MR引导下乳腺穿刺活检机器人研究进展
2020-07-31李茂林连婧阁李康安
李茂林,连婧阁,李康安
(1.上海交通大学医学院研究生院,上海 200025;2.上海市第一人民医院医学影像科,上海 201600)
乳腺癌是女性最常见的恶性肿瘤之一,发病率逐年增加[1],严重危害女性健康[2]。早发现、早治疗对乳腺癌患者具有重要意义。目前我国上海地区TNM Ⅰ期乳腺癌患者治疗后5年生存率可达95%以上,而Ⅲ~Ⅴ期患者5年生存率为70%以下[3]。
影像学引导下微创穿刺活检是实现早发现、早治疗乳腺癌的重要途径之一。乳腺癌的影像学检查方法主要包括乳腺X线、B超及MRI等。MRI具有极高的软组织分辨率,且可通过不同扫描序列和增强扫描等方式提供更多信息,显示肿块内血管及灌注等情况,是目前最为有效的乳腺影像学检查手段[4-6]。尽管MR引导下乳腺穿刺活检的特异性、准确率和成功率均较高[7-9],但受患者呼吸运动、体位变化及穿刺引起的组织变形等因素的影响,难以保证穿刺的精度;且自定位扫描到进针穿刺所用时间较长,也导致其准确率降低。利用手术机器人装置进行操作是提高穿刺效率和精度的理想途径。相比人工操作,利用手术机器人进行操作具有多方面优势,其灵活性好、精度高,工作稳定,且可以根据实际情况设计并调整其结构,使之更加适应手术操作空间。目前已有大量机器人系统广泛用于外科手术、康复治疗及穿刺活检等领域,并取得显著进展。MR工作环境特殊,对MR引导下乳腺穿刺活检机器人的设计要求更为严苛。本文针对MR引导下乳腺穿刺活检机器人研发及应用进展进行综述。
1 MR环境特点及限制
MR引导穿刺活检机器人虽具有较高准确率,但受工作环境制约严重。一方面,MR检查环境常较狭窄,临床使用多数MR扫描设备为封闭式,宽度多为1~2 m,空间狭小,难以安装和运行普通穿刺活检设备;另一方面,MR环境中存在大多为1.5~3.0T范围内的强磁场,部分金属材料会受其影响,强大磁场可致其温度升高和位移,对机器人的运动性能产生严重干扰;且金属材料也会在MRI中产生明显伪影而导致图像失真。上述各点对MR引导穿刺活检机器人的本体、驱动设备及控制设备的结构设计和材料选取等均构成了严苛限制。
2 国内外研究现状
针对上述问题,研究者们采取各种途径来减少MR环境对穿刺活检机器人的影响。KAISER等[10]开发了名为“ROBITOM”的MR兼容乳腺穿刺活检手术机器人系统(图1),穿刺过程中患者俯卧于检查床上,机器人通过一条向前探出的机械臂对肿瘤部位进行穿刺活检操作,体外测试结果显示其准确率较高。PFLEIDERER等[11]将该系统用于临床,7例乳腺癌中,5例穿刺活检结果与手术病理诊断结果完全一致,误诊1例侵袭性肿瘤,漏诊1例导管癌。
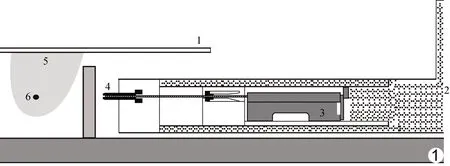
图1 KAISER等[10]设计的MR引导下乳腺穿刺活检机器人示意图 1.患者支撑板; 2.可向前伸出的机械臂; 3.活检枪; 4.穿刺针; 5.乳腺; 6.病灶(靶点)
LARSON等[12]设计了一款具有5个自由度的MR兼容乳腺介入机器人(图2),该装置由超声波电机提供动力,将其整体置于患者胸部下方。该系统设计用途为检测单侧乳腺,占用空间相对较小,操作者可以之从不同方向、不同角度对乳腺进行穿刺;如欲检测双侧乳腺,则待完成一侧穿刺后重新固定,再行穿刺另一侧。由于力的传输距离较远,该装置存在一定系统误差。
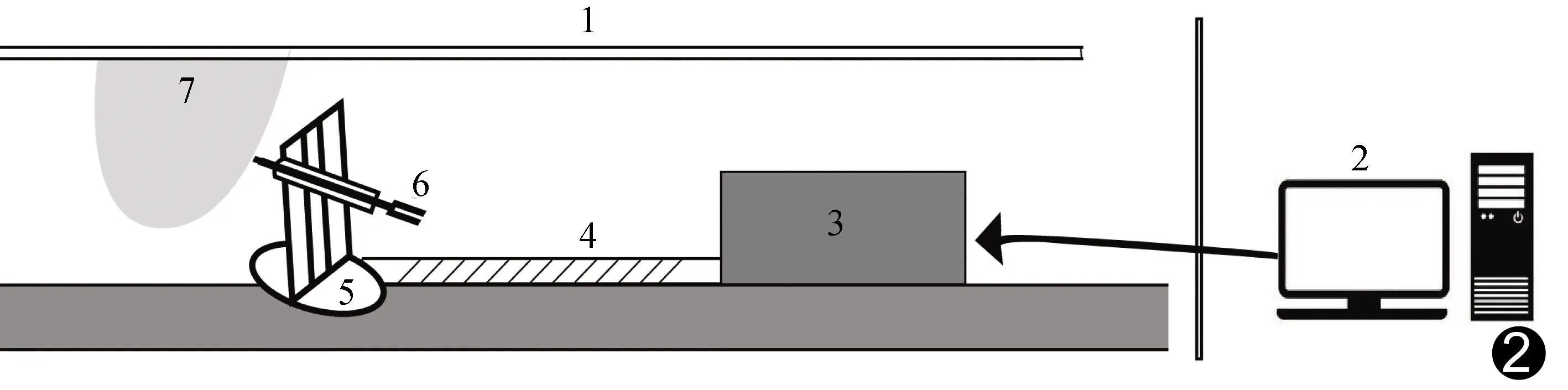
图2 LARSON等[12]设计的MR引导下乳腺穿刺活检机器人示意图 1.患者支撑板; 2.远程控制装置; 3.超声波电机; 4.伸缩轴; 5.角度调节装置; 6.穿刺针及其夹具; 7.乳腺
YANG等[13-14]设计了具有6个自由度的主从式乳腺穿刺活检机器人,利用主机器人来操纵从机器人,由压电式电机和气缸联合驱动,以减轻设备所受磁场的影响,医师可通过MR进行实时扫描,并调整穿刺针的位置和方向,动物实验结果显示穿刺准确性较好。
CHAN等[15]开发的名为IGAR的穿刺活检系统由3个部分组成,即机械臂、穿刺工具集及患者固定装置,其中穿刺工具集采用ATEC公司提供的穿刺系统及真空辅助穿刺活检针,从患者正前方而非侧面穿刺,更适用于狭窄的MR环境;测试结果显示该系统未在MR环境中发热及产生伪影,系统精度为0.2~0.3 mm。
PARK等[16]设计了使用可弯曲穿刺针进行穿刺的设备,其主要特点为穿刺针可以弯曲,因而系统也可从侧面进行穿刺。利用该系统,医师仅需在MRI上标出病灶位置,机器人导航系统自动计算穿刺路径,经医师确认后即可自动进行穿刺。该设备可以整合多种不同MR设备、搭配不同操作装置,将之作为MR引导下肿瘤穿刺活检或消融治疗机器人的组成部分。
NAVARRO-ALARCON等[17]开发了一款不含金属材料、适用于MR环境的乳腺穿刺机器人。大多数乳腺病变位于乳腺外上象限,从外侧进针进行穿刺活检成功率更高。此款结构紧凑、占用空间较小的机器人既可从乳腺侧面、也可从乳腺正前方进行穿刺,可在MR扫描室内、甚至于扫描同时进行穿刺,极大提高了工作效率。
VINCENT等[18]设计了一款名为Stormram的具有4个自由度的乳腺穿刺机器人,使用串联式运动链,占用空间较小,可从患者乳腺侧面进行穿刺;测试结果显示,在MR环境下装配巴德14G(100 mm)穿刺针对乳腺模型进行穿刺时,其定位误差为(1.29±0.59)mm。
国内相关研究亦已取得进展。孟纪超等[19]开发了一种MR环境下具有6个自由度的穿刺定位机器人系统,由磁场兼容材料制成,可满足穿刺机器人与MR环境中的结构与材料兼容性,并实现MR环境下穿刺活检机器人辅助定位,但其机器人悬臂需要支撑其穿刺装置,导致末端负载较大。
娄金龙[20]设计了一种丝传动机器人,可用于MR导航下乳腺癌穿刺活检或近距离植入内照射粒子。丝传动可以实现远程驱动,基于丝传动的设计能够在很大程度上减小机器人尺寸,因而在一定程度上免受MR环境的限制;其有效性已为水凝胶乳腺模型穿刺实验结果所证实。袁小航等[21]设计的新的丝传动绕丝方式解决了丝传动过程中的脱丝及绕丝错乱等问题。
阮彦飞[22]兼顾材料、结构和驱动系统的兼容性要求,采用非金属材料如尼龙、聚甲醛等制作机器人本体,以顺磁性材料如非磁性不锈钢制作活检针等,研发出一款由定位装置、位姿调整模块和穿刺模块组成的具有4个自由度的乳腺穿刺活检机器人,可满足MR环境下的乳腺介入穿刺手术需求。
3 小结与展望
目前MR引导下乳腺穿刺活检机器人研究已取得显著进展。通过采用精密设备、缩小机器人体积以解决MR环境限制问题,应用磁场环境兼容材料应对强磁场的干扰,并以各种不同设计将大部分主要控制部件安置于相对较远位置等,现已将MR环境对穿刺活检机器人的影响控制在可接受范围内,并在体外测试中获得了较高准确率。然而MR引导下乳腺活检机器人仍然面临一系列挑战。目前绝大多数研究关注重点在于机器人模型设计、穿刺建模和控制系统研发,而对于机器人在实际临床工作中的应用,包括体内及体外观察相对较少涉及。受限于医学伦理及技术水平等因素,目前仅有极少数临床试验研究,未有任何研究通过临床认证并实际用于临床实践。
另一方面,随着技术的进步,MR引导下乳腺穿刺活检机器人相关研究日渐深入,设计越来越先进,误差逐渐缩小,与MR环境的兼容性也在逐渐改善。相信不久的将来,MR引导穿刺活检机器人系统乳腺穿刺活检系统将能承担越来越多的工作,为临床早期诊治乳腺癌提供更大帮助。