四轮毂电机交叉耦合同步控制策略研究
2020-07-22苏学满孙丽丽汪步云
苏学满,孙丽丽,于 华,汪步云
(1.安徽工程大学机械与汽车工程学院,安徽 芜湖 241000;2.安徽工程大学机器人产业技术研究院,安徽 芜湖 241000)
1 引言
四轮毂电机独立驱动系统中,轮毂电机之间存在速度、位置的相互约束关系,需要采取相应的控制策略,对四台轮毂电机之间的运行同步进行控制。随着轮毂电机技术的日趋成熟,四轮毂电机的同步控制技术具有重要的应用价值。目前,在多电机同步控制方法中,并联控制[1]、主从控制[2-3]和虚拟总轴控制[4]等方法同步性较差;而交叉耦合控制[5-7,11]、偏差耦合控制[8]以及环形耦合控制[9-10]等方法具有较好的同步性能。在并联控制[1]系统中,各电机之间没有耦合,不会响应其他电机上的干扰信号,同步性差;在主从控制系统[2-3]中,从电机的干扰信号也不会激励其他电机的响应,系统同步性得不到保证;在虚拟总轴控制系统[4]中,电机的实际转速与期望速度之间存在误差,致使电机的同步性得不到保证;在相邻耦合误差[8,11]同步控制系统中,仅考虑了相邻电机之间的耦合关系;在环形耦合控制[9-10]系统中,在相邻耦合关系的基础上,建立首尾电机的耦合关系,从而形成耦合环,但耦合关系仍不全面。交叉耦合控制在文献[5-7]中得到了在成功的应用,耦合关系全面,获得了良好的同步控制性能。
通过对上述控制策略的分析,由于四轮毂电机系统中电机数量不是很多,控制算法复杂程度适中,系统的响应速度能够得到保证。采用交叉耦合控制策略对四轮毂电机同步性控制进行研究。
2 同步控制思想
同步控制就是在最短时间内使跟踪误差和同步误差趋于零。跟踪误差是电机实际转速与期望转速之间的差值。同步误差是不同电机的实际速度的差值。在多电机同步控制系统,跟踪误差和同步误差越小,同步性越好。
对于多电机系统的控制,第i个电机的跟踪误差表示为:

ωi(t)—第i个电机的实际运行角速度。
为了实现各电机同步运行,要求在e(it)→0 的同时,使得:

3 交叉耦合模型
四轮毂电机的运动控制系统中,每一电机的动态特性可以描述为:

式中:x˙i(t)—第i个轮毂电机的运行速度;Hi(xi)—惯量矩阵;Ci(xi,x˙i)—离心和哥氏力项;Gi(xi,x˙i)—外部转矩;τi—输入转矩。
四个轮毂电机的跟踪误差分别为:

ωi(t)—第i个轮毂电机的实际角速度。
同步误差εi(t)由电机i跟踪误差与其他电机跟踪误差差值的加权和得到。
式中:Kij—电机i与电机j之间的影响系数。
对于四轮毂电机系统,同步误差表示为:
设:

则有ε=BE,ε 为同步误差矩阵;B为四个轮毂电机的关系矩阵;E为速度误差矩阵。
由定义可知B为对称矩阵,且B的秩为Rank=3。
若同步误差ε 为0,则有方程BE=0。可以得到方程通解为E=[1,1,1,1]T×k
即满足:

从而实现系统运行同步。
4 交叉耦合控制器设计
4.1 控制算法设计
为了实现四轮毂电机系统同步性能,其关键是控制轮毂电机的同步误差和总误差。电机系统的总误差表示为:
式中:βi—常数。构造控制函数ui(t)为:
式中:Λi—正常数。
根据式(4)、式(9)、式(10)可得向量ri(t)为:

设控制转矩τi(t)为:

式中:kri,kεi—正控制增益;Bi—关系矩阵B行向量。
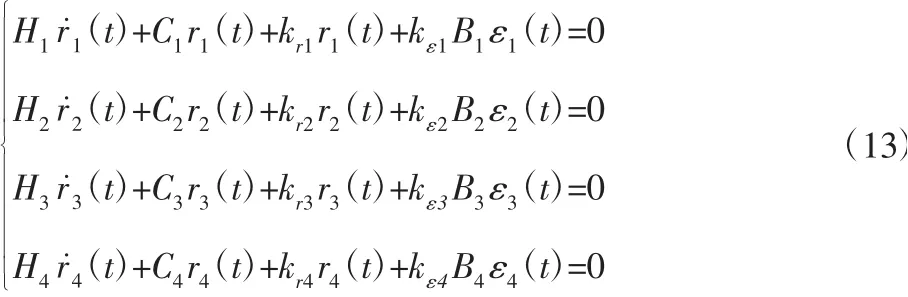
由式(3)、式(11)、式(12)得四轮毂电机闭环方程:
4.2 控制器设计
交叉耦合控制原理图,如图1 所示。轮毂电机1、轮毂电机2、轮毂电机3、轮毂电机4 的同步耦合误差,如图2 所示。这种控制方式的主体思想是分别利用四个轮毂电机的跟踪误差同步耦合误差,把同步耦合误差信号输入速度补偿器,对四个轮毂电机进行耦合误差控制,从而实现四个轮毂电机的同步性控制。其步骤如下:(1)先将轮毂电机的实际速度ωi与给定的期望速度ωdi作差,得各电机的跟踪误差ei;
(2)把得到的偏差跟踪误差ei输入对应的PID 控制器;
(3)将四个轮毂电机的跟踪误差e1、e2、e3、e4作差求和,得到同步误差ε1、ε2、ε3、ε4;
(4)把同步误差ε1、ε2、ε3、ε4输入速度补偿器,与跟踪误差共同控制电机运行。
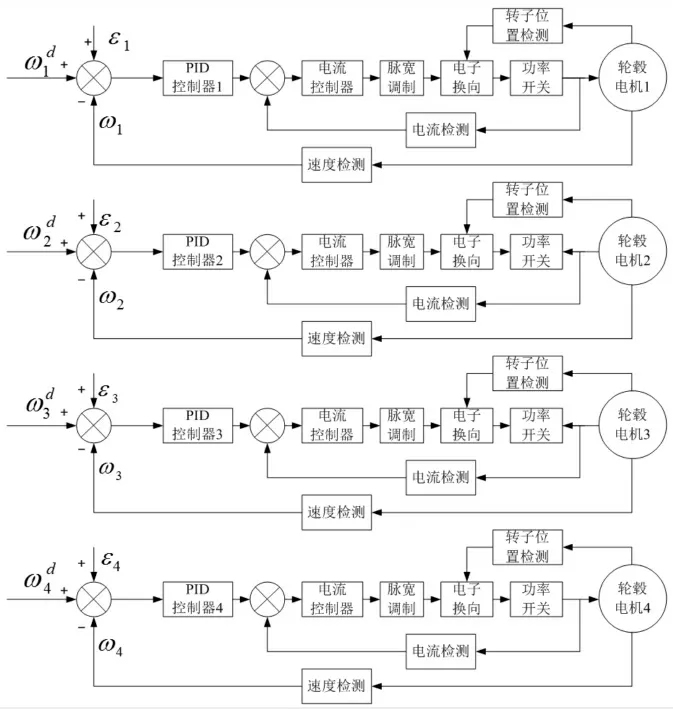
图1 四轮毂电机的控制原理框图Fig.1 The Control Principle Block Diagram of Four Hub Motors

图2 同步耦合误差关系Fig.2 The Relation of Synchronous Coupling Error
5 同步性及同步误差分析
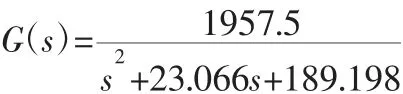
为了验证控制策略的有效性和可行性,首先建立交叉耦合电机数学模型,确定轮毂电机运行的传递函数,根据电机运行方程得为:

式中:KT—电磁转矩常数;Jm—转动惯量;Lm—电感;Rm—电枢电阻;Bm—电机阻尼系数;KE—反电动势常数。根据轮毂电机的具体参数,如表1 所示,则有轮毂电机的速度传递函数为:
设定四个轮毂电机的输入速度为10rad/s,利用matlab 对电机同步性及同步误差进行仿真分析。无干扰时,四个轮毂电机的速度同步性曲线,如图3 所示。其中,速度轨迹,如图3(a)所示。各轮毂电机的跟踪误差轨迹,如图3(b)所示。各轮毂电机的同步误差轨迹,如图3(c)所示。有干扰时速度同步性曲线,如图4 所示。
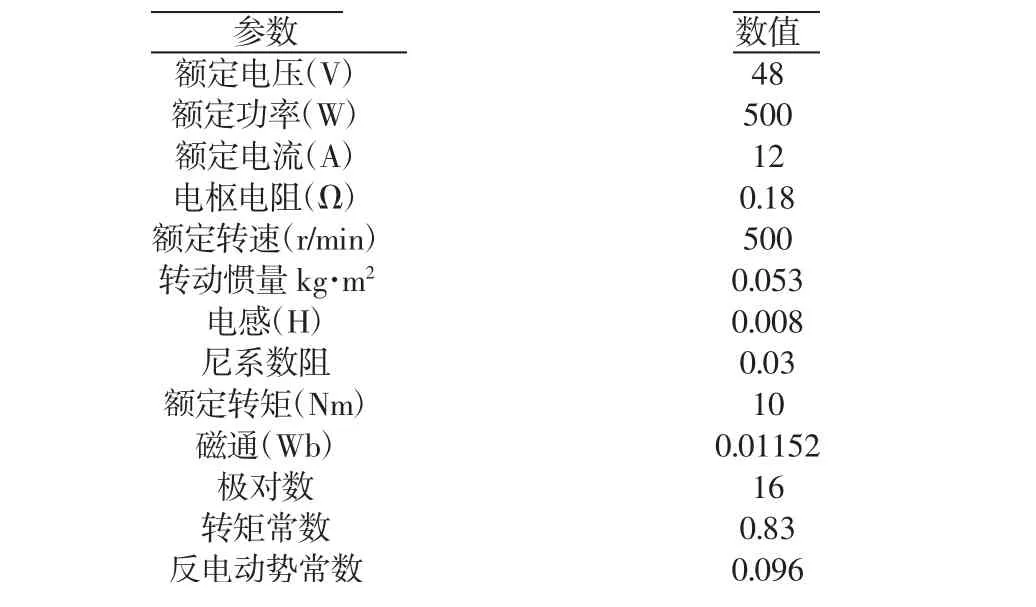
表1 轮毂电机的参数Tab.1 Parameters of the Wheel Motor
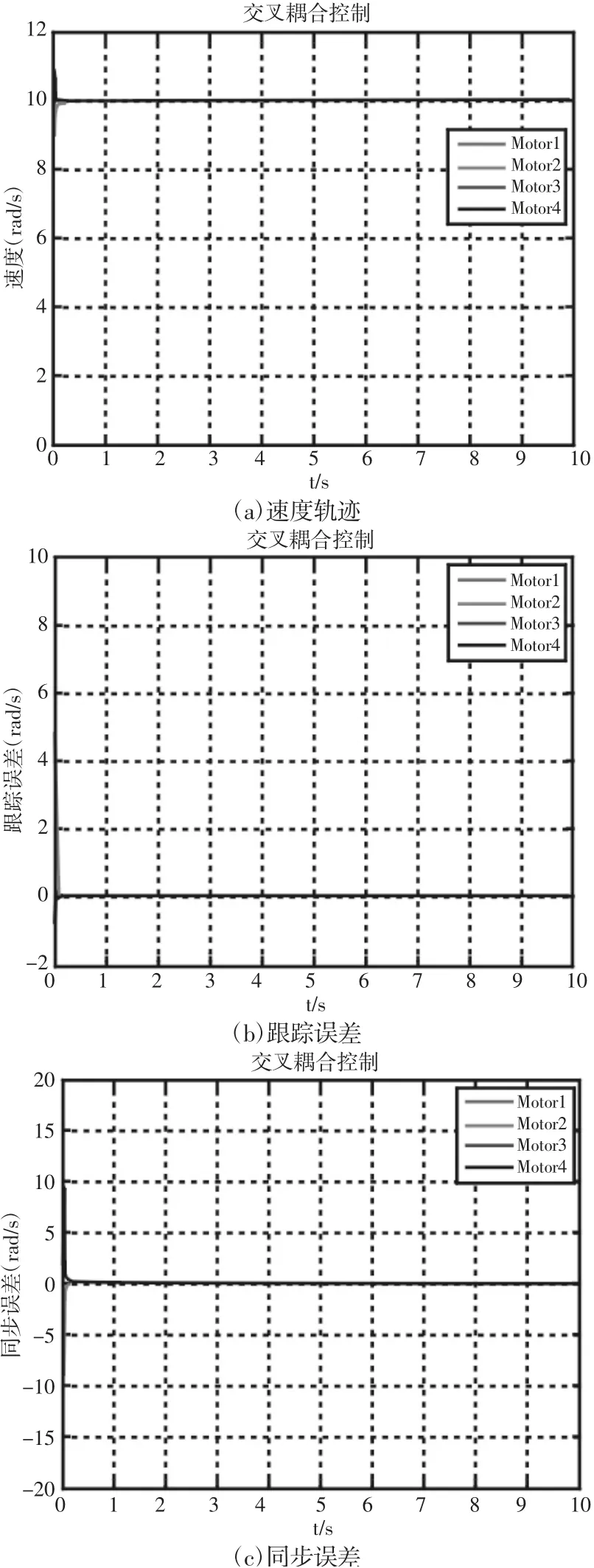
图3 轮毂电机速度无干扰时同步性曲线Fig.3 The Synchronism Curve of Wheel Motor Speed without Interference
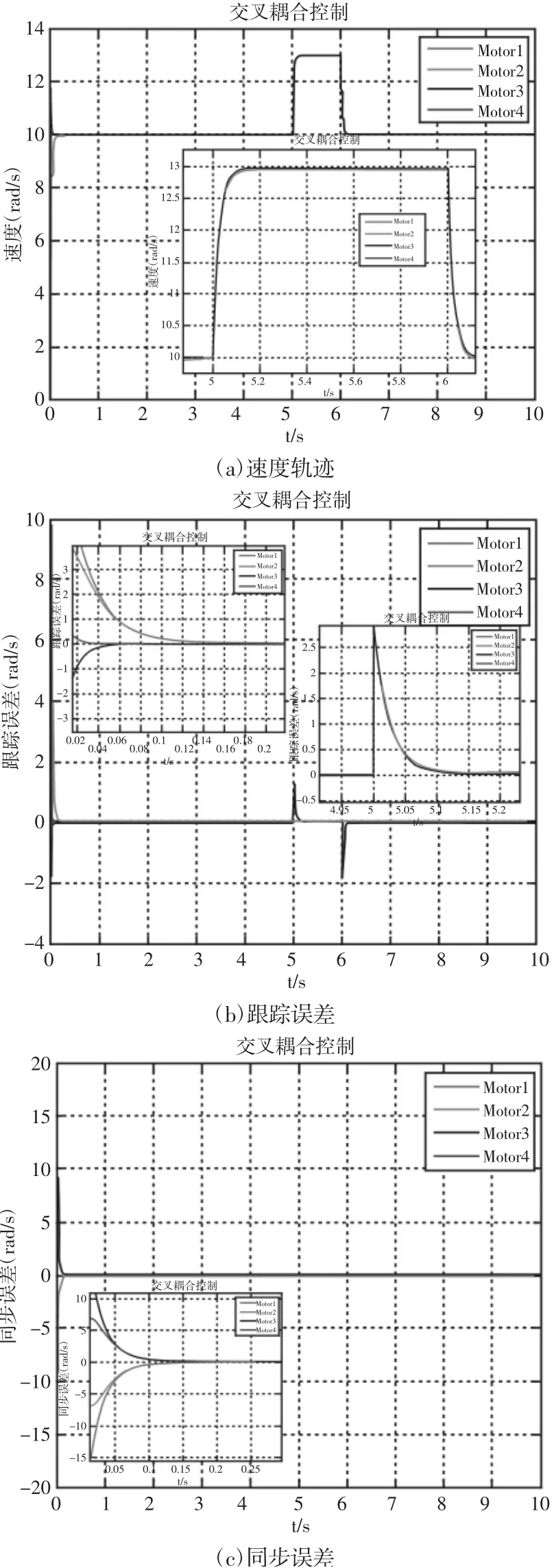
图4 轮毂电机1 速度有干扰时同步性曲线Fig.4 The Synchronism Curve of the First Wheel Hub Motor Speed with Interference
其中,速度轨迹,如图4(a)所示。各轮毂电机的跟踪误差轨迹,如图4(b)所示。各轮毂电机的同步误差轨迹,如图4(c)所示。由图3(a)可得,轮毂电机1、2、3、4 具有很好的速度一致性;由图3b)可得,各轮毂电机的跟踪误差在t=0.15s 时,e1、e2、e3、e4趋于0;由图3(c)可得,四个电机的同步误差也在t=0.15s,ε1、ε2、ε3、ε4趋于0。由此可得四个轮毂电机在无干扰时,其速度同步性好。图4(a)显示,当轮毂电机1 受脉冲干扰信号扰时,轮毂电机2、3、4 与轮毂电机1 仍具有很好的速度一致性;图4(b)显示,各轮毂电机的跟踪误差在t=0.15s 时,e1、e2、e3、e4趋于0,在干扰信号加入时,跟踪误差有突变,但很快趋于0;图4(c)显示,四个电机的同步误差也在t=0.15s,ε1、ε2、ε3、ε4趋于0。由上述分析可得交叉耦合控制策略在控制四个轮毂电机同步运行时,具有很好的同步性和极强的抗干扰能力。
6 结论
通过对交叉耦合控制策略在四轮毂电机系统中的同步性研究,可以得出以下几点:(1)四个轮毂电机速度同步性好,抗干扰能力强;(2)起动后,跟踪误差和同步误差能够快速趋于0,有干扰信号扰动电机运行时,系统能够快速趋于稳定。(3)同步误差的增益系数的调整较复杂,不能实现实时调整。(4)提高交叉耦合控制系统的响应速度,减少计算量以及实时调整同步误差增益系数是未来工作需要解决的重点问题。
