水果采摘机器人运动控制系统设计
2020-07-21李梅
李 梅
(阜阳职业技术学院 工程科技学院,安徽 阜阳 236031)
在我国,农业人工采摘作业一直都是整个农业生产体系中制约其发展的主要因素。水果属于季节性产品,通常需要在很短的时间内,有时甚至是在一两天内就要完成熟果的采摘,这就需要大量的劳动力来完成,完成这么大的劳动力所需要的成本也是较高的。而我国的水果采摘作业绝大部分都是通过人工来完成的,这就会造成极低的采摘效率,且采摘成本也占据了水果成本的60%以上。而随着我国农业的快速发展,因此对于采摘机器人研发具有实践意义。
水果采摘包含了对成熟水果的采摘作业,水果原属以及包装等流程,水果采摘机器人都能够完成上述流程,且机器人也具备非常敏捷的移动能力,对周围的环境以及相关信息具有较好的感知能力,是一个自动编程实现的新型自动化采摘设备。水果采摘机器人运动控制系统设计结合了计算机和自动化技术领域中先进的各种技术,如图像识别、人工智能、传感器等,它的进一步发展不仅能有效的提高采摘效率,还能实现大规模的水果采摘工作。水果采摘机器人的推进发展,不仅能改善我国的水果领域中劳动力缺乏的情况,还能提高生产力,降低企业成本。[1-2]
1 水果机器人机械结构
本文中的机械结构包含了两个部分,主要是移动载体和运动控制系统。移动载体包含了履带式采摘装置、机械臂、采摘辅助装置、末端执行器等;运动控制系统则包含了视觉模型、运动控制模型。
1.1 移动载体
果树采摘机器的机械臂应用的是PRRRP结构,这种结构具备五个自由度,在不同的自由度中实现的功能作用为:提升机械臂、机械臂的中轴绕腰部旋转、轴的旋转、伸缩自由度,这些旋转结构的组合能够使得末端执行器能够朝向任何的方向,而在机器人控制指令下,末端执行器能够精准的实现水果的采摘。机械臂的升降主要是通过升降台来完成的,这就能够适应不同的果树的高度,具有较大的通用性。[3-4]
在采摘行业中末端执行器的主要功能是实现水果的采摘功能,这就要求末端执行器具备较好的灵活性以及便利性,当前市场上已经开发出了多种样式的末端执行器:手指类型、剪刀、吸引器等。本文针对的是圆状的水果采摘,如苹果、梨子等,采用的是一种勺状末端样式的。末端执行器中的夹子被设计为勺子样式,应用气缸来控制夹子的闭合,并在两端配置了一把刀,通过设计在后方的电机旋转来将果柄切断。[5-8]在具体的果实采摘时,首先用夹子将水果夹住,接下来则用刀具将树枝剪断,以此来实现果实的采摘。
1.2 采摘机器人运动控制
采摘机器人的运动控制分为两个部分:采摘部分和行走移动部分。
由于不同品种果树的高度以及果树树冠等都不一样,覆盖树的果实感应也是不一样的,同时需要将机械臂读取到每个姿势下关节脉冲位置参数,接下来则需要通过设置相关传感器采集到的果实位置信息,最后以此来完成对果实的采集。
采摘机器人在路径发生转换后,这就需要对采摘机器人移动进行控制设计。采摘机器人采用四轮进行驱动,因此在移动过程中需要对移动中心进行设置。首先将将四个轮子设定为A、B、C、D,并以此来构建一个矩形,矩形的对角线交叉点设置为O,并将该O点定义为原点,以横向为X轴,纵向为Y轴,得到直角坐标系,由此就可以得到四个轮子的坐标分别为:A=(l2/2,l1/2),B=(-l2/2,l1/2),C=(-l2/2,-l1/2),D=(l2/2,-l1/2),由此就可以得到转弯半径的中心点P的坐标为:P=(R,d),其中R表示其到Y轴的距离,d表示其到X轴的距离,如图1所示。
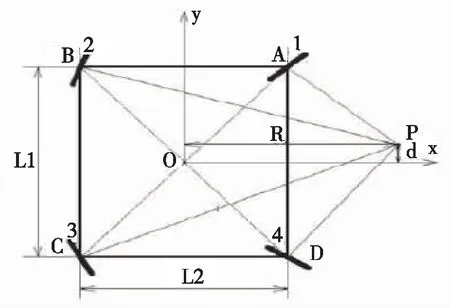
图1 采摘机器人移动半径图
首先,在采摘机器人轮子上均安装了位置传感器以及0点开关,它可以朝向任何的角度进行移动。但机器人的轮子为0°时轮子停止运动;当轮子为±90°,轮子会发生反向旋转;当处于[-90°,0°]或[0°,90°]时,轮子发生旋转作用。
1.3 水果采摘控制系统设计和实现
水果采摘机器人一般为无人自动化操作,这就需要多种传感器来实现。而当机器人在采摘完毕水果后,还能遵循规划路线将水果运输到指定的存储位置,这就要求在一定程度上要对机器人进行运动控制系统。首先需要对主控机进行初始化,并将装置在自动化控制机上的软件连接无线网络实现任务的执行。水果采摘机器人控制系统中主要包含了多个子功能模块,各个子功能之间相互联系实现数据的传送以及处理。[9]
功能主要包含了位置的GPS定位、距离的超声波测量、电机驱动设计、电源管理、数据存储、视觉系统等。如图2所示。

图2 水果采摘控制系统设计
1.3.1 GPS位置定位功能
GPS位置定位功能主要时为了能够实时的获取得到机器人的具体位置,而在数的传输过程中,需要对相对应的GPS信息的格式定义,数据采集和处理操作。
GPS定位模块中要根据系统中的需求输出各种信息,因此这就要对数据的格式进行输出,根据具体格式类型分析数据中是否包含了位置定位信息。GPS模块则会朝着系统接口发送数据信息,以便进行下一步的处理。[10]
GPS定位模块中的数据流协议具有四个部分:帧头($GPS)、数据、位置检验、帧尾。这些数据都需要在系统中进行智能化的传输,以此来提高数据的传输效率和质量。在数据采集过程中,首先则需要判定串口数据是否已经传输成功:失败则直接退出程序,传输成功则会数据帧头处检测到$GPS标识符。接下来则循环接收字符,并根据数据标识符内包含了位置定位信息:位置定位信息有效则会等待下一帧的到来,无效则会中止数据的接收。最后当检测到接收的数据为帧尾位,返回数据已经全部接受完毕,当为非帧尾位,则表示仍需要继续接收数据,并将接收到数据保存到缓冲区内。GPS模块中需要对数据的完整性进行校验和验证,当数据总体和低于字节标准,则将其舍弃。
GPS模块的处理过程如图3所示。

图3 GPS模块流程图
1.3.2 距离超声波测量
该功能主要应用传感器来实现对距离的测量,通过系统控制下,在电源打开后则将超声波反射测量得到的距离发送给数据单元部分。测量数据的获取包括了机器人本身的移动数据,例加速度、速度、角速度、转角的数据等,而这些数据都是通过帧在系统中传输。
数据帧的发送中首先需要对数据的发送进行判别:若没有数据传送,则表示当前无须进行数据的传送,继续等到下一个数据到来;若已经有数据进行了传输,首先需要对帧头的数据读取,判断其是否为ox22。数据判断为ox22,则会将接收到的数据以及后续数据都会写到缓冲区中,并对这些数据进行距离测试运算,以此来确定这些数据是否正确,正确才能直接被系统进行处理;若接收到的数据不是ox22,则表示接收到的数据并非是需求数据,这些数据将会被丢弃,接下来则继续等待下一个数据的到来。如图4所示。
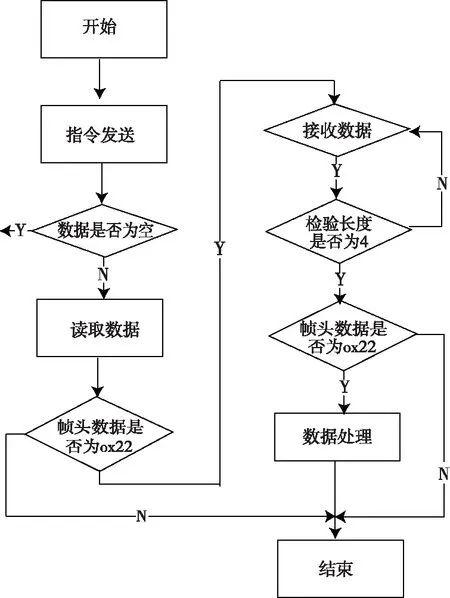
图4 超声波测距流程图
1.3.3 视觉系统
视觉系统是水果采摘的目标图像信息的采集以及处理,也是机器人采摘的重要组成部门。在视觉系统中,首先需要对数据进行精确、快速的处理,接下来则对超声波测距,以此来提高机器人准确获取得到水果位置。其基本原理为:通过摄像头采集到果实的图像信息,获取得到果实的具体方位,接下来则应用超声波测距出来的位置结果,获取果实的采摘位置,并将其映射为机器人的机械臂的采摘角度、速度的控制等,然后应用末端执行器进行采摘。
视觉系统在实践的过程中,首先需要对目标的存在进行探测,解析果实的具体位置来进行空间坐标的确定,并通过机器人和末端执行器之间的相对距离,可实现对机器人的视觉导航。
1.3.4 电机驱动
在电机驱动中,主要实现各个部分的连接以及任务的发送。首先是机器人的无线连接,采摘机器人的无线连接各个部分之间的关系,对保障数据传输的稳定性以及安全性具有十分关键的作用。
首先在电机驱动要对IP的端口进行实时的监听,对后续的指令下达进行检测。接下来需要在电机的控制中,要对采摘机器人的各个不同移动操作下发相对应的指令,如前进、后退、掉头等,而机器人的其它部门在解析完成所要执行的移动命令后,要对执行移动控制指令,同时各类电机要驱动机械结构来完成所对应的移动操作。具体的流程设置为:配置采摘机器人中功能电机中的PID参数,加强对电机的驱动控制,而在电源上电后,要初始化电机为归0操作,促使所有的电机都维持在一个初始的状态,而当移动指令到达后,在解析移动指令后,根据不同的指令执行移动操作,若下发的指令并不包含移动指令,则将其丢弃;当所有的移动指令都已经执行完毕后,会继续进入等待状态直至下一个移动指令的到来。
1.4 控制方案
控制指令对车体移动命令下达包含了两类:人工操作、指定路径。两者所代表的重要程度均不同,因此需要竞争控制来获得指令的优先权。如图5所示。

图5 控制方案设计图
(1)紧急状态以及故障控制命令是指在机器人发生了故障后,该控制命令会直接送达到主控机中,并停止其它所有的操作指令。
(2)手动远程控制命令是指当人工需要对机器人进行控制时,可以通过给主控机发送远程指令操作,主控机则会按照指令执行相关操作。
(3)指定路径控制命令是指在机器运行过程中,主控机会根据当前状态来完成当前的指令操作,并通过接收和解析传感器收集到的数据,驱动电机来执行相关的移动操作。
2 水果采摘机器人系统功能测试
2.1 GPS功能测试
GPS定位模块中能实现动态的接收位置信息,并能随时对GPS定位模块的基础数据进行显示,如图6所示,并根据数据类型进行位置的解析。
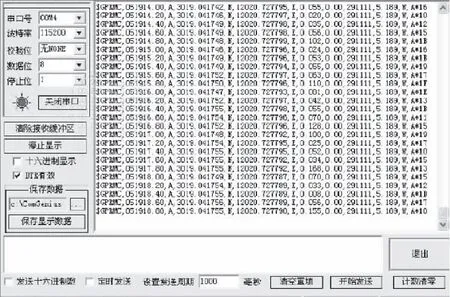
图6 GPS模块解析数据
2.2 超声波测距功能测试
该功能主要为了实现采摘机器人的采摘,能够测量果实的位置,对果实的测量范围有一个较为精确的位置确定。如表1所示。

表1 超声波测距测试结果
由表1可知,超声波测距的精确性在各个范围值内的误差值都不大,都在可接受的范围内,甚至有的可以达到精确值。
2.3 视图系统测试
视图系统的测试中,要对果实的采集进行图像的识别,在识别的过程中首先区分果实和果实旁边
的树叶、树枝等,一般都是通过果实的大小以及形状边缘特性区分,如苹果则是圆形的,一般较大个的圆就能够将其识别处理,而树叶通常则是扁平的,两者之间的区别就直接可以显示出来。表2为图像识别系统中对于各种水果的识别率,通过表2可知水果的识别还是挺高的,这就能进一步促进对水果位置的精确判别。如只有在苹果个头很小的时候才不能识别出来,大部分的苹果都可以直接识别出来。

表2 水果图像识率
3 结论
我国的水果产业已经呈现了产业化、规模化发展,但随着人工成本的增长,则会增加水果采摘的成本。同时水果是季节性产物,在短时间内完成大规模的采摘需要大量的劳动力和高效的工作效率,传统的人工水果采摘模式效率低下,无法满足产业化的采摘,因此采摘机器人的开发则具备非常强的实践意义。本文研究的是水果采摘机器人运动控制系统,通过对采摘机器人的机械结构进行了介绍,分析了移动载体以及运动控制系统的设计。运动控制系统中包含了位置的GPS定位、距离的超声波测量、电机驱动设计、电源管理、数据存储、视觉系统等功能,而在系统测试后机器人能够对位置有较好的控制以及距离的测量,获得了较好的结果。
