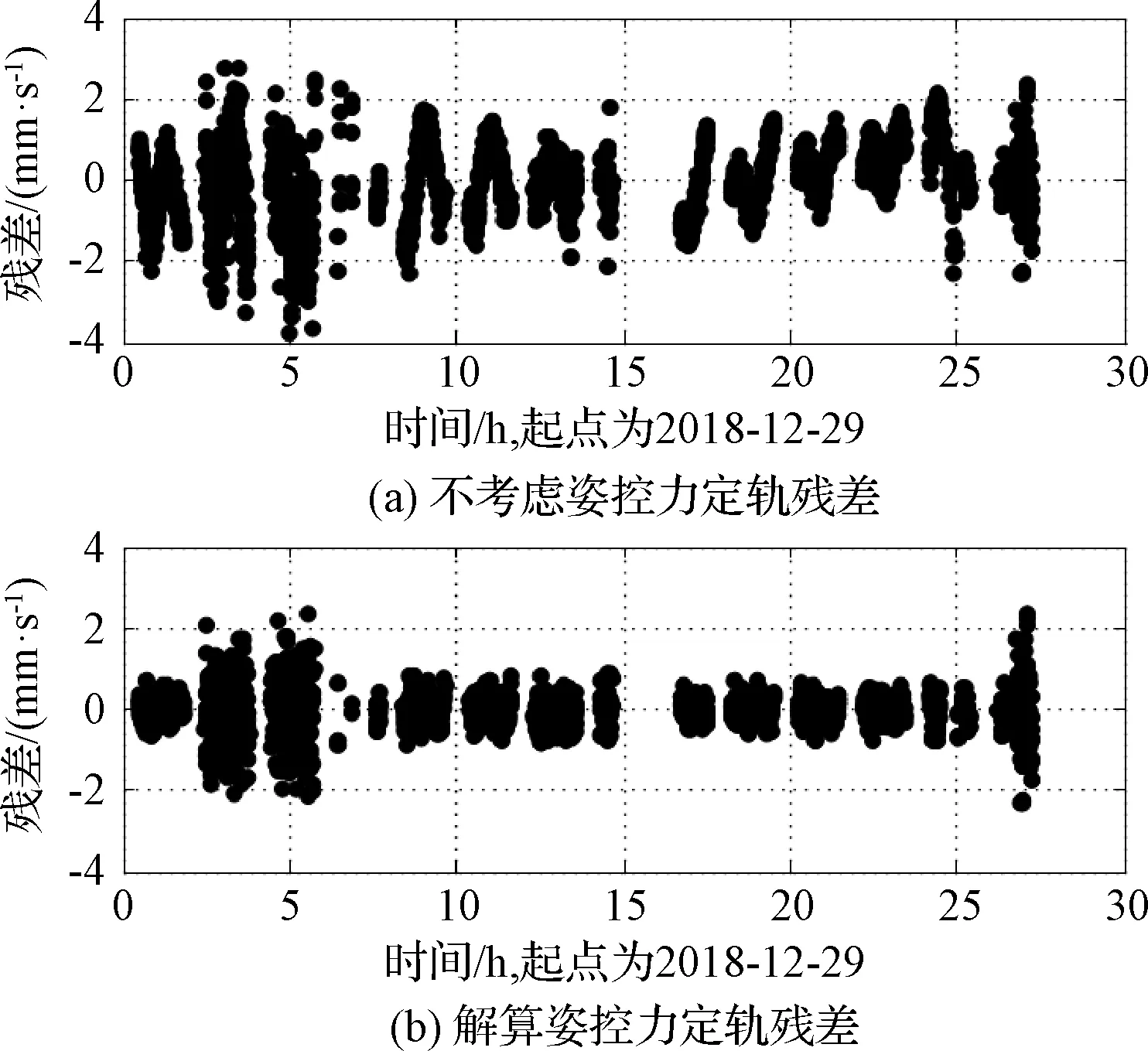
图4 12月29日多普勒数据定轨残差Fig.4 Postfit doppler residuals on December 29
对100 km×15 km轨道高度的轨道,选取2019年1月1日与2日两天的数据分别进行分析,图4~图5为残差分布。通过姿控喷气力的解算,1月1日南美与佳木斯测站数据残差的RMS降低1倍,喀什站数据残差的RMS由0.99 mm/s降低至0.87 mm/s。1月2日,南美与佳木斯多普勒数据残差RMS降低1倍,喀什数据RMS由2.0 mm/s降低至1.2 mm/s。与100 km×15 km高度轨道相比,100 km×15 km阶段姿控喷气更为频繁,高阶重力场的不准确对轨道的影响也更为显著,因而姿控力的解算可以得到更为明显的残差拟合结果。

图5 1月1日多普勒数据定轨残差Fig.5 Postfit doppler residuals on January 1
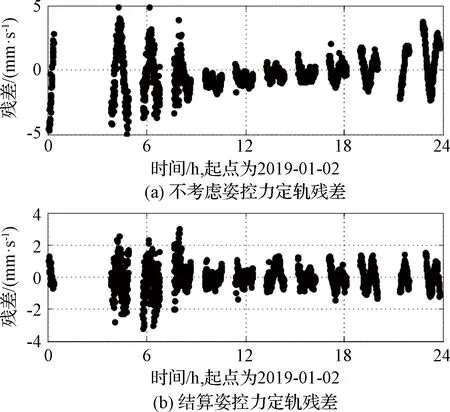
图6 1月2日多普勒数据定轨残差Fig.6 Postfit doppler residuals on January 2
以解算姿控力的轨道为基准,不解算姿控力的轨道作为比较轨道,分析姿控力解算对轨道计算的影响。100 km高度轨道,2组策略解算轨道的差异小于20 m;100 km×15 km轨道,2组策略解算轨道的差异小于50 m(如图7~图10所示)。对100 km×15 km轨道,轨道的偏差与姿控力解算的分段存在相关性。比较2组策略解算轨道的协方差,解算姿控力后的数据残差虽然变小,但是解算轨道协方差并没有显著降低,甚至变大。如1月2日(如图10所示),不解算姿控力的轨道形式误差为7.2 m,解算姿控力后的轨道形式误差为13.1 m,姿控力的解算可能会增大轨道参数的协方差,即可能得到更差的解算轨道。
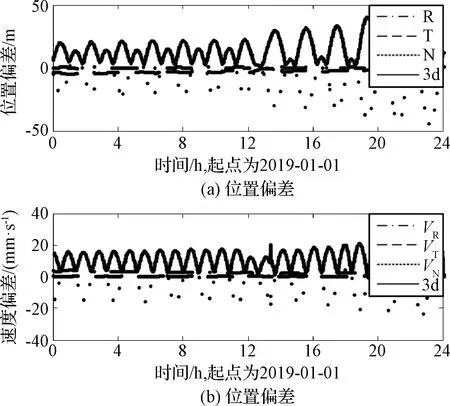
图9 1月1日解算轨道比较Fig.9 Orbit solution comparison on January 1
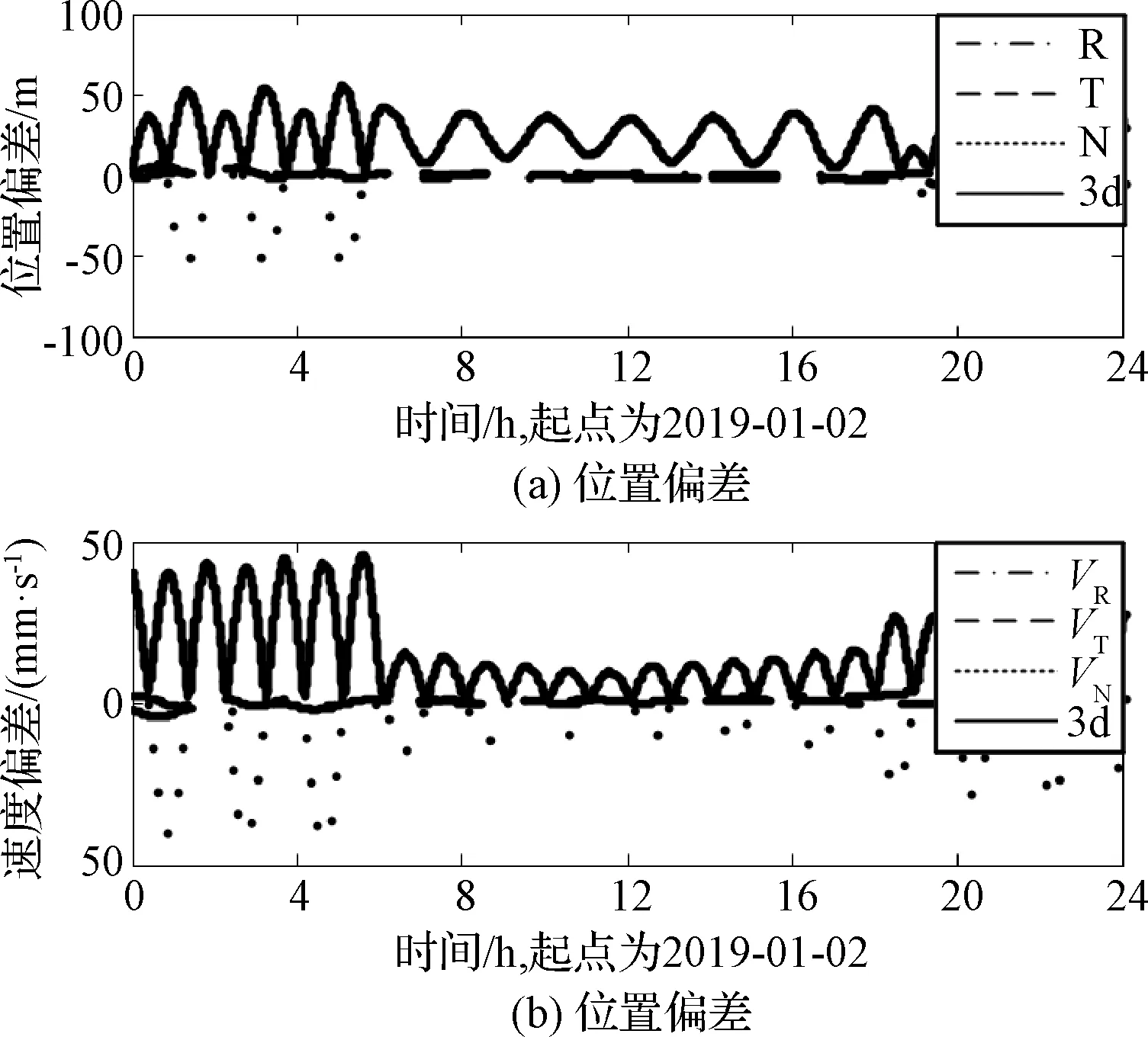
图10 1月2日解算轨道比较Fig.10 Orbit solution comparison on January 2
4 基于测距+VLBI解算轨道的比较
本节对环月阶段不同高度的轨道分别进行定轨计算,以基于测距和VLBI数据的解算轨道作为基准,检验多普勒数据独立定轨的精度。
测距与VLBI联合解算的轨道精度在历次月球探测任务中得到了验证,其精度可以稳定在10~50 m,图11给出了使用USB测距与VLBI数据计算轨道的重叠弧段比较,定轨策略如表1所示。

图11 基于测距与VLBI解算轨道的重叠弧段比较Fig.11 Overlap comparison of ranging+VLBI orbits
以测距与VLBI解算的轨道作为基准,比较每天多普勒解算轨道与基准轨道的差异,并统计RMS,结果显示2种数据源解算轨道有较好的一致性(如图12所示),两者的差异小于40 m(2组结果小于70 m)。
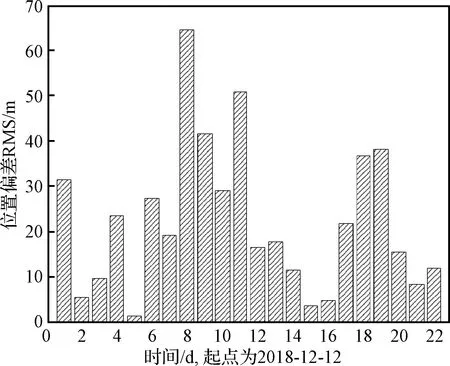
图12 多普勒定轨与测距+VLBI定轨的比较Fig.12 Comparison of doppler-only and ranging+VLBI orbits
5 结 论
对嫦娥四号着陆器环月阶段的多普勒测量数据进行处理。中国深空网佳木斯与南美测站的多普勒测量数据精度水平相当,定轨残差RMS大约为0.3~0.8 mm/s,喀什站数据精度水平稍差,大约为0.6~1.2 mm/s。频繁的姿控喷气及对日定向偏置对着陆器产生细微的加速度,对轨道计算会产生20~50 m的影响。通过重叠弧段轨道比较,基于多普勒数据独立解算轨道的三维精度为5~50 m。通过与测距及VLBI解算的轨道进行比较,两种数据源解算轨道精度相当,整体差异为小于50 m。
