潜艇目标态势对航空磁探测的影响分析*
2020-08-10李启飞韩蕾蕾杨日杰
李启飞,韩蕾蕾,熊 雄,周 烨,杨日杰
(海军航空大学,山东 烟台 264001)
0 引言
在潜艇搜索过程中,磁探潜在当今的反潜作战中,发挥着重要的作用[1]。目前,国内外对航空磁探潜领域的研究主要集中在潜艇磁模型的建立[2],潜艇磁场向上、向下、同平面的延拓[3-4],潜艇信号的检测[5-6],磁探仪性能建模[7]等方面。在对磁探潜过程中的影响因素进行考虑时,国内学者对潜艇航向[8]、航速[9],反潜平台运动态势[10-11]对磁探潜结果的影响进行了研究。
事实上,在实际作战过程中,敌潜艇出现在我国海域的位置是随机的,且由于地磁场在我国分布差异大,因此,对不同海域地磁场环境下的潜艇磁异信号进行仿真是有必要的。此外,国内学者在对磁异信号进行仿真时,并未考虑潜艇运动因素,本文提出将潜艇运动态势(航向、航速)纳入磁异信号仿真模型中,对其进行了定量分析。
1 模型建立
1.1 地理北、磁北坐标系
依照图1 建立地理北坐标系,地理北方向为x轴,垂直方向为z 轴,根据右手坐标系原则选择y轴;同时建立地磁坐标系,磁北方向为x'轴,垂直方向为z'轴,根据右手坐标系原则选择y'轴。x 轴与x’轴夹角为D,磁倾角为I,HEX为地磁场HE在x 轴的投影,HEY为地磁场HEX在y 轴的投影。
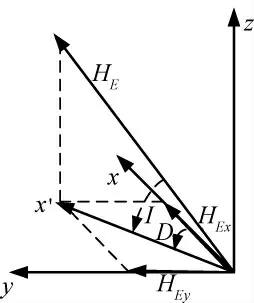
图1 地理北、磁北坐标系
1.2 磁异信号模型
1.2.1 磁体模拟法建立潜艇磁场
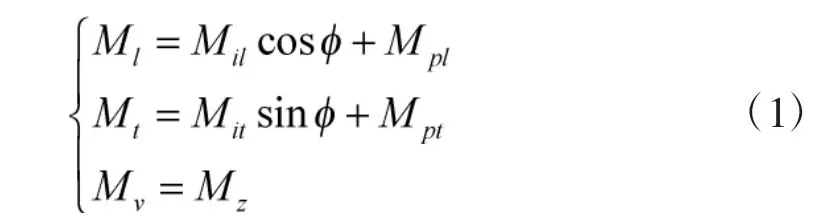
目标的磁矩分为纵向分量ml、横向分量mt、垂直分量mv。潜艇在建造过程中,不可避免地产生了固定磁场。潜艇在地磁场作用下产生的感应磁场,将随潜艇运动而变化[12]。因此,磁矩的各个分量ml、mt、mv又可以分为固定磁矩mpl、mpt与感应磁矩mil、mit。在进行探潜作业时,纬度变化不大,mv可不再分解为固定磁矩和感应磁矩,也无须考虑地磁场变化对磁矩垂直分量mv量的影响。各磁矩分量之间关系如下:
在磁偶极子模型下,航向对潜艇磁场作用如下:

其中,θ 为航向角(航向与地理北的夹角)。即潜艇磁场在地磁场方向上的分量与场点与潜艇的位置、潜艇航向角、磁偏角有关。
1.2.2 潜艇的标量磁异常信号

图2 地磁场、潜艇磁场关系、合成磁场关系
针对我国磁探反潜装备特性,本文主要从标量磁异常信号进行分析,如图2 所示,为磁探仪测得的地磁场信号,为测得矢量总场信号,为潜艇磁异常信号。其中

设潜艇在光泵磁力仪位置的标量磁异常信号为Bm,且

即测得的标量磁异常信号Bm为潜艇信号B 在地磁场HE方向的投影。
1.3 反潜机、潜艇相对运动的航线修正


图3 反潜机、潜艇相对速度图
潜艇在航行过程中,其航行速度为:

其中,α1为潜艇航向;反潜机在飞行过程中,其飞行速度为:

其中,α2为飞机航向。两者之间相对速度(relative speed)为:

易求得,在相对运动过程中,当潜艇相对静止时,反潜机航向相对于

根据上文对反潜机航向的修正,以潜艇为坐标系时,反潜机的修正航线,向潜艇航行方向的反向偏离α3。其飞行修正航线如图4 所示。

图4 反潜机修正航线图
2 磁异常信号仿真分析
目前航空反潜的磁传感器,主要是标量式光泵探头,探测由潜艇磁场造成的空间磁场异常值。本仿真基于潜艇磁偶极子模型,分析了潜艇的航速、航向、所处地理位置以及飞机巡逻航线对磁异信号的影响,仿真结果对目标的搜索、检测、识别提供依据。
相对于潜艇的主尺寸而言,当今潜艇只能在有限深度进行机动[13]。并且航空磁探过程时间持续较短,故将潜艇机动深度限定在某固定深度平面上进行仿真。
2.1 地理位置对磁异常信号的影响
在实际磁探测过程中,同样的潜艇态势,在不同的地磁场条件下,有着截然不同的磁异常特征。
根据地球主磁场模型(WMM2015)提供的数据,可以得到2018 年11 月14 日,渤海某海域(东经:120.84°北纬:38.3°)地磁场情况为:地磁场北分量Hx=28 900.3 nT,东分量Hy=28 900.3 nT,垂直分量Hz=44 247 nT,磁偏角D=-7.67°,磁倾角I=56.61°。黄海某海域(东经:122.67°北纬:37.74°)地磁场情况为:地磁场北分量Hx=29 437.6 nT,东分量Hy=-3 896 nT,垂直分量Hz=42 850 nT,磁偏角D=-7.82°,磁倾角I=55.21°。东海某海域(东经:122.68°北纬:30.84°)地磁场情况为:地磁场北分量Hx=33 199.9 nT,东分量Hy=-3 552 nT,垂直分量Hz=35 112 nT,磁偏角D=-6.1°,磁倾角I=46.44°。南海某海域(东经:112.71°北纬:16.61°)地磁场情况为:地磁场北分量Hx=39 650 nT,东分量Hy=-1 243.2 nT,垂直分量Hz=16 240 nT,磁偏角D=-1.79°,磁倾角I=22.27°。
仿真条件:潜艇航速Vs=6 kn,航向为地理南方向,磁矩各分 量mil=5×104A·m2,mit=0.27×mil,mpl=1.5×mil,mpt=0.18×mil,mv=0.85×mil。潜艇平面与反潜机平面距离h=300 m,磁探仪采样频率fs=100 Hz。

图5 不同海域的潜艇航向南航行时的异常平面图
仿真结果分析显示,不同海域的地磁场对航空磁异常信号影响较大。潜艇向南航行,在渤海某域,异常曲面为单峰,峰值为0.245 nT;在黄海某海域,艇艏附近为负峰,峰值为-0.218 nT,在艇尾为正峰,峰值为0.261 7 nT;在东海某海域,峰峰值仅为0.145 nT,波动较小;在南海某海域,负峰较为明显,为-0.319 nT,正峰为0.105 nT。

图6 飞机各航向的磁异曲线
图6 为反潜机过顶飞过潜艇的磁异信号曲线图,图6(a)~图6(d)为反潜机在各海域不同地磁环境下,沿各航向进行磁探反潜作业采集到的磁异常信号。由仿真可知,在不同海域航行的潜艇,在相同的航向态势下,目标信号强度有着明显的差异。
2.2 潜艇航向磁异常信号的影响


图7 南海海域潜艇各航向磁异常平面图
由仿真结果分析可知,在南海海域,潜艇在由北向南航行时,其西南方向出现逐渐变大的峰值。当潜艇偏东航行时,磁异曲面较为平坦,其峰峰值仅为0.091 2 nT;磁异信号峰峰值与航向角的关系如图8 所示,当航向角在[30°,180°]区间内,其峰峰值幅度较大,幅度在0.5 nT 左右;当航向角在[210°,360°]区间内,其峰峰值在0.1 nT~0.3 nT 左右。

图8 磁异常曲面峰峰值与航向角对应关系
将反潜机运动态势情况加入到仿真中,图9(a)~图9(d)分别是飞机向4 个航向以300 km/h 飞行,仿真得到潜艇各个航向测得的磁异信号数据。分析仿真结果,可以看出在该海域地磁场环境下,潜艇在东航向的磁异信号变化较为平缓,西、南航向变化较为剧烈,与上文仿真结论一致。

图9 南海潜艇各航向的磁异曲面
2.3 潜艇航速磁异常信号的影响
在以往的模型建立中,因为潜艇速度较小,并没有考虑到模型中去。但实际仿真发现,在特定条件下,潜艇航速会对磁异信号产生较大影响。
在南海某海域(东经:112.71°北纬:16.61°),当飞机向北航行进行磁探作业时,潜艇在不同航向、航速下航行,其仿真结果如下页图10 所示。仿真发现,当潜艇航向与反潜机航向一致或相反时,潜艇航速对磁异信号几乎没有影响,峰峰值稳定在0.316 nT;当潜艇航向与反潜机航向垂直时,潜艇速度对磁异信号影响较大,尤其在潜艇向西航行时,负峰幅度出现明显差异,峰峰值在0.03 nT~0.08 nT之间波动,且潜艇航速越高,峰峰值越大。
3 结论
本文使用磁偶极子模型,对潜艇的磁场进行仿真,并把潜艇的运动态势纳入磁异信号模型中,通过仿真得到了特定潜艇航向、航速、地磁环境下的飞机采集到磁异信号。仿真得到以下主要结论:
1)当潜艇航向与反潜机航向垂直时,潜艇速度对于磁异信号的峰峰值产生较大影响,磁异曲线峰峰值在0.03 nT~0.08 nT 之间波动。
2)不同地磁场环境对于磁异信号影响极大,在后续作潜艇磁异信号检测、识别时,要作为影响因素考虑在内。

图10 南海海域潜艇各航向各航速的磁异曲线
3)潜艇航向对于磁异探测有着极大影响,在南海某海域,当航向角在[30°,180°]区间,磁异信号为0.5 nT 左右,当航向角在[210°,360°]区间内,其峰峰值在0.1 nT~0.3 nT 左右。
本研究的下一步工作是将潜艇的规避模型考虑进去,增加潜艇运动维度,观察磁异信号特征。
磁异信号的差异是多变量因素造成的,势必要认清这些因素的作用效果,才能准确地进行下一步的潜艇磁信号的检测、识别。