基于心理防范区域在视频监控环境下的最优入侵路径
2020-08-03李培岳张鸿洲陈淼焱
李培岳, 张鸿洲, 陈淼焱
(1.中国人民公安大学研究生院,北京 100038;2.中国人民公安大学警务信息工程与网络安全学院,北京 102600; 3.中国人民公安大学公安遥感应用工程技术研究中心,北京 100038)
视频监控系统是安全防范系统重要的组成部分,城市视频监控系统在平安城市和智慧城市建设中发挥着至关重要的作用[1]。随着视频监控系统建设的深入,对视频监控系统的效能评估也在不断深入研究[2-3]。目前对视监控系统的评估研究多侧重于系统技术参数和性能的评估,一般是静态的不考虑人员动态活动的评估。这种评估方式虽然可以根据视频监控系统的不同任务、应用场景和环境对系统进行有效评估,但对人的行为特征没有进行有效分析。将视频监控抽象为隐形路障,如何对路面路径进行有效防范仍是视频监控系统建设、规划和评估的重要研究领域。
违法犯罪行为在预谋或发生时,行为人总会试图减少犯罪成本,而被发现即是增加犯罪成本的一个重要因素。在犯罪行为预谋或进行时,行为人总是要降低当时被发觉的可能性,也是想减少完成这样行为所必需的努力。因此一旦违法犯罪行为在实施过程中被发觉,行为人总是要努力做出反应,使被发觉所造成的影响降到最小。视频监控系统就是一双双从不闭合的眼睛,时时关注着各个摄像机监控覆盖的区域。虽然无法保证违法犯罪行为的发生过程都会记录在视频监控系统中,但是行为人在实施违法犯罪行为的前后,总会或多或少的出现在监控画面中。因此在行为人知晓视频监控系统存在的情况下,其在实施违法犯罪行为时总是在避免被监控探头拍摄到,或者使自己在监控图像上尽可能小或不易甚至无法识别。
将入侵路径定义为行为人实施违法犯罪行为的空间集合。犯罪行为在发生前,行为人一直处在入侵路径之上。在入侵路径上施以有效拦截可以阻止违法犯罪行为的发生。而在大多数情况下,在入侵路径上进行严格有效的物理拦截是不切实际的,因为无法对所有行为人在实施违法犯罪行为前实现完全掌控。根据通过环境设计预防犯罪(CPTED)理论,在入侵路径上施以影响可以增加犯罪成本[4-5]。视频监控系统就是在无数可能的入侵路径上施加的影响,从而增加了犯罪成本,即违法犯罪行为人的暴露成本。
在本文研究中,根据对视频监控系统宏观认知程度建立了视频监控系统的心理防范区域模型,在心理防范区域模型的基础上构建基于启发式算法的最优入侵路径模型,最后对在视频监控环境下的入侵者的入侵路径进行了实验分析。期望通过本文研究,可对视频监控系统在犯罪预防方面的评估分析提供参考和方向。
1 视频监控下的心理防范区域研究
1.1 视频监控有效覆盖区域
视频监控摄像机的理论视域范围由摄像机内部光学元件的参数决定,摄像机光学系统获取图像的过程可以简化为凸透镜成像,视域范围受镜头焦距和图像传感器靶面尺寸的影响。摄像机成像原理和摄像机理论视域模型如图1、图2所示。
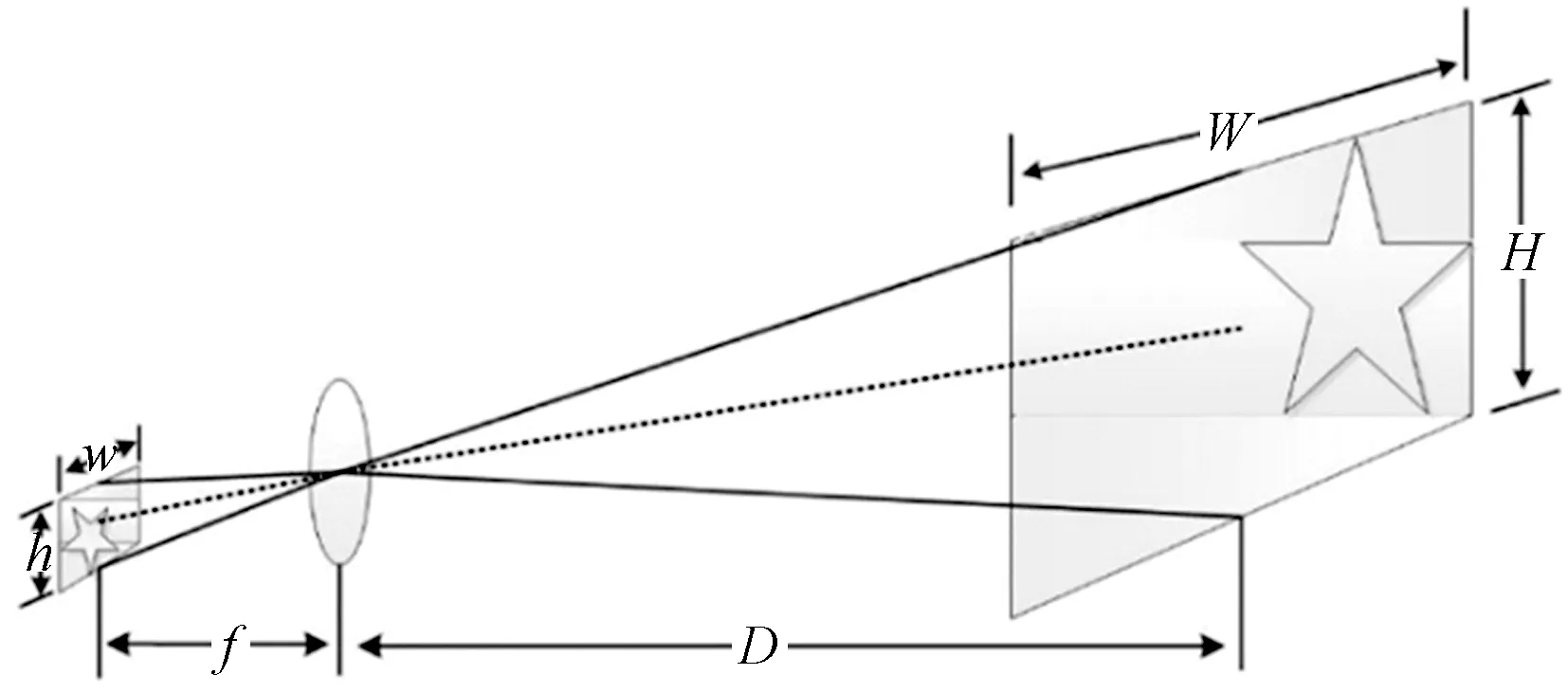
f为镜头焦距,w和h分别为相机图像传感器靶面尺寸,D为成像物距,W和H分别为成像画面里实际物体的尺寸图1 凸透镜成像原理Fig.1 Theory of convex imaging
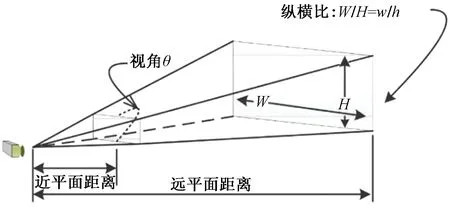
θ为镜头纵向视角的角度图2 摄像机理论视域Fig.2 Theoretical FoV of camera
在不考虑摄像机俯仰角对成像影响时,焦距f、目标高度h、成像距离D、目标在成像器件上的像高H之间的关系为
f=hD/H
(1)
当监控摄像机安装在固定点位后,受安装角度和高度及监控环境的影响,其实际视域范围将发生变化。图3所示为摄像机实际视域模型[6],可见,摄像机实际视域受地面、建筑及其他物体的影响,会出现遮挡理论视域的情况。
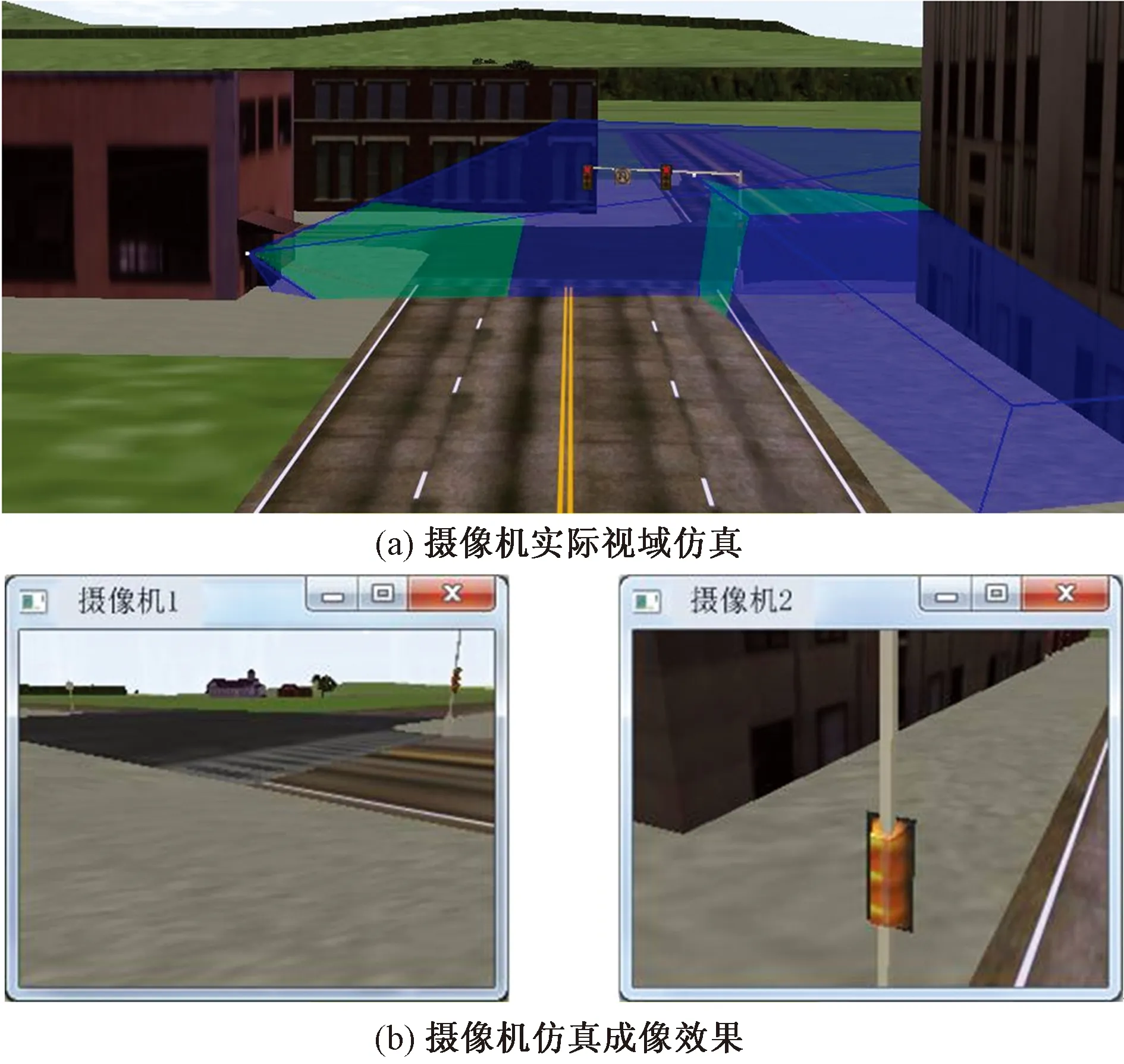
图3 摄像机实际视域模型Fig3 Simulation models of cameras’ real-FoV
图4展示了摄像机安装参数与视域地面投影关系。在考虑摄像机俯仰角对成像的影响后,上述目标高度应当乘以俯仰角φ的余弦。参考坐标原点为摄像机安装位置在地面的投影位置,D为成像物距,D1、D0、D2分别是摄像机视角在地面投影的近端、中心位置(光轴与地面交点)和远端距离参考坐标原点位置,在画面中分别对应画面底端、画面中心水平位置、画面顶端像素。W1、W0分别是画面底端和中心水平位置在地面对应位置的宽度。画面中目标清晰度符合特定要求的水平位置对应于地面最远处的距离为Ds,对应的地面位置宽度为Ws。

图4 摄像机安装参数与视域地面投影关系示意Fig.4 Correspondence between installation attribution of camera and ground projection of FoV
视频监控系统的监控级别一般分为:监视与控制、探测、观察、辨认和识别五个级别。视频监控级别如图5所示。其中监视与控制级别一般适用于大场景宏观监测。对当前广泛使用的数字摄像机而言,根据《公共安全视频监控系统部署导则》(IEC62676-4)的界定,视频图像画面中关键目标的清晰度可参照以下推荐值[7]:

图5 视频监控级别示意Fig.5 Classification of camera surveillance
(1)对于探测级别,视频目标清晰度的要求是:能够依据画面看到目标群体,监控画面中的目标高度不能低于画面高度的10%。
(2)对于观察级别,视频目标清晰度的要求是:能够依据画面区别不同类型的目标,监控画面中的目标高度不能低于画面高度的25%。
(3)对于辨认级别,视频目标清晰度的要求是:能够依据画面判定人、车物的主要外貌(外观)特征, 监控画面中的目标高度不能低于画面高度的50%。
(4)对于识别级别,视频目标清晰度的要求是:能够依据画面识别不同的目标,监控画面中的目标高度不能低于画面高度的100%。
暂不考虑监控画面中目标尺寸过大而无法辨认或识别的情形,即只考虑目标距摄像机越近,监控获取的图像越可靠的情形,可将上述摄像机覆盖区域投影到地面形成二维地面上的摄像机有效覆盖区域模型,其对应关系如图6所示。
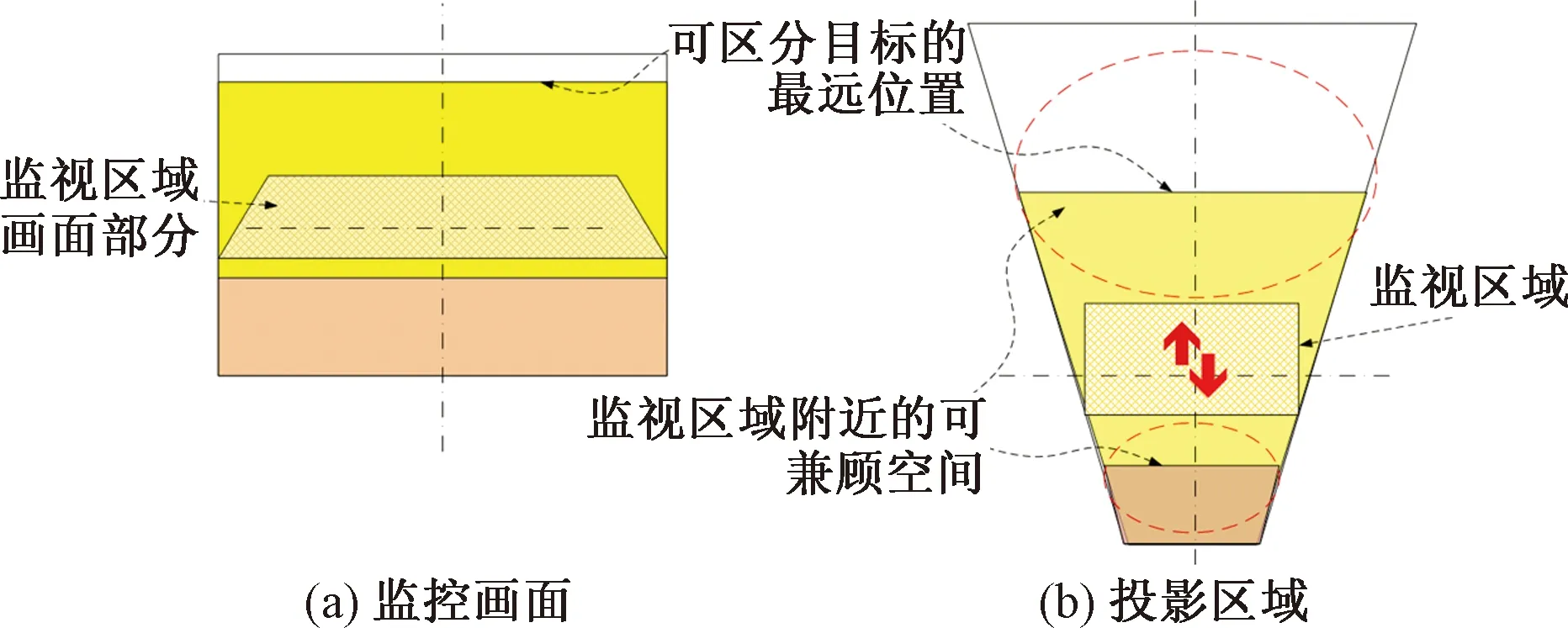
图6 摄像机视场角在地面的投影区域与监控画面之间的对应关系示意图Fig.6 Correspondence between the projection area of the camera’s FoV on the ground and the monitor screen
摄像机视场角在地面的投影大多数情况下为如图6所示意的梯形,其中两个平行边中较短边靠近摄像机安装位。当俯仰角很小时,视场角的远端不能与水平地面相交,可以认为覆盖到无限远,但有效视域范围(即图6中监视区域)还是有限的。
1.2 视频监控心理防范覆盖区域模型
认为在有入侵行为发生时,入侵者会试图规避视频监控摄像机的监控。由于入侵者无法得知正在运行的监控探头的设备参数和安装参数,亦无法准确得知其自身是否在监控探头的有效监控视域内,因此入侵者只能根据已有知识储备和入侵经验尽可能地躲开监控探头的有效监控视域。视频监控的心理防范区域定义为由于监控摄像机的显性存在,入侵者认为摄像机可监控到的路面覆盖范围。入侵者通过观察摄像机安装的外部环境,在其心理形成监控摄像机的防范区域。
在此对心理防范区域在地面上的二维投影进行研究。由于行为人在运动时,对距离的感受最为直接,因此将视频监控心理防范区域模拟为圆形,其圆心区域为入侵者最需要规避的区域。将视频监控心理防范区域模型近似为以摄像机监控覆盖的路面中心位置(光轴与地面交点)为圆心,半径与摄像机安装高度正相关的圆形。视频监控心理防范区域强度定义为由入侵者的认知程度不同,入侵者认为的监控覆盖区域内摄像机获取图像的清晰程度。心理防范区域强度模型以摄像机监控覆盖的路面中心位置为极值呈负对数型衰减。图7展示了视频监控心理防范区域模型。
图7 视频监控心理防范区域模型Fig.7 Model of psychological prevention area of video surveillance
Cp=Rs(h)e-f(d),f(d)⊂[0,+∞),
s(h)⊂[0,1],R⊂[0,1]
(2)
式(2)中,Cp表示为入侵者对摄像机监控覆盖范围的心理防范区域强度;R为入侵者对视频监控防范能力的认知系数;h为摄像机的安装高度;d为路面位置点与摄像机监控覆盖的路面中心的距离。
s(h)=e-αh
(3)
f(d)=βd
(4)
式中,α和β为心理防范区域强度系数,α和β取值越小,表示心理防范强度越大。通过强度系数的控制,当d⊂[0,h]时,Cp(d)⊂[0,Cend]。
根据心理防范区域定义,入侵者无法准确得知监控实际覆盖范围的界限,为便于分析,认为当d等于摄像机安装高度时为心理防范区域强度衰减截止点,此时Cp=Cend。
以摄像机在地面投影为原点,摄像机朝向在地面投影为X轴,在地面建立笛卡尔直角坐标系。对该摄像机而言,入侵者的心理防范区域模型可以表示为

(5)
式(5)中,x和y为在上述坐标系中的路面位置。图8展示了监控相机的心理防范区域与摄像机覆盖模型的对应关系。
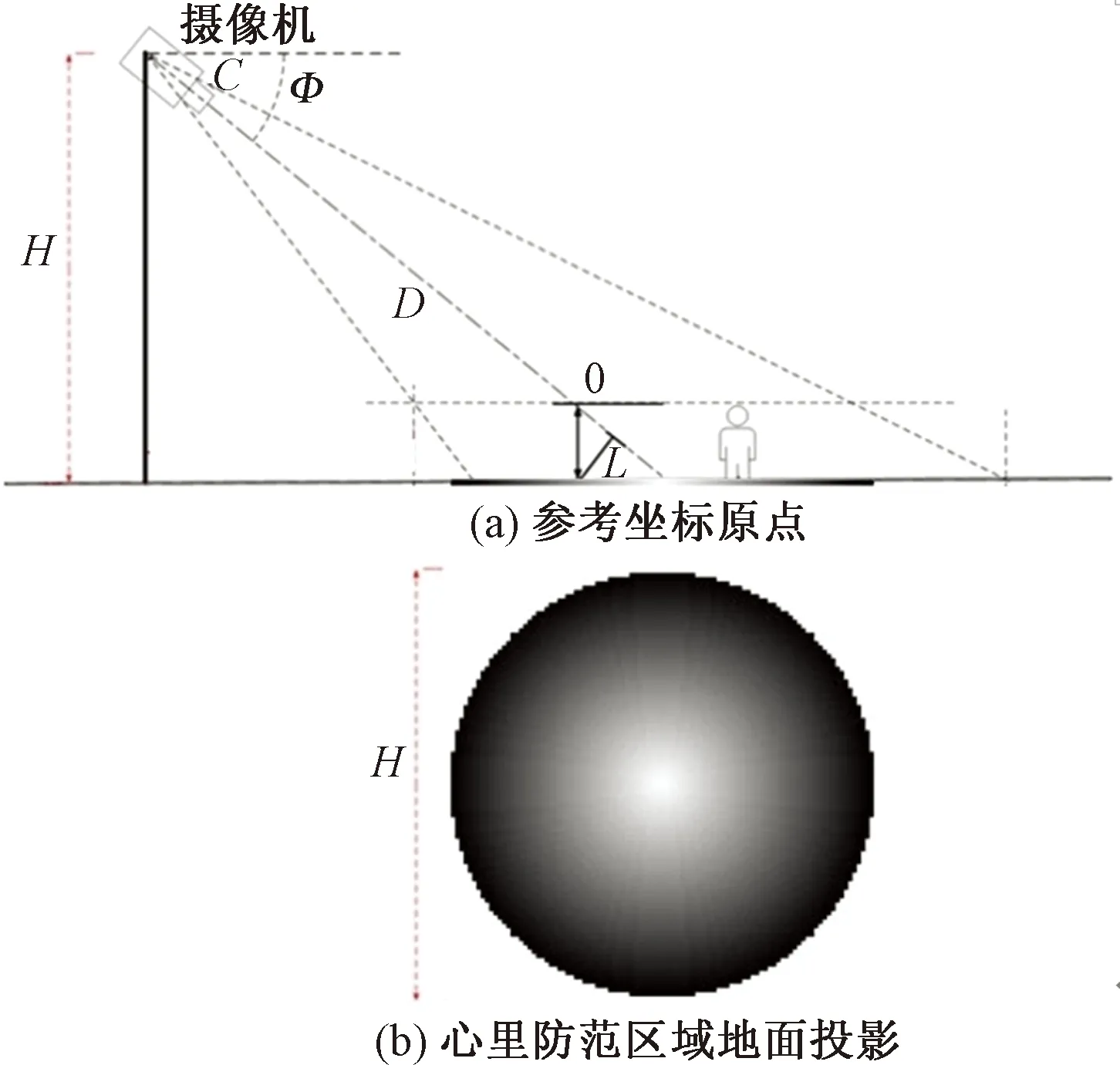
图8 监控相机的心理防范区域示意图Fig.8 The psychological prevention area of camera
2 基于规避心理防范区域的最优入侵路径算法研究
视频监控防范下的最优入侵路径定义为,为实施入侵行为,在视频监控环境下,入侵者为尽可能规避视频监控防范而选择的入侵路径。
在有视频监控系统存在的情况下,入侵行为人会尽量避免监控探头出现在其入侵路径上,或者入侵行为人在监控画面上以尽可能小的目标、不清晰的目标或无法辨别/识别的目标形式出现。因此,入侵行为人往往会选择远离监控探头或其认为是监控盲区的入侵路径。对视频监控系统进行有效设计,尽可能使监控探头覆盖监控区域的监控目标在辨别/识别的监控级别上,可有效增加入侵行为人的暴露成本;加之物防和人防的合理布控,可更加有效的预防和打击违法犯罪行为。
在优化理论的研究实践中,路径搜索已经得到了较为深入的研究[8]。目前路径搜索算法在航路规划、车辆道路规划等众多领域有广泛的应用。启发式算法是指在可接受的计算时间、占用空间等开销的前提下,给出待解决的组合优化问题的一个可行解,这种方法虽然不能保证所得解的最优性,但在满足一定条件的基础上,启发式算法可到较为理想的优化解。A*算法是一种确定性的启发式搜索算法,A*算法有一套实用的地图分割方式,并且该算法的启发函数可以帮助更快地找到一条通向目标点的路径,在搜索速度上远胜于传统的深度优化搜索和广度优化搜索算法,因此A*算法在工程上得到了广泛应用。以下研究以A*算法为基础,计算视频监控防范下的最优入侵路径.
2.1 传统A*算法的基本原理
A*算法将地图进行栅格化处理,使用正方形作为栅格化地图的基本元素,每个栅格用1或0进行标记。图9为0/1栅格化地图示意图,标记为1的栅格表示该栅格禁止穿行,标记为0的栅格表示可以正常通过。
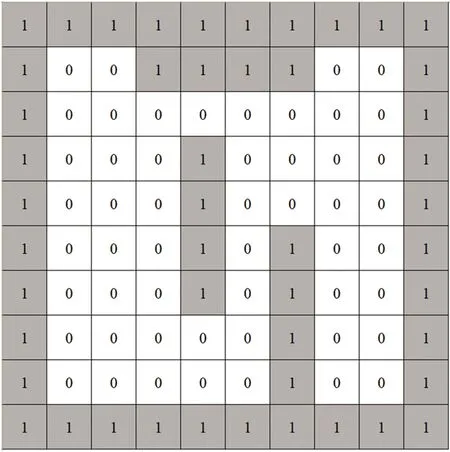
图9 0/1栅格化地图Fig.9 0/1 rasterized map
算法维护open和close两个列表,采用8邻域节点扩展方法,把待扩展的节点放入open表中,把已经扩展完的节点放入close表中。
图10中,中心点表示起点,在节点扩展过程中,先将其设为父节点,并将其放入close表中;有箭头指向的为与起点相邻的8个节点,箭头指向为这些节点的父节点,它们都是为带扩展节点,将其放入open列表中。节点的扩展过程就是从open表中每次取出一个最好的节点放入close表中,并以此节点作为当前节点,进而扩展新节点。在寻址过程中,两个表一直处于动态变化过程中。

图10 节点扩展示意图Fig.10 Diagram of node expansion
A*算法使用一种启发式的评价函数进行节点的扩展,对每一个节点使用评价函数计算该节点的优劣,每一次扩展当前评价最优的节点。A*算法的评价函数一般表示为
f(n)=g(n)+h(n)
(6)
式(6)中,g(n)为代价函数,表示从起始点到当前节点花费的代价,表示为

(7)
式(7)中,Css和Cdd为相邻节点间的距离常数,一般Css=10,Cdd=14。
h(n)为启发函数,表示当前节点到目标节点可能消耗的代价值,即体现代价函数的启发信息。h(n)通常用当前节点与目标节点之间的曼哈顿距离表示:
h(n)=(|xn-xend|+|yn-yend|)Css
(8)
式(8)中,(xn,yn)表示当前节点,(xend,yend)表示目标节点。
根据代价函数和启发函数的定义可知,f(n)表示从起始节点开始,经过节点n到达目标节点所消耗的代价值。
图11中小栅格左下角数字表示为g(n)的值,小栅格右下角数字表示为h(n)的值,小栅格右上角数字表示为f(n)的值,小栅格中间的箭头指向当前节点的父节点,白色圆圈所在的小栅格为起始位置,黑色圆圈所在的小栅格为终止位置,绿色栅格为搜索得到的路径。
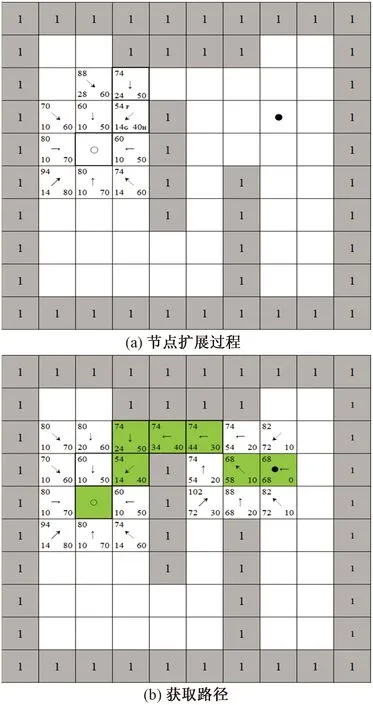
图11 传统A*算法路径搜索示意图Fig.11 Diagram of path searching uing traditional A* algorithm
2.2 基于规避心理防范区域的A*算法改进
根据心理防范强度的定义,心理防范强度的取值在区间[0,1]中,因此,传统A*算法在地图栅格化过程中使用的0/1栅格划分法并不能满足规避心理防范区域的寻找需求。在改进的A*算法中[9],采用0~1栅格化分法[10],图12为0~1栅格化地图

图12 0~1栅格化地图Fig.12 0~1 rasterized map
示意图。标记为1的栅格仍表示为该栅格不可穿行;标记为0的栅格表示该栅格可穿行且不再防范区域内;标记为其他值的栅格表示该栅格在防范区域内,标记值表示心理防范强度,值越大表示入侵路径经过该栅格时受到的威胁越大,即越容易别发现。
传统A*算法的评价函数只考虑距离因素,节点扩展过程中只会扩展到标记为0的栅格。为适应规避心理防范区域的A*算法,对评价函数做出以下改进:
f(n)=g(n)+h(n)
(9)
(10)
h(n)=(|xn-xend|+|yn-yend|)Css+
Ri(Cp)
(11)
改进算法的f(n)和g(n)函数引入风险规避函数Ri(Cp),Ri(Cp)表示心理防范区域对路径评价函数的影响。风险规避函数与心理防范强度呈正相关,与当前节点到目标节点的距离呈负相关。即表现为栅格所在位置的心理防范强度越大,入侵路径经过该栅格时风险越高;栅格所在位置与目标距离越近,入侵路径经过该栅格时风险越高。将风险规避函数定义为
Ri(Cp)=eCpCD-weightMn(dend)-1
(12)
Mn(dend)=λdend
(13)
式中,Cp为心理防范强度,CD-weight为距离权重常数(与Css和Cdd相关),Mn(dend)表示当前节点到目标节点的曼哈顿距离,λ为距离系数。
图13与图11表示方法一样,选取CD-weight=12,取λ=1。从图13可以看出,在使用改进A*算法搜索得到的路径上包含视频监控心理防范区域较弱的部分。

图13 改进A*算法路径搜索示意图Fig.13 Diagram of path searching uing improved A* algorithm
3 视频监控下的最优入侵路径示例
基于以上理论研究,使用基于规避心理防范区域的A*算法,使用QT框架,开发了视频监控下模拟入侵软件平台,在此基础上对视频监控下的最优入侵路径进行了实验研究。
对实验所在街道的监控部署方案进行实地调研后,在软件平台上进行了摄像机部署,结合前文视频监控心理防范覆盖区域模型的研究,视频监控环境下的行为人心理防范区域如图14所示。

图14 视频监控下心理防范区域示意图Fig.14 Psychological prevention areas of video surveillance
图14所示的心理防范区域为入侵者对视频监控防范能力的认知系数R=1,心理防范系数α=0.001,心理防范系数β=0.000 1。
根据前文所述的基于规避心理防范区域的最优入侵路径算法研究,在监控方案部署环境中,将建筑位置设置为不可到达区域后,进行入侵模拟,得到最优入侵路径如图15所示。

图15 视频监控环境下最优入侵路径Fig.15 Optimal intrusion path under video surveillance
在计算最优入侵路径时,取距离权重常数CD-weight=16,距离系数λ=19。可以看出,在当前选取的心理防范区域和最优路径的参数条件下,入侵者有一定的视频监控常识,或者说入侵者可以在规避监控相机的情况下选取较为便捷的入侵路径。虽然入侵路线也经过了几个监控相机对应的入侵者的心理防范区域,但可以看到入侵路径只是从这些心理防范区域的边缘经过,即入侵者认为此时其监控图像上表现出的目标足够小,对其完成入侵行为的影响不至于增加过多的风险,这与上文的讨论情况一致。
对于心理防范强度较小的入侵者,将入侵者对视频监控防范能力的认知系数R=0.8,心理防范系数α=0.005,心理防范系数β=0.03。最优入侵路径的计算系数保持不变,此时最优入侵路径计算结果如图16所示。

图16 对视频监控心理防范认知较低情况下的最优入侵路径Fig.16 Optimal intrusion path for low cognition of psychological prevention under video surveillance
从图16中可以看到,入侵路径几乎忽视视频监控系统的存在,或者说入侵者不认为监控相机对其入侵行为能操成影响,其所得结果也与上文的讨论情况一致。
4 结论
本文对违法犯罪行为人对视频监控防范认知情况进行了概要分析,提出了视频监控的心理防范区域模型,并进行了基于规避心理的最优入侵路径研究。通过研究得到以下结论。
(1)视频监控系统是安全防范系统的重要组成部分,与其他传感器网络一样,对视频监控系统的部署和应用的研究应将其防范能力的研究放在重要位置,不宜将全部重心倾向于是否能看清或者如何指导侦破案件。
(2)在突出监控摄像机的威慑作用时,违法犯罪行为人对摄像机的心理防范程度对其实施入侵行为的路径是有较大影响的。
(3)通过基于规避心理防范区域的入侵路径研究,可以评估视频监控系统的路径防范能力,从而指导前端摄像机的合理部署。
下一步仍需对进一步深入分析违法犯罪行为人对视频监控防范的认知程度对其实施违法犯罪行为的影响,进一步优化心理防范区域模型,提出科学的参数配置等级。对于最优入侵路径的研究还需配合视频监控的实际防范区域的进行进一步验证。
