基于边缘探测器的FM G稳像探测研究∗
2020-07-28郑兆瑛章海鹰曾裔中倪厚坤
郑兆瑛 吴 桢 章海鹰,3‡ 曾裔中 倪厚坤
(1中国科学院国家天文台南京天文光学技术研究所南京210042)
(2中国科学院天文光学技术重点实验室(南京天文光学技术研究所)南京210042)
(3中国科学院大学北京100049)
1 引言
全日面矢量磁像仪(Full-disk vector Magnetograph,FMG)[1]是先进天基太阳天文台(Advanced Space-based Solar Observatory,ASO-S)[2]卫星的主载荷之一,将以高时间分辨率和高空间分辨率进行全日面太阳矢量磁场测量,其目的是研究太阳磁场的浮现、发展、相互作用及其在太阳爆发中的作用,从而深入理解耀斑和日冕物质抛射过程中的能量累积、触发、释放和传输机制,并为空间天气事件预报提供观测基础.
FMG以ASO-S卫星为平台,卫星姿态变化、指向精度、卫星平台的颤振以及仪器内部颤振等因素都会对FMG连续稳定观测产生不利影响.为使FMG光学系统的性能指标能够满足全日面太阳矢量磁场测量的科学需求,在隔振系统、指向跟踪系统之外,FMG自身还配备了一套高精度稳像控制系统.FMG稳像系统测量太阳入射光的倾斜偏差,并利用偏摆镜对其进行实时补偿,从而令FMG获得高空间分辨率的全日面太阳矢量磁场图.
太阳入射光的倾斜偏差探测是FMG稳像的关键技术.偏差探测常用的器件有图像传感器、四象限探测器以及边缘探测器等[3–5].其中,基于图像传感器的方法需对全日面图像求质心或者进行互相关运算,所需计算量较大.四象限探测器利用4个按直角坐标系排列的光电二极管对入射光进行倾斜偏差测量,响应速度快、功耗小,但太阳活动带来太阳像光强分布变化,会影响四象限探测器的探测准确性.边缘探测器与四象限探测器原理类似,不仅具有响应速度快、计算复杂度低以及功耗小等优点,而且仅利用太阳像边缘区域进行偏移探测,避开了大部分太阳活动对探测准确性的影响.因此,在国际空间太阳观测设备上,基于边缘探测器的倾斜偏差探测技术得到广泛应用,例如MDI(Michelson Doppler Imager)[6]、HMI(Helioseismic and Magnetic Imager)[7]等皆在主光路或导星镜的设计中采用基于边缘探测器的偏差探测技术.
综上分析,FMG稳像系统拟采用边缘探测器进行太阳倾斜偏差探测.虽然边缘探测器是稳像系统的关键部件,但边缘探测器性能的相关研究较少.本文将以FMG稳像系统的边缘探测器研制工作为基础,首先介绍边缘探测器的测量原理;然后,根据FMG光学系统仿真所得边缘探测器上太阳像数据,分析边缘探测器的输出特性以及太阳像尺寸对边缘探测器量程和灵敏度的影响;最后,在实验室搭建了一套检测系统对仿真分析进行了验证实验.
2 边缘探测器原理
边缘探测器由位于探测器中心的光锥和4个光电二极管组成,光锥将入射光斑的非边缘区域反射掉,仅允许光斑的边缘区域照射至光电二极管感光面上.边缘探测器中所用的4个光电二极管位置对称,形状面积相同,且性能相同.图1给出了边缘探测器的结构示意图及实物图,结构示意图中灰色的方框表示光电二极管,网状的环形区域为未被光锥反射掉的入射光环,网状区域与方框区域重合的部分为被光电二极管接收的入射光斑.假定P1、P2、P3和P4分别为入射光照射在光电二极管A、B、C与D中的功率,则水平方向上的倾斜偏差xdif f0可由光电二极管A与B接收到的功率之差P1−P2来表示,垂直方向上的倾斜偏差ydif f0可由光电二极管C与D接收到的功率之差P3−P4来表示:

如(1)式所示,当入射光束光强发生变化时,即便倾斜偏差相同,由于边缘探测器光电二极管接收到的能量发生变化,偏差量也会不同.为了解决这个问题,可以对偏差量进行归一化处理,令所测入射光束的偏差量与入射光束的强弱无关.对(1)式进行归一化处理后,可得:
当入射光照射到边缘探测器上时,光电二极管A、B、C与D会因光电效应产生不同幅度的电流信号,经过跨阻放大器后产生相对应的电压信号,分别为V1、V2、V3和V4.且电压信号V1、V2、V3和V4与光电二极管A、B、C和D中的功率P1、P2、P3和P4成相同的比例关系.因此,xdif f和ydif f亦可用电压来表示:

易见,当xdif f为0时,表示水平方向的倾斜偏差为0;同理,当ydif f为0时,表示垂直方向的倾斜偏差为0.即入射光斑中心与边缘探测器中心重合并呈圆环状时,入射光波前无倾斜偏差.此外,为了确保边缘探测器在水平和垂直方向对于倾斜偏差的测量准确有效,入射光斑必须在4个光电二极管上都有分布.否则当倾斜偏差变化时,由于一对光电二极管之一测得能量一直为零,边缘探测器的输出不再变化,从而得到错误的偏差值.
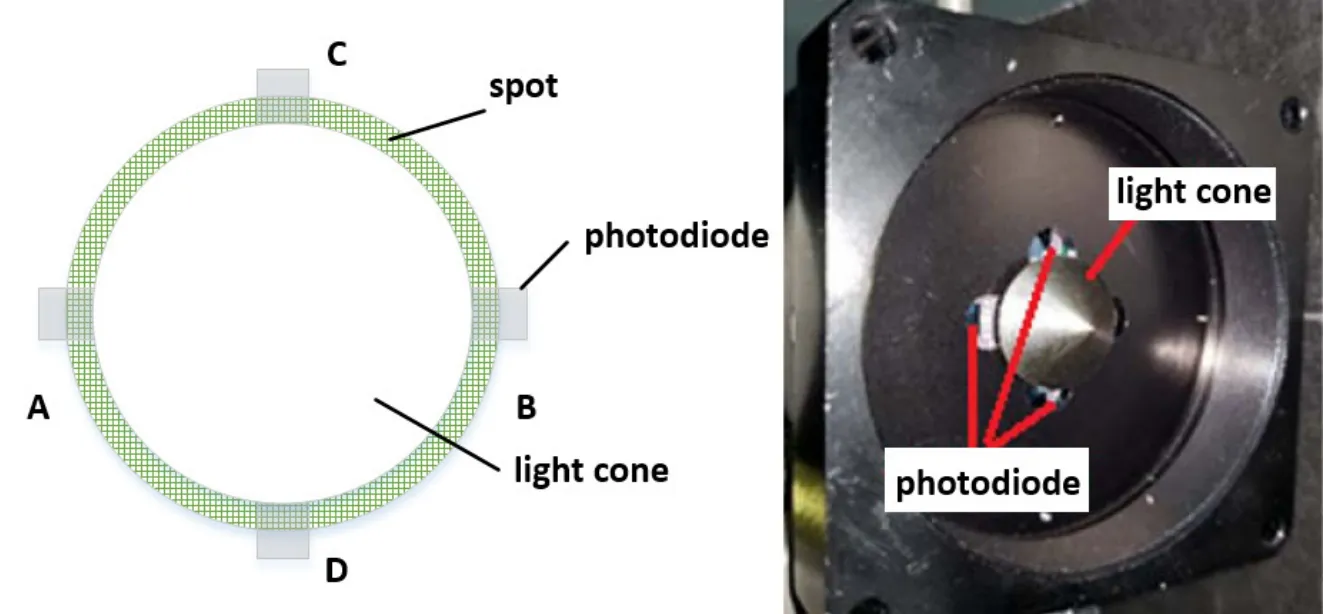
图1 边缘探测器结构示意图与实物图Fig.1 The structure diagram and photo of the limb sensor
由于边缘探测器水平方向与垂直方向原理相同,下文仅针对垂直方向测得倾斜偏差ydif f进行分析.
3 FM G稳像边缘探测器性能仿真分析
3.1 输出特性分析
本小节拟根据FMG光学系统仿真太阳像数据,分析太阳像的线位移与边缘探测器输出的对应关系.FMG稳像系统边缘探测器光锥直径为20 mm,假定入射边缘探测器的太阳像直径为22 mm.图2表示边缘探测器在垂直方向进行倾斜偏差探测的情况,其中左图表示太阳像无偏差,此时太阳像中心与边缘探测器中心重合,所呈圆形光环宽度为W(1 mm);右图表示太阳像在垂直方向存在倾斜偏差,此时太阳像的线位移为d.FMG的观测波长为532.42 nm,太阳像辐照度I(µ)的分布[8]如下:

其中µ=cosθ,θ是日心角,即日面上每点的径向和日心连线的夹角.光电二极管所接收到的功率通过对其感光面积上所接收的太阳辐照度分布积分求得,进而可获知倾斜偏差量.本实验仿真d变化时边缘探测器输出ydif f的变动情况,数值仿真结果如图3所示.
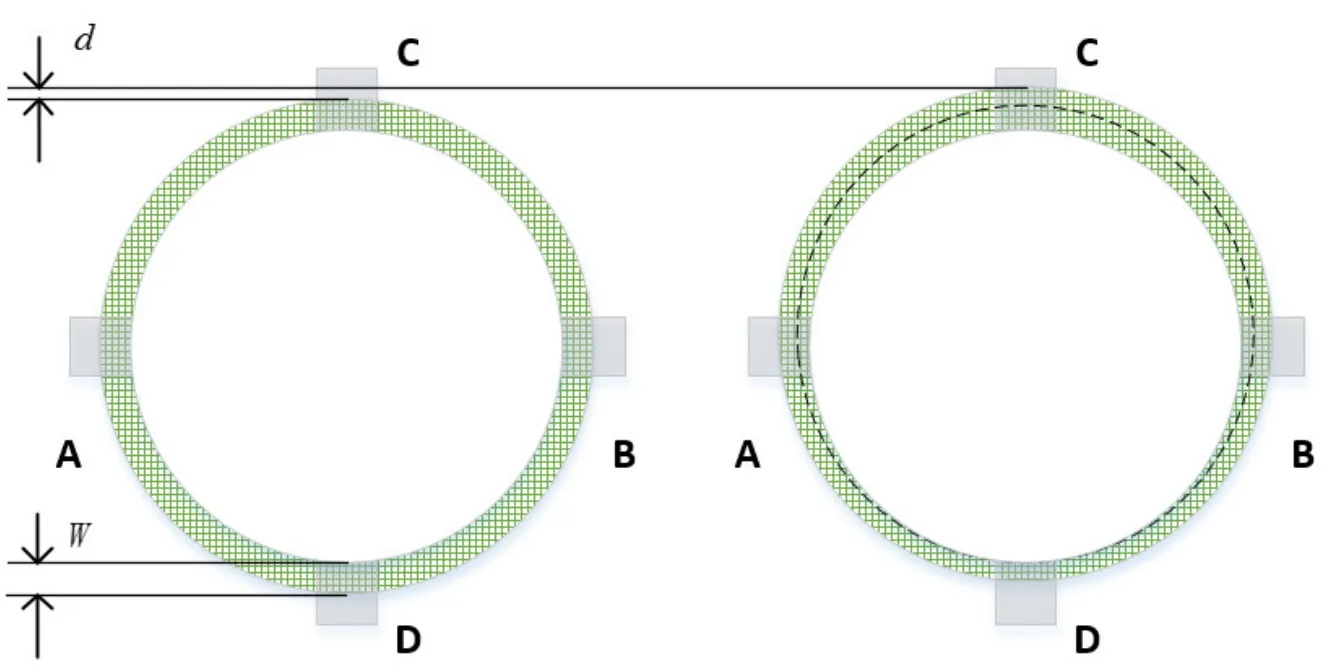
图2 边缘探测器垂直方向倾斜偏差探测示意图Fig.2 The schematic diagram of tilt detection of the limb sensor in the vertical direction
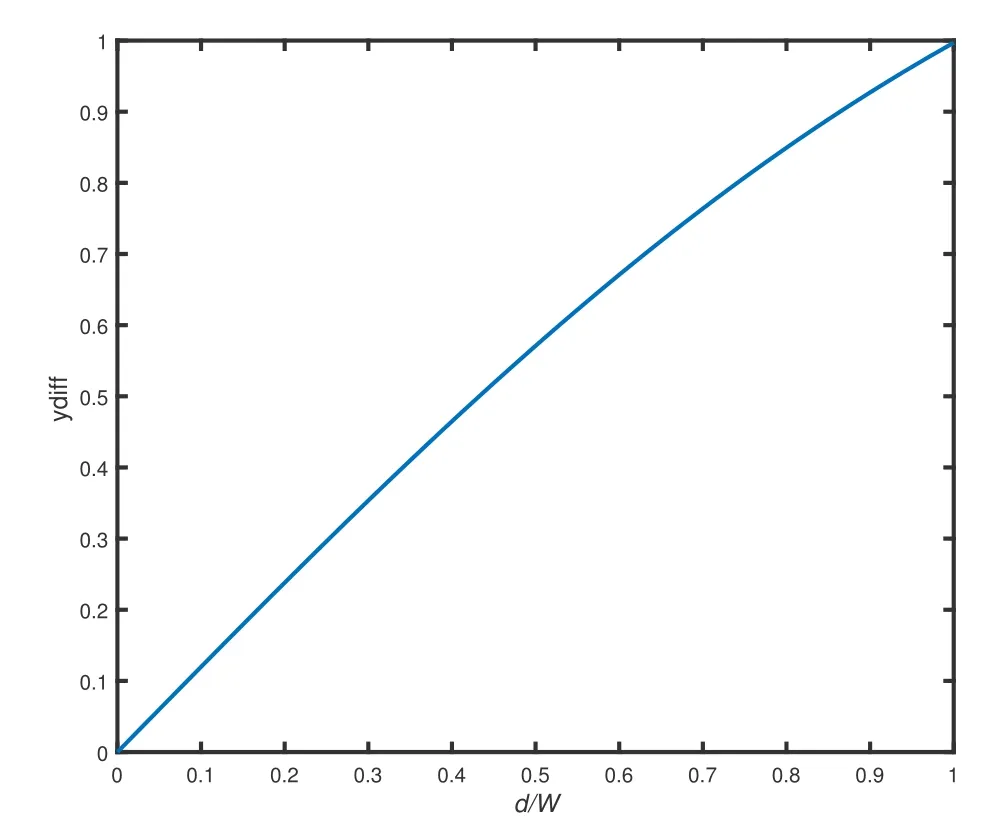
图3 d/W与ydif f的关系曲线Fig.3 The relationship between d/W and ydif f
图3 中横坐标为d与W之比,纵坐标为边缘探测器所测得垂直方向的ydif f.随着d增大,ydif f也逐渐增大.当d等于W时,ydif f到最大值1.此后,d再增大,ydif f保持不变.观察图3中的输出曲线可发现,当太阳像即将偏移出光电二极管时,边缘探测器的输出特性呈现出明显的非线性.在边缘探测器的实际使用时应避免入射光移动到光电二极管边缘的情况出现.若无法避免,也可预先标定边缘探测器的非线性输出曲线并存入稳像系统控制器ROM(Read Only Memory),在使用时对偏差探测结果进行非线性补偿.
3.2 太阳像尺寸对量程和灵敏度的影响
由于FMG随着地球绕太阳进行公转,边缘探测器上的太阳像尺寸会发生变化.此外,FMG选用的调焦轮不同,太阳像尺寸也会不同.根据FMG前期设计仿真结果,当太阳视场为32.6′且FMG调焦轮位于位置1(厚度3 mm)时,边缘探测器上太阳像尺寸最大,为23 mm;当太阳视场为31.5′且FMG调焦轮位于位置7(厚度9 mm)时,边缘探测器上太阳像尺寸最小,为22 mm.因此,有必要研究太阳像尺寸变化对边缘探测器量程和灵敏度的影响,为边缘探测器的实际使用提供理论依据.
当太阳像尺寸最大时,无倾斜偏差时光环宽度为1.5 mm,1′′倾斜偏差对应边缘探测器上线位移为11.86µm;当太阳像尺寸最小时,无偏差时光环宽度为1 mm,1′′倾斜偏差对应边缘探测器上线位移为11.64µm.由上节对边缘探测器的输出特性分析可知,边缘探测器可测得最大线性偏移距离为无偏差时太阳像的光环宽度,故当太阳像尺寸越大,边缘探测器可测得倾斜偏差角的量程越大.
当太阳像尺寸为22 mm和23 mm时,分别仿真计算太阳入射倾斜偏差所引起的边缘探测器输出变化,其结果如图4所示.实线表示太阳像尺寸为22 mm时倾斜偏差与边缘探测器输出ydif f的关系,虚线表示太阳像尺寸为23 mm时倾斜偏差与边缘探测器输出ydif f的关系.当太阳像尺寸偏小时,倾斜偏差与探测器输出关系曲线的斜率更大,边缘探测器的灵敏度更高.
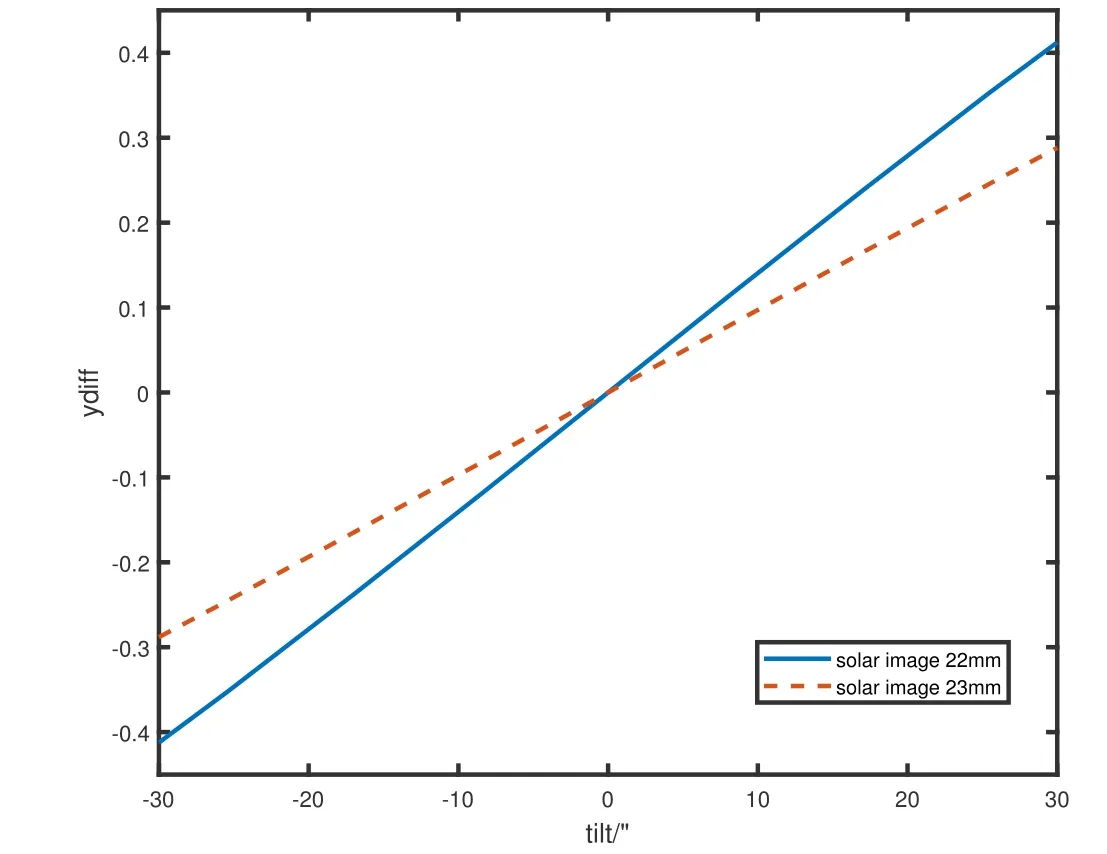
图4 不同尺寸太阳像倾斜偏差与边缘探测器探测输出的关系曲线Fig.4 Relationships between the tilt of the incident light and the output of the limb sensor in the cases of the different sizes of the solar images
4 FM G稳像边缘探测器特性实验
为了验证前述有关边缘探测器的分析是否正确,同时对FMG稳像系统边缘探测器进行性能测试,我们在实验室搭建了一套检测系统对边缘探测器进行了相关实验.
图5为边缘探测器检测实验系统实物图.光源采用Thorlabs宽带卤素光纤照明光源OSL2.光源经聚光透镜后照射在图5中的物上,物为一块分划板,以此来模拟太阳,成像镜将模拟太阳成像到边缘探测器上.边缘探测器光电二极管选用first sensor PS13-6b,光锥底部直径为20 mm.边缘探测器固定在一个高精度三维位移平台上,该平台为Thorlabs PT3/M-Z8,其最小位移增量为0.05µm.本实验利用三维位移平台带动边缘探测器平移模拟太阳入射倾斜偏差的改变,并记录偏差改变时边缘探测器的相应输出进行后续分析.
当模拟太阳像分别为23 mm与22 mm时,分别测得倾斜偏移与边缘探测器输出关系.图6为不同尺寸模拟太阳像倾斜偏差与边缘探测器探测输出的关系实验结果.实线为模拟太阳像尺寸为22 mm时倾斜偏差与边缘探测器输出ydif f的关系曲线,虚线为模拟太阳像尺寸为23 mm时倾斜偏差与边缘探测器输出ydif f的关系曲线.当模拟太阳像尺寸不同时,边缘探测器光电二极管上相同的倾斜偏移,所引起的边缘探测器输出不同.易见当模拟太阳像尺寸偏小时,边缘探测器的量程更小,灵敏度偏高,与前述仿真实验结果一致.
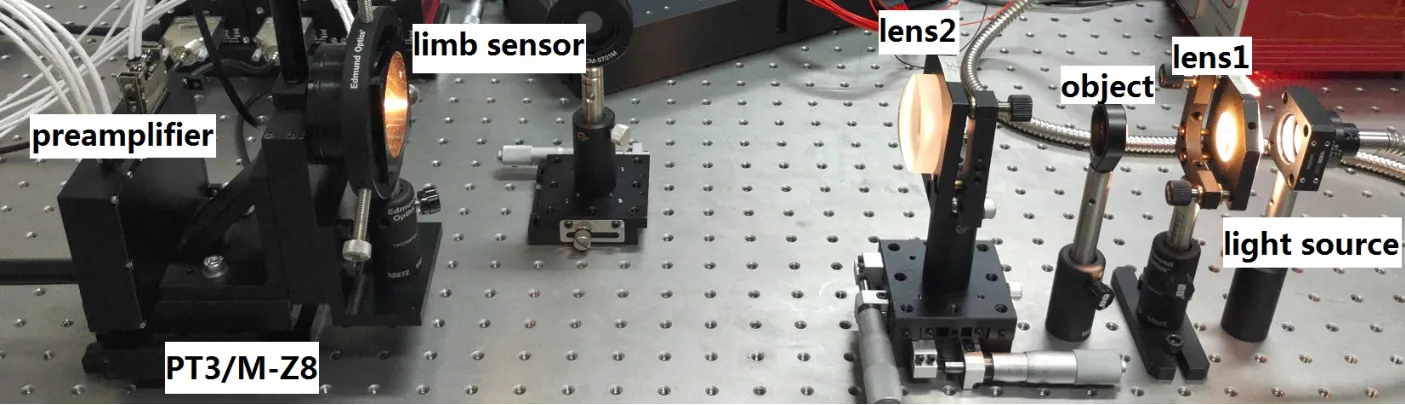
图5 边缘探测器检测实验系统Fig.5 The experimental system for testing the p erformance of the limb sensor
5 总结与展望
稳像系统对FMG实现高空间分辨率观测至关重要,本文主要对FMG稳像系统的边缘探测器展开研究.根据FMG获取的太阳像情况,对边缘探测器的输出特性、太阳像尺寸对边缘探测器量程和灵敏度的影响进行分析.最后,在实验室对边缘探测器特性进行了实验,实验结果与理论分析一致.太阳像尺寸越大,边缘探测的量程越大;太阳像尺寸越小,边缘探测器的灵敏度越高.
根据本文所得结论,在FMG稳像系统研制过程中,用图5所示检测光路,在模拟太阳像尺寸最小时,对边缘探测器的量程进行检测;在模拟太阳像尺寸最大时,分别在0、±6′′以及±12′′处对边缘探测器的分辨率进行检测,因为探测器的灵敏度与分辨率呈正相关.结果表明,所研制边缘探测器相应性能可满足FMG稳像系统指标要求.
未来计划在FMG进行地面观测太阳实验时,实测边缘探测器的输出特性以及太阳像尺寸变化对边缘探测器量程和灵敏度的影响,进一步验证FMG稳像系统边缘探测器的性能.
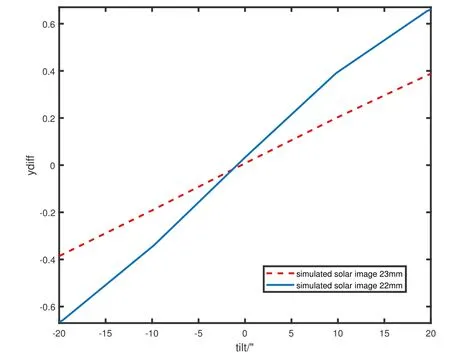
图6 不同尺寸模拟太阳像倾斜偏差与边缘探测器探测输出的关系曲线Fig.6 Relationships between the tilt of the incident light and the output of the limb sensor in the cases of the different sizes of the simulated solar images
致谢感谢中国科学院国家天文台白先勇副研究员提供太阳像能量分布的仿真与实测数据.感谢南京天文光学技术研究所陆彦婷副研究员对论文的帮助.感谢审稿人与编辑提出的宝贵建议.