机器人辅助人工全髋关节置换的短期疗效分析
2020-08-10张卓孔祥朋杨敏之郭人文宋平吴东陈继营柴伟
张卓 孔祥朋 杨敏之 郭人文 宋平 吴东 陈继营 柴伟
人工全髋关节置换术(total hip arthroplasty,THA)被誉为上世纪最成功的外科手术,能获得优异的满意度和中远期效果[1⁃2]。虽然相对于其他部位的关节置换,髋关节假体对安放角度和位置的包容性相对更高,但合理的假体选择和准确的假体植入仍然是假体远期在位的前提。无论是否使用组配式髋关节假体,髋关节不稳定和假体无菌性松动均在髋关节翻修的原因中排名靠前[3],且髋关节翻修所引发的临床和社会经济负担均高于膝关节翻修手术[4]。
机器人辅助手术能够提高人工关节置换的精准性,降低并发症的发生率[5⁃7]。然而,机器人辅助THA与传统手工操作截然不同,手术医生需要熟悉操作系统从而逐渐度过学习曲线[8]。一些研究认为,对于经验丰富的骨科医生,机器人辅助手术系统并没有获得更好的手术效果[5,9]。
本研究对我科所进行的机器人辅助THA 手术进行了回顾性分析,并与传统徒手操作进行对比,评价机器人辅助THA手术的精准性和安全性。
资料与方法
一、纳入与排除标准
选择我中心自2018 年8 月至2019 年3 月的前100例机器人辅助THA手术病例进行回顾性研究。
纳入标准:①采用标准髋关节后外侧入路;②接受Trident 髋臼假体或Accolade 股骨柄假体(史赛克公司,美国)行THA手术治疗;③使用MAKO机器人辅助手术系统配合手术。
排除标准:①神经肌肉功能不全者(如麻痹、肌溶解或外展肌无力);②精神异常者;③酗酒者或吸毒者、药物滥用者;④身体质量指数(body mass in⁃dex, BMI)>35 kg/m2;⑤髋关节周围有严重的骨质疏松、代谢性骨病、放射性骨病、肿瘤;⑥不配合术后康复锻炼者;⑦术后影像学检查不符合评价标准(非标准正侧位,无法对髋臼角度进行精确测量);⑧其他研究者认为不适合本临床试验的情形。
同时选择同时期由同一医师施行的徒手THA病例纳入对照组。
二、一般资料
机器人辅助组共纳入79 例(100 髋),其中,男47 例,女32 例;年龄为(52.49±11.00)岁;BMI 为(24.88±3.18)kg/m2;术前髋关节Harris 评分(hip Harris score, HHS)为(40.06±16.01)分;术前活动度为73.17°±18.58°。股骨头无菌性坏死51髋,髋关节发育不良(DDH)39髋,股骨头头骺滑脱4髋,股骨颈骨折2髋,原发性髋关节骨关节炎2髋,创伤后髋关节骨关节炎2髋。
对照组共纳入80 例(100 髋),其中,男40 例,女40 例;年龄为(51.89±12.64)岁;BMI 为(24.24±3.03)kg/m2;术前HHS 为(38.24±15.44)分;术前活动度为74.94°±19.22°。股骨头无菌性坏死53 髋,DDH 36 髋,股骨头头骺滑脱3 髋,股骨颈骨折1 髋,原发性髋关节骨关节炎2 髋,创伤后髋关节骨关节炎5髋。
两组病人的上述各项一般资料比较,差异均无统计学意义(P均>0.05)。
本研究经我中心伦理委员会批准进行。
三、机器人辅助手术设计和术前准备
机器人辅助THA 手术采用MAKO 骨科手术系统,使用Trident 髋臼杯和Accolade Ⅱ股骨柄(史赛克公司,美国)。病人术前均进行双髋关节CT扫描,并将Dicom数据导入MAKO系统生成三维模板。手术医生在术前基于该三维模板调整髋臼杯的尺寸和空间位置。术前设定髋臼杯的外展角和前倾角分别为40°和20°。股骨柄的规划按照最优骨性接触、下肢长度和髋关节偏心距进行综合规划。
四、机器人辅助手术操作及术后处理
所有手术均由同一手术组参与完成。安装骨盆定位器后,选用标准髋关节后外侧入路。在脱位髋关节前,捕获股骨近端和远端定位点(图1 a),记录术前下肢长度和髋关节偏心距。接下来脱位髋关节并进行股骨颈截骨。分别标记髋臼后缘、前缘和上缘定位点,然后完成共32个微调定位点的注册。在触觉反馈机器臂的辅助下,按术前规划进行髋臼磨锉(图1 b),安装髋臼杯至术前规划位置(图1 c)。显露股骨近端,徒手扩髓并安装股骨柄试模,复位确认髋关节稳定性和活动度,记录下肢长度和髋关节偏心距定位点,最后安装股骨假体。手术医生依据术中所见进一步对髋臼杯位置进行微调,进而优化髋关节的活动范围和稳定性。

图1 术中操作:机器人辅助髋臼定位(a)、磨锉(b)和假体植入(c)
术后常规给予病人抗感染及抗凝等治疗,并给予病人多模式镇痛和快速康复指导。所有病人手术次日可扶双拐下地部分负重。
五、观察指标和随访
所有术前和术后测量均由2名受过培训的主治医师或高年资住院医师分别进行。测量的影像学结果已去除了所有的病人信息。测量结果取两次评估的平均值。如果两次测量的差异较大(超过10%),则由另一名高年资主治医师或高级职称医师进行第3次测定后,取较为相近的2次结果的平均值。对指标进行评价的医师均未参与入组病人的手术治疗。
(一)围术期资料
收集病人的年龄、性别、BMI、术前诊断、术前和术后活动度(定义为患侧髋关节最大屈曲和后伸角度差)、围手术期并发症、术后3 个月HHS、术后住院时间和手术时间(按照切开皮肤至缝合结束时间计算)。
(二)影像学资料
基于术后即刻拍摄(手术室术后拍摄)的骨盆前后位X 线片测量下肢长度差异(limb length discrep⁃ancy,LLD),即双侧小转子与双侧泪滴连线垂直距离差异。为了去除影像放大率所造成的误差,采用股骨头作为校准标准,如果泪滴或小转子在X 线片上难以辨认,则分别采用坐骨结节或大转子尖端替代。LLD超过10 mm被认为不可接受。当任意一侧股骨长轴与骨盆长轴之间的夹角超过10°,则认为该骨盆摄片不够标准,其测量所得LLD结果将被弃用。
(三)假体植入的精确性
采用Orthoview 软件系统(6.6.1 版本,Materi⁃alise,比利时)测量髋臼杯假体位置;将每例的前倾角和外展角与Lewinnek 安全区(外展角为30°~50°,前倾角为5°~25°)进行比对,验证假体安放角度。
外展角定义为髋臼杯长轴与双侧泪滴连线夹角,可接受范围为规划角度±10°。前倾角的计算采用髋臼杯阴影投照法,即前倾角=arc-sin(短轴/长轴),可接受范围为规划角度±5°。外展角或前倾角未进入可接受范围,则认为其放置角度不可接受。
六、统计学分析
采用SPSS 25.0统计分析软件(IBM公司,美国)进行统计学分析。手术时间、住院时间等符合正态分布的计量数据以平均值±标准差()表示,并采用Student'st检验进行分析比较。性别、术前诊断等分类数据的比较则选择Fisher精确检验或秩和检验。以P值<0.05作为统计学差异分界值。
结 果
两组术后临床资料的比较如表1所示。机器人辅助组和对照组的手术时间分别为(95.92±15.64)min、(83.12±18.22)min,机器人辅助组的手术时间明显长于对照组,两组间比较,差异有统计学意义(t=3.309,P=0.001);但是,随着手术例数的增加,机器人辅助组的手术时间呈现明显降低的趋势并逐渐趋于稳定(图2)。两组的术后HHS均较术前显著改善,手术前后数值比较,差异均有统计学意义(P均<0.05);但组间比较,差异无统计学意义(P>0.05)。两组住院时间比较,差异无统计学意义(P>0.05)。
表1 两组病人术后情况对比(±s)

表1 两组病人术后情况对比(±s)
组别机器人辅助组对照组t值P值髋数100 100--手术时间(min)95.92±15.64 83.12±18.22 3.309 0.001住院时间(d)3.30±0.51 3.79±0.67 0.358 0.721术后HHS(分)83.23±6.45 85.77±9.22 0.327 0.726前倾角19.05°±5.03°16.91°±5.48°2.877 0.004外展角41.14°±3.66°40.35°±6.57°1.050 0.295 LLD(mm)2.87±3.75 4.23±3.12 2.958 0.003偏心距差异(mm)3.34±1.79 3.98±2.04 1.455 0.147
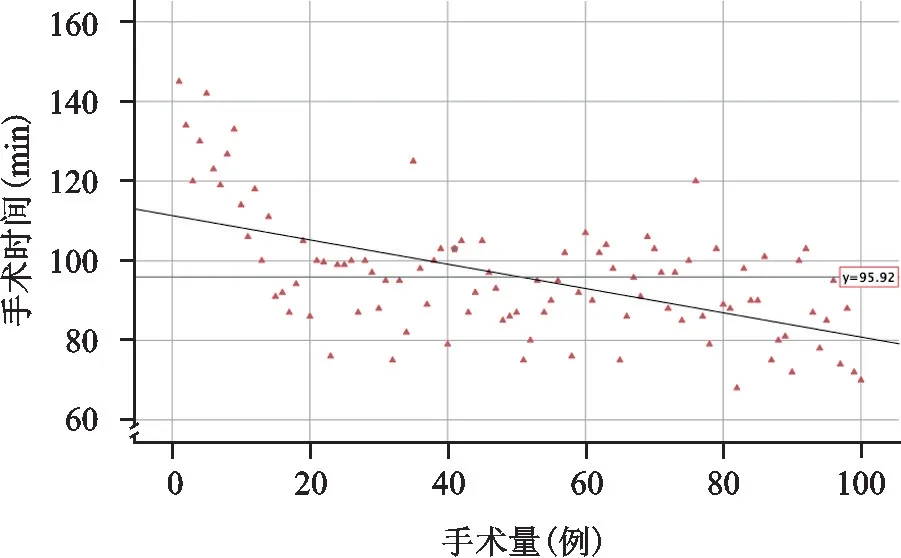
图2 机器人辅助组的手术时间统计:随着手术例数的积累,手术时间呈逐渐降低的趋势
机器人辅助组的前倾角、外展角、LLD和偏心距差异分别为19.05°±5.03°、41.14°±3.66°、(2.87±3.75)mm、(3.34±1.79)mm,对照组分别为16.91°±5.48°、40.35°±6.57°、(4.23±3.12)mm、(3.98±2.04)mm;两组的前倾角和LLD比较,差异均有统计学意义(P均<0.05),但两组间的外展角和偏心距差异比较,差异无统计学意义(P>0.05)。机器人辅助组有91髋(91%)位于安全区内,而对照组有82 髋(82%)位于安全区内(图3),两组比较,差异无统计学意义(χ2=3.468,P=0.063)。与对照组相比,机器人辅助组的假体安放角度更为精确,统计数据的离群值更少。

图3 两组术后的Lewinnek 安全区分布对比,图中红色矩形框代表Lewinnek 安全区,蓝色点为机器人辅助组的角度分布,红色点代表对照组的角度分布,图示机器人辅助组中位于Lewinnek安全区内的比例更高
病人术后均得到3 个月以上随访,未发生髋关节脱位、无菌性松动、假体周围感染或翻修。
讨 论
虽然科技发展带来了假体设计、固定界面和关节面的改进,但THA 术后机械性失效仍然时有发生,这种机械性失效通常由手术失误或病人解剖变异导致假体植入精准性不足所造成[3],同时也驱使了机器人辅助手术技术的发展。在一篇综述性研究中,Subramanian 等[9]认为,机器人辅助手术经过数十年的发展,已经能够获得可靠的精确性结果,并且将继续发展,但外科医生的经验和操作仍然至关重要。Perets 等[10]的研究也表明,机器人辅助THA 能够获得非常满意的短期效果,而且并没有增加并发症的发生率。在我们的研究中,机器人辅助THA手术的病人与常规手术病人相比,均没有出现明显的并发症。
大量文献已经报道了机器人辅助手术与徒手操作相比的精确性优势[5,7,11⁃14]。我们研究发现,采用机器人辅助进行髋臼杯的植入,能够获得更为精确的假体前倾角、更合理的下肢长度,并且其假体位置在Lewinnek 安全区内的比例更高,而其他的假体评价指标及病人评价指标并未见明显差异。考虑到本研究中施行机器人辅助手术和徒手手术的医生为同一高年资关节外科高级职称医师,其在长期的临床实践中所积累的经验和手感会提高徒手对照组的评价基线,可能会导致某些评价指标的差异并无统计学意义。其次,机器人辅助手术的手术时间明显长于徒手操作,这与机器人手术系统的参数设置需要耗费额外的时间相关。我们研究发现,随着手术例数的增加,手术团队对系统更加熟悉,手术所需时间呈现明显降低的趋势并逐渐趋于稳定。另外,与文献中所提及的问题一致,虽然早期的临床效果并未显示出机器人辅助手术的优势,但这种假体精确性优势是否会在远期随访中体现出来,仍然有待中长期随访结果的观察。
与所有外科操作相同,机器人辅助手术存在学习曲线。在我们之前的研究中已经证实,同一医师进行该手术的学习曲线为14例,在14例之后,该医师的手术表现即趋于稳定[15];同时对该手术医师在学习曲线中的病例和度过学习曲线的病例进行了对比,除手术时间存在明显差异外,所有病人的术后评价无明显差异,并且随着病例数的积累和对机器人辅助系统应用的熟悉程度提高,手术时间呈明显的降低趋势。而早期病例手术时间较长,与手术早期需要术者本人而非团队成员进行设定以及部分病例相关的定位器放置松动、髋臼注册失败等问题相关,这些问题度过学习曲线后均得到解决,使得机器人辅助THA的平均手术时间明显缩短。
本研究也存在一定的局限性。首先,回顾性研究的特性使得研究结果的证据等级低于前瞻性研究,对此,我们设定了较为严格的纳入排除标准,规范化并提高术后影像学检查的质量,且由未参与手术的医师进行影像学和疗效评价,在一定程度上降低了偏倚。另外,本研究为单中心、单术者的队列性研究,如前所述,施行手术的医师具有丰富的关节外科手术经验,使得对照组的基线值较高,可能会对某些指标的对比产生影响。另外,本研究为短期疗效研究,研究结果与国际上已发表的主流文献一致。但据我们所知,本研究是国内关于机器人辅助手术样本量最大的研究[16⁃17]。后续仍需要进行前瞻性多中心对照研究,对该技术的中远期疗效进行进一步的评价。
机器人辅助THA 能够提供更为精准的髋臼杯假体植入,而且并未增加手术的并发症发生率。但机器人辅助手术需要团队医生精密的术前规划、对机器人辅助系统的操作高度熟悉以及手术的熟练配合才能完成。
