基于三维激光扫描技术的高边坡变形监测分析
2020-08-03司梦元郭杰明袁亚通白祖应王义成应春莉韩达光
司梦元, 周 银, 郭杰明, 袁亚通, 白祖应, 王义成, 应春莉, 韩达光
(1.重庆交通大学土木工程学院,重庆 400074;2.云南交投普澜高速公路有限公司,普洱 665000; 3.重庆鲁汶智慧城市与可持续发展研究院,重庆 401147;4.奥斯陆城市大学技术&艺术与设计学院,奥斯陆 0130)
随着中国的高速公路、铁路等交通基础设施的日益发展,尤其是在中国山区交通基础设施的建设过程中,由于山区地质条件的复杂性,在建设高速公路中不可避免地要对沿线地理环境产生不同程度的破坏,各地区形成大量的边坡。其中,高边坡的变形失稳与破坏将直接影响公路交通运输以及人身安全[1]。为此,在高速公路的施工阶段及运营管养阶段,为确保高速公路运营期的安全性,对公路沿线边坡进行变形监测显得尤为重要[2]。随着新型监测技术的不断更新发展,如遥感技术、摄影测量技术及三维激光扫描技术将不断弥补传统测量技术的不足[3-6]。其中,三维激光扫描技术由于其能够快速高效地获取扫描对象的高精度原始点云数据,被广泛应用于工程建设及众多变形监测领域[7-10]。徐进军等[11]将三维激光扫描技术引入到滑坡变形监测于分析领域,并充分利用滑坡体上自然物的大量点云作为监测点来完整和分析其变形。吴侃等[12]采用地面三维激光扫描技术,研究了三维激光扫描的单点精度、数据采集方法及数据处理方法,并提出了利用建筑物特征线是否变形来判定建筑物变形的思路,表明三维激光扫描能够满足精度要求。李强等[13]以某采煤沉陷区内地表形明显、沉陷趋势显著的地表为研究对象,采用三维激光扫描技术对其进行地表沉降变形监测研究,监测区整体变形趋势。
三维激光扫描技术在不同工程领域变形监测的应用表明,将其用于变形监测领域具有显著的可行性且突破了传统变形监测的局限性。基于此,本文拟采用三维激光扫描技术对高速公路的高边坡进行变形监测,利用三维激光扫描仪在不同时期对边坡进行数据采集,以永久性三棱锥作为标定物,利用其点云特征提取控制点将两期点云数据配准分析边坡位移变形。根据边坡特征基于点云数据提取边坡的特征点、特征线对边坡的整体变形、竖向位移沉降变形及边坡的水平位移变形进行监测分析。
1 研究内容
1.1 研究介绍
采用三维激光扫描技术结合点云算法程序对高速公路高边坡进行变形监测分析研究。研究项目依托于某高速公路养护工程,课题组选取高速公路实验段内主路与匝道交汇处的路堑高边坡为对象进行数据采集与研究工作(图1)。该边坡开挖长度170 m,坡顶最大高度35 m。分四级开挖,坡度在20°~30°,开挖区地势复杂、山体陡峭。采用三维激光扫描技术对高边坡进行完整的三维点云数据采集,快速、高效的建立三维点云数据模型,通过对边坡的多期点云数据对比,得到边坡的整体变形状况,同时依据三维扫描边坡点云数据,编制相应算法提取边坡混凝土格构梁特征点、特征线,提取边坡位移变形数据,保证数据的真实客观,很大程度上提高边坡的监测效率。

图1 边坡整体照片Fig.1 The overall picture of the slope
1.2 边坡监测方案布置
由于边坡变形是长期而又缓慢的变形过程,这就需要不同时间节点对边坡进行多期数据采集。为准确、高效地获取边坡对象三维监测数据,在第一次数据采集前期需要对边坡进行实地考察,并确定数据采集监测点以及永久性边坡控制点。在扫描前期,对确定的控制点进行永久性浇筑并在其附近做标志物,待浇筑控制点稳定后进行三维激光扫描数据采集工作。以首次扫描数据为基准数据后期扫描数据为对象进行边坡变形的内业数据处理。具体监测方案如图2所示。
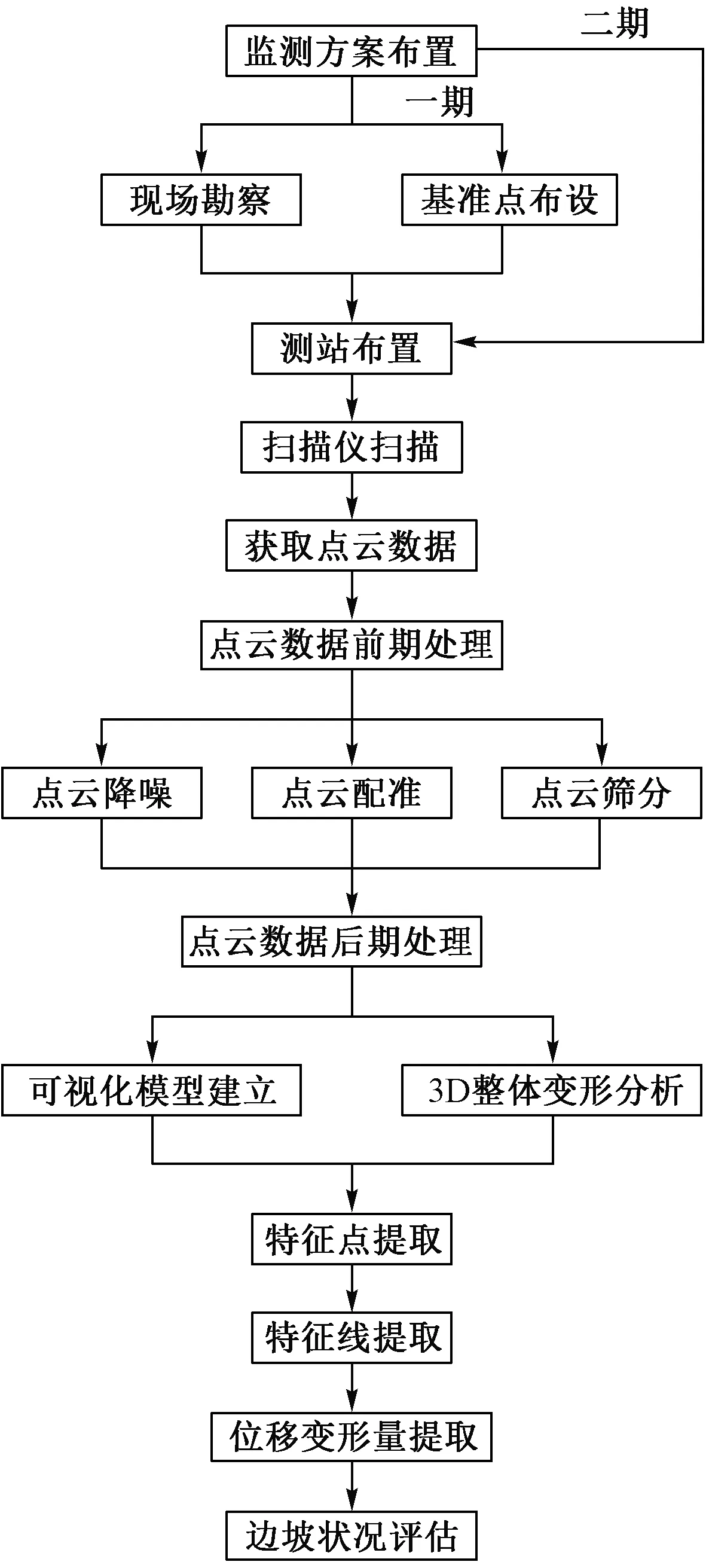
图2 边坡变形监测流程Fig.2 Flow chart of slope deformation monitoring
2 边坡监测数据采集
2.1 测站及控制点布置
测站布置即扫描整个边坡对象所需要设置的监测站数量及扫描仪器架设位置,以及根据监测站位置确定扫描仪参数信息。针对扫描对象的大小、形状、范围及地理环境,结合周边环境确定测站位置和设站数量,为保证后期数据的完整性及减少拼接误差,应在保证数据的精度和完整性的前提下,尽量减少设站数量。
控制点作为多期点云数据配准的控制点,布置时必须严格要求,控制点的可靠度将直接影响检测结果的精度及准确性。控制点布置位置应为地基稳固的无变形区域,不易受环境因素影响。控制点的数量应在三个以上,以防止其中一个控制点由于不可抗力因素发生破坏,且任意三个控制点一组都要满足其能构成空间三角形。控制点的周围应设置明显标志,一是防止无关人员对其进行破坏,二是方便后期数据采集容易识别。
2.2 边坡点云数据采集
针对高速公路边坡所处地理状况,采用FARO-X330三维激光扫描仪对边坡对象进行全覆盖扫描。为得到完整清晰的边坡破面点云数据,研究组选取边坡另一侧的山坡坡顶作为监测点。由于监测点位置视野开阔,扫描仪仅需一站扫描就能够获取边坡的完整点云,因此不需要多站扫描,很大程度上减少了数据误差。此外,为使扫描仪能够准确、完整地捕获控制点,需要在扫描前期对控制点附近存在的植被、杂物及其他障碍进行清除。为了排除由于不可抗力因素导致某个控制点位置发生改变,每次扫描需要捕获三个以上控制点以保证点云拼接配准精度。最后,为保证采集的数据能够满足研究组的需要,在不改变监测点位置的情况下调整仪器参数进行多次扫描,边坡点云数据如图3所示。研究组在第一期扫描6月后对边坡进行二期三维激光扫描工作。

图3 边坡点云数据Fig.3 Point cloud data of the slope
3 边坡点云数据处理
3.1 点云数据的预处理
由于三维激光扫描仪所采集的数据为其扫描范围内所有对象的点云数据,包括植被、车辆等与边坡变形监测无关的点云信息。为此,在点云后期处理前期应对点云数据进行降噪处理,删除无关点数据[14]。本次边坡数据采集中扫描仪测站位置开阔,仅需一站扫描就能获取完整边坡点云数据,因此,不存在点云数据的多站拼接问题。
3.2 两期边坡点云数据配准
三维激光扫描仪扫描数据是以各自扫描站点为原点的局部坐标系下的点云数据。对边坡进行变形分析前需要将多期点云数据统一到同一坐标系下。目前解决此类问题的主要方法多为标定物拼接和迭代最近点法(ICP算法)等。利用标定物拼接的方法较为快捷、简便,但由于扫描各站的视觉问题很难保证标定物的点云完全相同,根据标定物外形来计算的几何中心也就很难保证其完全一致,此方法误差源较多[15-16]。ICP算法[17-18]精度较高,但是其需要大量的运算迭代过程,相当耗时,若其初值选择不合适将导致收敛速度将非常慢,甚至出现发散现象。基于此,研究组结合标定物拼接方法的特点,在扫描前期,在边坡底脚处浇筑永久性三棱锥作为标定物,利用其点云特征提取控制点。
如图4所示,图4(a)为浇筑在边坡底脚的三棱锥标定物,图4(b)为扫描仪捕获的三棱锥点云数据。依据三棱锥点云数据特征,利用三个非平行平面相交于一点以及三棱锥的三个面容易被扫描仪同时捕获的原理提取相应控制点。特别地,在制作三棱锥标定物时需要严格要求其模板的制作以保证三棱锥的三个面绝对光滑,且三棱锥应通过浇筑稳固在边坡坡脚混凝土框架上,待三棱锥稳定后再进行扫描工作,且在每次扫描后对现场浇筑得永久性三棱锥标定物做好保护措施以免其受到破坏。
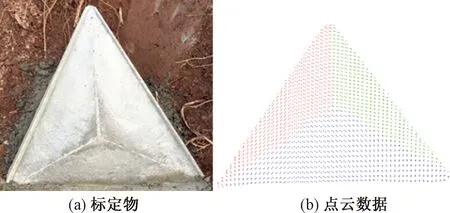
图4 三棱锥标定物及点云数据Fig.4 The image of the calibration and its point cloud data
对标定物控制点提取原理如图5(b)所示,取两期点云数据中控制点确定各期数据的局部坐标系,并通过平移旋转将多期数据换算到同一坐标系下。由于扫描仪工作平面为大地水准面,故其平移变量包含三个变量(X、Y、Z)和一个旋转变量Z。实验组通过平移旋转矩阵算法确定四个未知变量将两期点云配准在同一坐标系下,配准后的两期点云如图5(a)所示,为检查配准效果,取扫描区内相对稳定的拱桥点云数据观察,如图5(a)所示蓝色点云为一期扫描基准数据,黄色点云为二期监测数据。两期点云的配准精度决定后期数据分析的可靠性,为此,提取拼接后的两期点云数据控制点计算配准误差,如表1所示,可以发现配准后控制点的方向误差最大为0.000 58 m,误差相对较小,一般坐标系配准精度要求0~0.004 m,很大程度上满足配准精度要求。

图5 边坡点云配准效果Fig.5 The point cloud registration effect of the slope

表1 控制点配准结果
3.3 边坡点云数据过滤
三维激光扫描仪能够获取扫描对象的大量点云数据,根据测站的不同获取不同对象的点云数据。由于扫描现场环境复杂,捕获的点云中包括树木、建筑物、植被等众多对象,而由于边坡坡面植被的季节性生长,若用边坡坡面对边坡进行变形分析必然会导致数据的失真。考虑到边坡上存在植被,而植被的生长使得两期边坡坡面点云数据产生一定程度的变化,且用于边坡支护的混凝土格构梁与边坡连为整体又不受植被等影响,以混凝土格构梁的位移变形来反映边坡状况。边坡局部点云如图6所示,为分析钢筋混凝土格构梁的状况,需要在捕获的点云数据中提取锚碇端及钢筋混凝土格构梁的点云数据。

图6 边坡局部点云数据Fig.6 Local point cloud data of slope
扫描仪获得的点云数据信息中包括空间三维坐标(X,Y,Z)、激光反射强度及颜色信息(RGB)等属性,而颜色信息(RGB)作为能够有效地鉴别钢筋混凝土格构梁与其他对象的点云属性。依据混凝土格构梁的点云颜色属性特点编制相应的算法程序来过滤混凝土格构梁外其他对象点云数据,经过算法程序滤除后仍然会存在个别非格构梁对象点云数据(颜色属性相似),可通过人工删除即可。点云过滤处理后局部点云数据如图7所示。
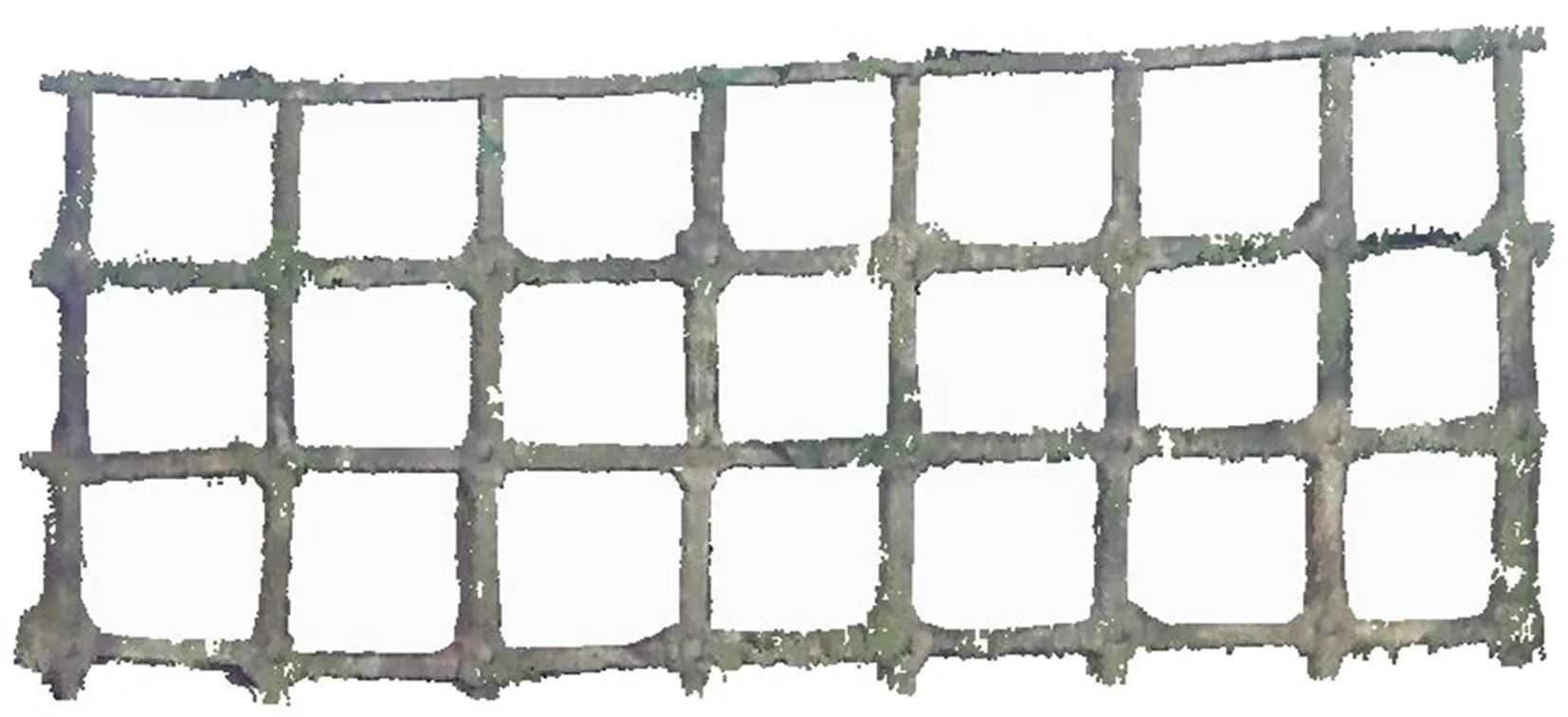
图7 过滤后边坡局部点云Fig.7 Local point cloud of the slope after filtration
4 边坡变形分析及变形量提取
4.1 边坡整体变形分析
边坡的失稳破坏是以渐变积累到突变失稳的破坏过程,且在其发生失稳破坏前期将会表现出各种破坏征兆,如变形位移超出控制指标、坡体产生裂缝、变形速率加快,这些破坏征兆均发生在边坡的局部。采用监测点监测、人工巡检等无法详细描述边坡局部发生破坏的空间特征。三维激光扫描技术的优势在于其能够获取监测对象的整体点云数据,能够实现对边坡的三维重建和空间分析。为了能够获取边坡的变形的空间特征及发展趋势,采用算法程序提取混凝土格构梁的特征点、特征线以及建立边坡支护混凝土格构梁的整体变形模型对边坡进行整体变形分析。
本研究对多期点云数据进行精确配准、过滤等处理后得到边坡混凝土格构梁支护结构点云数据。以第一期边坡数据为参考基准分析二期边坡点云数据,形成一幅基于两期边坡模型相同部位点云距离差值的整体位移变形,边坡整体位移变形如图8所示,其中红色部位处边坡发生位移变形,该3D比较位移变形图能够发现边坡发生多处局部不均匀变形。

图8 边坡整体变形图Fig.8 The overall deformation image of the slope
4.2 边坡位移变形量提取
边坡混凝土格构梁为矩形横截面,扫描仪能够获取其外侧面点云数据,研究中采用算法程序充分利用混凝土格构梁的正面与下侧面的空间平面交线为特征线,将格构梁分割为N小段,每段特征线的中点为特征点。特征点的提取应遵循以下原则:对于被树木、植被等遮挡的位置应避免使用该处点云数据,利用两侧未被遮挡对象特征点进行数学逻辑插值;保证两期数据特征点在边坡的相对位置相同。选取混凝格构横梁的正面与下侧面的交点作为特征点,以0.2 m步距提取特征点。利用两期边坡相对位置特征点的位移差值来反映边坡位移变形量,取各级边坡的坡顶和中部横梁共八条代表性的横梁分析获得二期边坡的三维变形结果如图9所示。

图9 边坡三维变形图Fig.9 The 3D displacement of the slope
通过对提取的边坡特征点三维数据对比分析能够看出,在整个边坡中各级边坡坡顶、坡体均存在较多不同程度的位移变形,且边坡的位移变形主要体现在水平位移Y及竖向位移Z方向。为分析边坡的变形状况对其进行评估,提取边坡的八条代表性的横梁特征点对边坡水平位移Y和竖向位移Z进行计算分析。单一的特征点仅能反映边坡特征点处的离散变形特征,而不能展现出边坡的连续变形特征,为此,通过将提取边坡的连续特征点连接为特征线直观地反映边坡对象的连续线性变形特征。水平位移变形结果如图10(a)所示,竖向位移变形如图10(b)所示,能够反映出边坡的坡面位移的大小、方向和发展趋势。分析得到:在整个边坡中各级边坡的坡顶变形最为显著,最大水平位移Y达0.063 56 m,最大竖向位移Z达0.102 73 m;边坡局部变形为不均匀变形,局部水平位移在0~0.07 m范围内,竖向位移在0~0.11 m范围;研究区边坡整体变形较为平缓,最大沉降位移为0.102 73 cm,发生位移变形多数是由梅雨季节雨水冲刷和浸泡导致,且位移变形较小,边坡状态比较稳定。

图10 边坡位移变形Fig.10 The vertical displacement of the slope
5 结论
利用三维激光扫描技术对边坡进行非接触测量,能够高效地获取边坡高密度点云数据,快速构建边坡工程的三维数字化信息模型。以多期边坡点云数据为对象对边坡的变形进行分析,结果表明:应用三维激光扫描技术对高速公路高边坡进行非接触变形监测,能够对边坡任意位置变形分析,所得到的边坡变形信息更为丰富且真实;突破了传统的单点测量方式,实现了传统技术难以达到的从点到面的整体变形分析,所获得的监测结果在很大程度上满足边坡监测的精度要求。可见,将三维激光扫描技术应用于边坡监测领域,不仅使得边坡变形监测更加精细化、智能化,而且很大程度上提高了边坡监测效率,具有一定可行性和实际应用价值。
