双层无人售卖储餐柜的设计与分析
2020-07-26席伟伟简洋洋吴宗庆齐光宇
席伟伟 沙 杰 简洋洋 吴宗庆 齐光宇
(河南工业大学机电工程学院,河南 郑州 450000)
随着社会的发展,市场上出现了自动售餐机和用于存放外卖的外卖柜[1]。目前,自动售餐机的品种固定,消费者只能从仅有的品种中作出选择。虽然外卖柜能够很好地弥补目前市场上的自动售餐机在品种上的局限,但是其自身特点多为“一餐一门”的设置,功能单一且不够便捷,不能很好地满足社会的需求。自爆发新型冠状病毒以来,市场对售餐机的需求更是急速增加[2]。为缓解高峰期就餐难,提升就餐品质及效益,拟提出一种新型双层售餐柜。
1 功能需求分析
据了解,消费者对饮食的需求为:即时性需求和多样化的需求。为满足不同的消费群体状况,设备中应能够接收由中央厨房统一配送以及通过网络定单形式配送的餐品。由于存在着两种配送类型,因此,需要进行分区保温处理[3]。其中由中央厨房统一配送餐品区,因配送餐品较多通常采用人工存放;以网络订单形式配送区需存储的餐品数量相对较少,若采用人工存储则会频繁开启设备门,导致热量散失增加电能损耗,因此,设备应能够进行自动存储[4],且识别餐品种类。完成网络定单存储之后应能够短信提醒消费者取餐。
综上,整体设备应具备的功能为:① 线上/线下点餐售卖功能。② 分层保温储存功能。温度设置50~60 ℃保障餐品的热度。③ 自动存储功能。④ 识别功能。⑤ 短信提醒功能。⑥ 输送取出功能。
2 方案设计
根据前述,将双层无人售卖储餐柜结构主体划分为两大部分:升降横移取餐装置和储存装置。储存区域分为上、下双层储餐区域,如图1所示。升降横移取餐装置用于整机餐品的取出,考虑到空间的布置将其设计为由横移和升降平台组成的形式[5]。上层储餐装置的餐品由于是人工存放,因此应将结构设计为输送滚道形式以方便存放。下层储餐装置需具备自动存储功能,其结合市场外柜一餐一格的形式,将下层的结构形式设计为围绕升降存储/推出机构的单格回转形式储存机构,便于餐品区分以及提升存储和取出的效率[6]。对于存储门的布置设计为单门自动存储,易于操作使用和保温。整机对餐品的规格要求为:长≤190 mm,宽≤140 mm,高≤75 mm。

图1 结构主体划分
该设备的工作流程如图2所示,消费者购买时,上层餐品可直接取出,下层餐品需配送员对中央厨房的网络订单餐品进行配送、识别、存储,待消费者接收到短信提醒后,凭购餐二维码/取餐码进行取餐[7]。

图2 工作流程图
3 机构结构设计
利用Solid Works三维软件对设备的主体结构进行建模设计,得到该双层无人售卖储餐柜的主体结构[8],如图3所示。该设备主要由上层储餐装置、自动存储的下层储餐装置和用于整机取货的升降横移取餐装置组成。

1. 上层储餐装置 2. 升降横移取餐装置 3. 下层储餐装置4. 出餐窗口 5. 存餐窗口
3.1 上层储餐装置
为了方便摆放以及增加餐品的摆放数量,提高空间利用率,将结构设计为多层并排的输送滚道[9],并由减速电机驱动,如图4所示。单层有4列货道,每列能够容纳5盒。
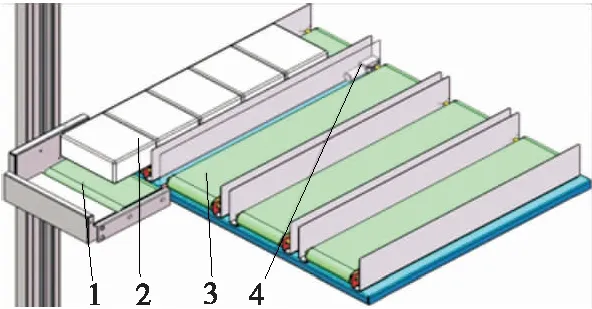
1. 升降取餐平台 2. 餐品 3. 输送带 4. 减速电机
售卖时,伺服电机驱动升降横移取餐装置移动到指定的货道,货道减速电机工作输送,当餐品经输送带移动到升降取餐平台的中间位置时,触发光电传感器信号,货道上的减速电机停止工作,之后取餐装置上的减速电机开始带动输送带工作,餐品到位后再运送至出餐窗口取出。
3.2 下层储餐装置
为了提高存取过程的运行效率,下层储餐装置采用围绕升降存储/推出机构2的结构形式,并以环形导轨支撑,伺服电机驱动[10]。该部分由输送机构1(由输送带及推送机构组成)、升降存储/推出机构2以及储餐机构3组成,如图5所示。

1. 输送机构 2. 升降存储/推出机构 3. 储餐机构
进行存储时,通过输送带将餐品输送至推送机构(见图6)上,当传感器检测到餐品到达指定位置后,推送机构的推板7将需要存储的餐品输送到升降存储/推出机构上。

1. 同步带轮 2. 同步带 3. 橡胶辊 4. 导轨 5. 餐品 6. 导轨滑块 7. 推板 8. 减速电机 9. 齿轮

1. 推板 2. 电动推杆 3. 橡胶辊 4. 齿轮 5. 直线导轨 6. 齿条 7. 电机 8. 减速电机 9. 齿轮 10. 储餐格
升降存储/推出机构集存储和推出功能于一体,其升降过程由丝杠驱动,圆柱导轨导向。餐品存储时,储餐机构进行复位转动,并按照编好的程序工作,在霍尔传感器检测下实现电机制动,使储餐机构转到指定位置,如图7所示,由升降存储/推出机构输送完成对餐品的存放[11]。取餐时,升降存储/推出机构中的电动推杆2将餐品推出(所设计推程为150 mm),使得餐品落在升降取餐机构上,之后取餐工作原理与上层取餐一致完成取餐。
3.3 升降横移取餐装置
3.3.1 升降横移取餐装置设计 升降横移取餐装置如图8(a) 所示,用于整个储餐区域的取出及售卖。该装置的横移过程采用了钢丝绳连接齿形带,由U型钢丝绳惰轮引导下形成的一个闭环传动。结构上能减少电机的使用数量,保证横移时的平衡性以及同步性,同时采用同步齿形带传动无滑动,初拉力较小,能保持准确的传动比,保证了经驱动电机作用下准确快速的实现[12]。装置的升降则采用伺服电机驱动同步带对升降取餐平台进行提升和降落。升降横移取餐装置的运动原理如图8(b)所示。
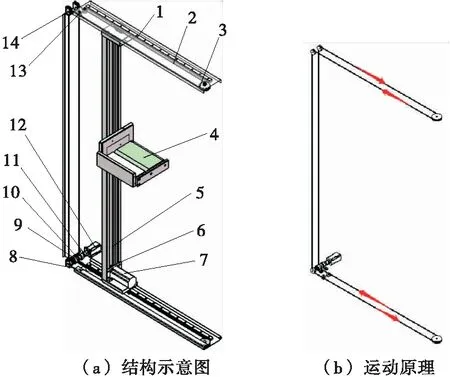
1. 直线导轨 2. 钢丝绳 3. U型钢丝绳惰轮 4. 升降取餐平台 5. 同步带 6. 同步带轮 7. 升降驱动电机 8. 齿形带 9. 轴承 10. 带轮 11. 联轴器 12. 横移驱动电机 13. 钢丝绳张紧导向惰轮 14. 钢丝绳引导惰轮
3.3.2 升降横移取餐装置的优化分析 升降横移取餐装置作为整个售餐柜取餐的关键部分。为验证装置的合理性,同时使得结构紧凑轻便化。采用软件Ansys Workbench 17.0将取餐平台骨架、升降横移板以及取餐平台连接滑块的模型导入[13]。
选用材料为304不锈钢,定义材料性能的弹性模量195 GPa,泊松比0.3,密度7 930 kg/m3,许用应力σs=205 MPa。根据载荷情况为有运动情况,取安全系数为1.2,因此许用应力[σ]=170.83 MPa。经过网格自动划分,其划分的稀疏得当,之后添加约束固定,且加入载荷45 N在取餐平台骨架上。
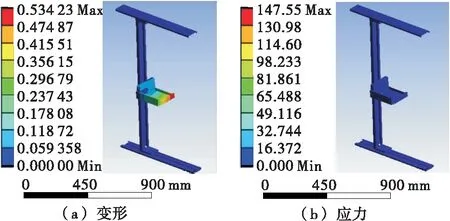
图9 升降横移取餐装置的变形及应力云图
4 控制系统设计
4.1 控制系统方案设计
根据前述的功能需求以及方案设计,结合设备自身情况,如图10所示,双层无人售卖储餐柜的控制采用“智能终端+PLC”为核心的控制系统[14],通过互联网实现设备的人机交互与自动售卖。该控制系统信号输入端有霍尔传感器和光电传感器等,执行元件为电机、电动推杆、加热装置及门锁等主要元器件。

图10 控制系统组成
4.2 核心元器件选型
执行元器件主要针对电机和电动推杆进行选型。电机选用了两类:减速电机及伺服电机。上层储餐装的输送滚道中以及取餐平台都选用了GW31YZ 24V蜗轮蜗杆减速电机,断电时也具有极强的自锁性,功耗低且扭矩大,并搭配E3F-DS30C4光电传感器形成闭环控制,能够准确实现餐品的取出。在升降及横移时,控制位置需要精确的定位,因此,采用制动性能好,启停反应迅速的ECMA系列低惯量伺服电机。电动推杆则选用直流24V JF-20A 笔式电动推杆,其体积小便于安装,并具有双霍尔信号反馈,进行餐品的推出能准确获取推板的位置。
系统中的控制核心PLC选用DVP-64EH00T,能够适应复杂的应用,具备扩展模块,程序及数据寄存器容量大。配有4组200 kHz的高速脉冲输出(每组既能发射脉冲又能控制方向),支持4组200 kHz硬件高速计数器,有多种运动控制指令,以达到高速准确定位控制功能,输出为NPN晶体管型。工作时,PLC通过系列传感器的检测及信号输入控制执行元件的启停。
4.3 控制流程
控制流程如图11所示,系统包含3个模式:① 现场触摸屏选餐模式是消费者线下选餐购买,线上支付后,智能终端通过互联网与服务器通信,最终作用到PLC完成对上层的取货;② 取餐模式则是消费者线上进行购餐,完成配送后,消费者凭二维码/取餐码到设备处进行取餐;③ 配送员存储模式则是中央厨房接到订单后,配送人员进行配送存储,存储时需要经过条形码扫描识别将餐品信息传至上位机,存储过程中每层需系列传感器信号的输入,将每个储餐格进行编排序号,存取工作时需要进行复位,且优先存放在低层,完成存储之后,将会生成短信通知消费者取餐。
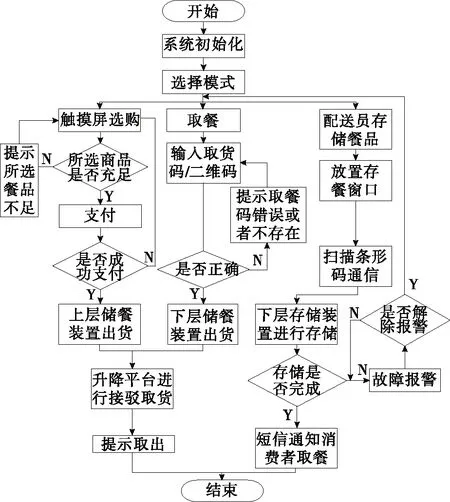
图11 控制流程框图
5 结语
针对目前市场售餐设备不够便捷的状况,设计出了一款与成熟的物联网销售模式相结合的双层无人售卖储餐柜设备。该设备上层结构以并排滚轮货道,下层结构则是具备自动存储的以单格回转形式,控制方式采用“智能终端+PLC”为核心的控制系统,该设备具备现场点餐模式及网络点餐模式,两种模式能够满足消费者即时性需求及多样化需求,为缓解高峰期就餐难,提升就餐品质及效益提供了方案。双层送无人售卖储餐柜当前的控制系统虽然能够满足预期要求,但运行效率还是不够高,因此后期需要通过算法的优化,达到高效存取餐的目的。
