分布式多站雷达协同定位功率分配改进凸松弛算法*
2020-08-10陈志峰
陈志峰,左 燕
(杭州电子科技大学信息与控制研究所,杭州 310018)
0 引言
分布式多站雷达系统利用多个分散在不同空间的发射站和接收站对目标协同定位和跟踪。如何充分利用多雷达组网的有限资源提高目标的定位[1-3]和跟踪[4-8]精度,已经成为一个重要的研究方向。理论上,分布式多站雷达系统中各部雷达的发射功率越高,目标的定位和跟踪精度就越高。然而实际中,分布式多站雷达系统在对目标定位时发射机总功率有限,需要通过优化功率分配以提高在系统发射总功率有限情况下的目标定位精度。
Godrich 首先提出了分布式多站雷达目标定位下功率分配方法[1,9]。该方法通过凸松弛和域分解方法求解非凸优化问题。其中凸松弛算法简单,计算速度快,但是得到的松弛解与最优解之间存在较大的误差。文献[9]提出基于KTT 条件和域分解的优化方法,该方法将问题分解为多个子问题,通过综合各子问题的最优解获得功率分配问题的最终解。该算法能得到最优解,但计算耗时。文献[10]提出了一种自修正凸松弛算法,该算法对凸松弛算法进行改进,通过CVX 优化软件包经过多次迭代来逐步逼近最优解,但凸松弛参数较难选择,且最终结果受参数影响很大。
对此,本文提出一种改进凸松弛启发式算法求解非凸功率分配模型。该算法采用快速功率调整策略优化功率分配,并以此确定凸松弛参数,通过迭代修正松弛参数以实现分布式多站雷达在功率有限情况下的优化分配。
1 问题描述


接收雷达n 从发射雷达m 处获得的观测信号rm,n可表示为:


式中,CRLB 矩阵中各元素dm,em和qm形式如下:
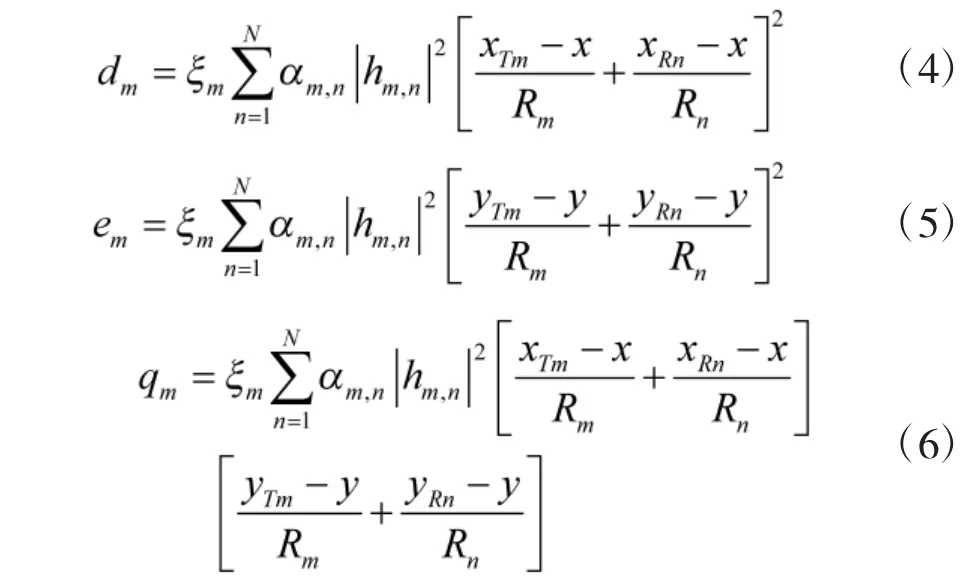
则CRLB 的迹表示目标位置估计之和的下界,具体为:

2 基于改进凸松弛的功率分配
2.1 基于CRLB 的功率分配模型
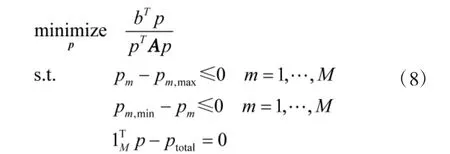
以CRLB 的迹为代价函数,在满足总功率约束的前提下,优化分配各部发射雷达的功率以提高目标的定位精度,给出分布式多站雷达功率分配模型具体如下
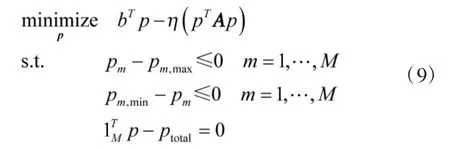
采用松弛技术将式(8)问题转化为如下形式
2.2 改进凸松弛启发式算法



则第k 次迭代组合(i,j)功率调整优化问题描述为


3 仿真结果与分析
为验证文本所提出的改进凸松弛算法的性能,研究两种布站场景下的功率分配。图1 给出了两种不同场景的目标与雷达发射站和接收站位置关系,目标位置均为(0,0)。图1 中(a)为一个分布式场景,发射站和接收站均匀分布在(-4 000,4 000)的范围内;(b)为一个集中式场景,发射站和接收站均匀分布在(1 5 00,4 000)的范围内。

图1 分布式多站雷达收发站与目标位置关系
图2 给出了两种布站场景下3 种功率分配方法下目标定位性能。由图2 可知,分布式布站场景下3 种功率分配算法目标定位性能优于集中式布站场景下3 种算法目标定位性能。随着分布式多站雷达系统总功率增加,系统可用的能量越多,3 种功率分配算法下目标定位误差逐渐减小。当总功率达到最大400 kW 时,各部雷达发射功率约束均能满足,3 种功率分配算法下目标定位性能接近。当系统总功率较小时,能量资源受限,本文提出的改进凸松弛算法优于凸松弛算法[8]和均匀分配算法。
图3 和图4 分别给出了本文提出的改进凸松弛算法和凸松弛算法[8]下功率分配结果。当系统总功率较低时,可分配功率较少,凸松弛算法优先分配给最佳发射站,如分布式场景(图3(a))中发射站1 和发射站4 满额分配,集中式场景(图4(a)))中发射站1 和发射站5 满额分配,而改进凸松弛算法通过功率调整和逐步修正松弛参数减小目标定位误差。随着系统发射总功率增加,其他发射站功率也逐渐增加。当雷达发射总功率较大时,大部分发射站功率接近各自的发射功率上限,两种分配算法下目标定位精度接近。

表1 改进凸松弛启发式算法
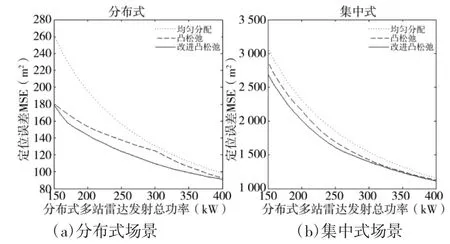
图2 3 种功率分配方法下目标误差比较曲线
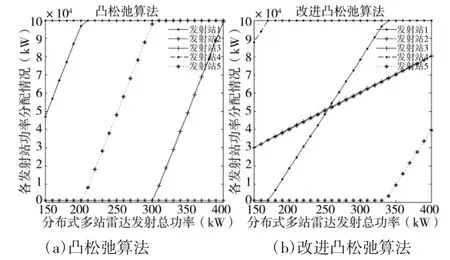
图3 分布式场景下各发射雷达功率分配结果
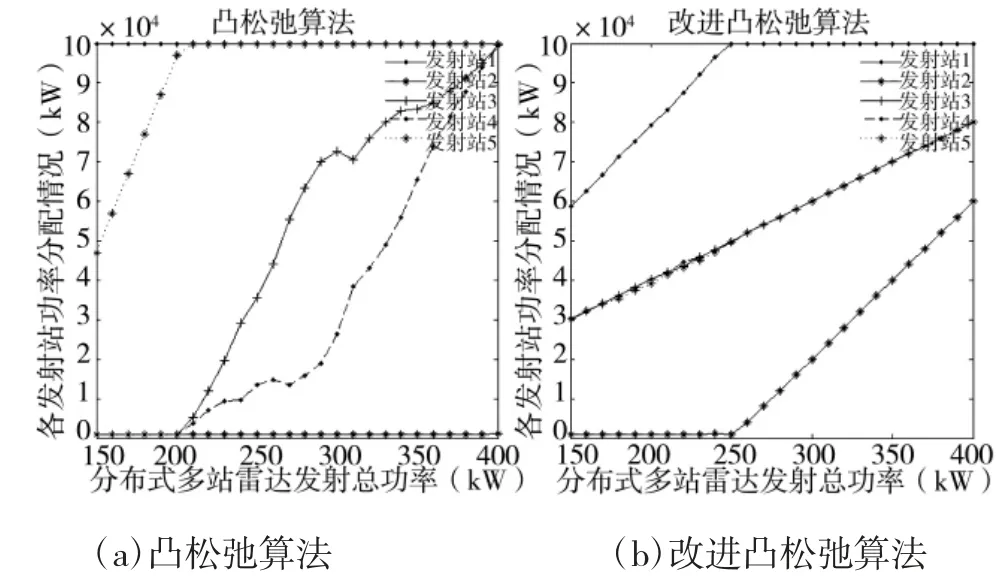
图4 集中式场景功率分配结果
4 结论
本文针对分布式多站雷达下的功率分配问题,提出一种改进凸松弛启发式算法,目的是协调各部雷达的发射参数使其在资源有限约束下达到更好的定位性能。仿真结果显示,本文提出的改进凸松弛启发式算法的目标定位性能优于功率均匀分配算法和传统凸松弛算法,能够实现分布式多站雷达在功率有限情况下的优化分配。与其他算法相比,本文提出的算法有如下优点:1)通过快速功率调整策略提高协同定位性能,大大减少计算量,适于实际工程应用;2)根据快速功率调整的结果确定凸松弛松弛参数,使松弛参数逐步逼近理论最优解,从而减少松弛后优化问题解与原问题解的误差。在此基础上,考虑分布式雷达目标联合跟踪检测下功率分配是下一步研究的方向。