交互机器人技术与发展*
2020-07-19潘克刚齐宝峰王欣婷苏耀丁
齐 帅,潘克刚,齐宝峰,王欣婷,苏耀丁
(1.海军研究院,北京 100070;2.中国人民解放军陆军工程大学 通信工程学院,江苏 南京 210007)
0 引言
交互机器人是指利用人机交互技术能够和人类指挥端实现交互的终端机器人。它具有信息传输形式更加多样、拥有更加自主的语音交流和可视化界面以及人工智能程度高等特点。初代工厂机器人与之相比,只能够接受人类控制端的指令,执行特定的机械动作,虽然实现了控制端到机器人端的信息传输,却没有很好地实现机器人端对控制端的信息反馈。从这种意义上说,初代工厂机器人并不能称之为交互机器人。交互机器人的实现不仅要有控制端的命令传向机器人端,也要有机器人端向控制端的信息回传,体现机器人和控制端的交互功能。目前,交互机器人越来越得到人们的青睐,成为机器人发展的重要方向。
1 研究现状
随着科学技术的不断发展进步和人们对高科技产品需求的增强,机器人朝着具有交互功能的高程度人工智能方向迅猛发展。近几十年来,交互机器人的发展应用对人类社会产生了重要影响,下面将重点介绍几种具有典型代表意义的交互机器人。
1966年,为了模仿心理医生与病人聊天的过程,约瑟夫·魏泽鲍姆(Joseph Weizenbaum)开发了聊天机器人ELIZA。聊天机器人使用关键词匹配技术,回复规则虽然简单,但是很好地体现了人机交互技术的特点。
1985 年,Kwoh 利用机器人作为助手进行外科手术,开创了人机交互技术应用于医学临床手术的先河,也为后来更先进的基于虚拟现实的远程手术的发展奠定了基础。医生对机器人的操控和机器人端摄像头对病人情况的回传,是交互机器人的典型特征。
1997 年,“旅居者”探测器(Sojourner Rover)登陆火星,局限于当时的技术水平,“旅居者”探测器的体型较小,最高的行驶速度也仅为0.02 英里,但是依然成功拍摄了550 张照片,为人类对火星的科学探索任务积累了重要素材。随后,“勇气号”等探测器对火星进行了更多次探索,此类交互机器人大大加快了人类对外太空探索的步伐。
2012 年,名为“R2”的宇航员机器人首次被送入国际空间站。此人形机器人的活动范围接近实际宇航员,可以代替人类感知太空的情况,降低人员伤亡的可能性。它感知到的太空的各种性能指标对地面的回传也是机器人交互功能的具体体现。
对于交互机器人的发展,很多与之共同进步的硬件设备作出了突出贡献,其中问世不久的Kinect可以称得上交互机器人的又一次革命。在现有文献中,文献[1]给出了基于手势和语音识别的人造机器人导航系统;文献[2]描述了利用Kinect 远程操作Nao 机器人的开发方法;文献[3]描述了一种基于Kinect 传感器构建本地不确定网格图的移动机器人。
在几十年的时间里已经出现了众多不同类型的交互机器人,服务于社会的方方面面。从近几年的研究成果来看,交互机器人的发展势头依然强劲。
2 关键技术
随着科技的发展进步和软硬件的更新换代,更多先进的技术被交互机器人应用,包括各种新型的传感器。另外,智能交互系统也在交互机器人中扮演着极其重要的角色。下面对交互机器人的关键技术进行具体介绍。
2.1 传感器
传感器是交互机器人发展过程中的重要组成部分,它是机器人的感官系统。利用传感器,交互机器人可以对周围环境有一个客观准确的感知。
2.1.1 传统典型传感器
激光雷达传感器可以使用多普勒效应测量物体的相对速度。使用此传感器,交互机器人可以快速准确地实现信息回传。
新型的电荷耦合器件(Charge Couple Device,CCD)可用于图像传感器,并且具有不需要预热、体积小、重量轻以及造价低等优点。所以,使用基于CCD 器件的图像传感器可以使交互机器人的仿人性能更好,信息交互时用户体验更佳。
目前研制的新型纳米复合材料原位宽带超声波传感器,以炭黑作为纳米填料和以聚偏二氟乙烯为基体。这种传感器重量轻、体积小且具有高灵敏度和超快响应能力,被证明具有与商业压电超声波换能器相当的灵敏度和精度,且在适应曲面结构表面方面具有更大的灵活性[4]。超声波传感器与上述其他传感器一起为推动交互机器人的发展进步起到了重要作用。
2.1.2 新型Kinect 传感器
与传统集成在机器人端的传感器不同,Kinect在控制端使用,通过数据采集、处理并发送给机器人端来实现人机交互功能。
Kinect 使用由微软剑桥研究院研发的基于深度图像的人体骨骼追踪算法,不需要使用任何道具便可完成整个动作的识别与捕捉。使用Kinect 的优势在于:①机器臂脱离了传统的固定位置的限制,可以随着控制员在设定的符合人体学的范围内随意映射动作,从而完成许多设计的复杂任务;②实际操作界面流畅,通过实际操作和计算,可以设置动作跟随时长,使得延迟误差很小又不影响指令的更新;③通过在算法中加入动作锁,可以很好地避免机器人在操作者不知情的情况下出现一些超出预期设计的动作,从而危害机器人本身;④程序的可操作性很强,指令的添加和设计清晰,可以随时进行新的指令和算法的编辑而不影响整体的框架和流程。
有实验结果表明,Kinect 可以过滤一些人的非自愿运动,也证实了Kinect 具备作为运动障碍者辅助技术的潜力[5],使得Kinect 在交互机器人上的使用具有重要意义。
2.2 智能交互系统
机器人利用传感器可以获取外界信息,实现信息的输入。为了交互功能的实现,完成信息的闭环传输,智能交互系统是极其重要的环节。
目前,已经出现许多不同的智能交互系统。蒲巧[6]将能够用来进行英语对话的机器人语言生成当作研究对象,利用基于TF-IDF 的双向交互机器人的语言自动生成方法,寻找到机器人回复人类语音聊天的最佳选择。周菲[7]等人采用滑动时间窗的方法对原始sEMG 信号设计短时能量阈值进行信号活动段始末点的确定,从而抑制了动作刚执行时趋势段对识别结果的影响,然后利用时域统计分析对sEMG 信号进行特征分析,并提出了融合加速度特征信息和sEMG 信号的方法建立5 种手势的分类模型,实现了融合多源信息的手势智能交互系统。曹亚男[8]等人以研究开发一款可实现学习型智能交互的软件为目的,在人机交互的基础上,利用JAVA等编程语言实现文字、语音、表情三方面的交互,同时更具有自学习的功能,并将自学习反过来利用到交互系统,完成了更加智能化的交互系统的实现。
虽然智能交互系统的实现方法各有不同,但是其核心目的都是在特定的功能上实现人机智能交互的功能,达到信息的闭环传输。
3 组成和基于Kinect 的信息交互
3.1 组 成
目前交互机器人大多采用模块化设计。一般来说,交互机器人可以有以下5 个模块组成,分别为驱动模块、机械结构模块、控制模块、无线通信模块和交互信息采集模块。
驱动模块是机器人的关节,为机器人提供动能;机械结构模块是机器人的骨肉,构成了机器人的实物基础;控制模块是机器人的大脑,用以处理信息和发送指令;无线通信模块是机器人的耳朵和嘴巴,用以各分系统间的信息传输;交互信息采集模块是机器人的眼睛和其他感觉器官,用以感知外界信息。通过这些模块使得机器人能够通过人的动作指示,接受指令,按相应的指令完成任务。交互系统总体功能实现框图如图1 所示。

图1 交互系统总体功能实现
3.2 基于Kinect 的信息交互
随着Kinect 的应用发展,基于Kinect 的软件平台被广泛应用。在系统软件设计时,系统软件总体结构随着信息流的流动方式而改变。
在图2 的信息流中,首先利用Kinect 内置摄像头进行信息数据采集,提取骨骼点信息后传送到处理器端进行数据信息处理。指挥端和机器人端利用无线联接,二者使用统一的通信协议,可以利用卫星或者无线WiFi等手段将数据信息传送到手机等,同时信息也会回传到控制端,从而实现完整的信息交互过程。
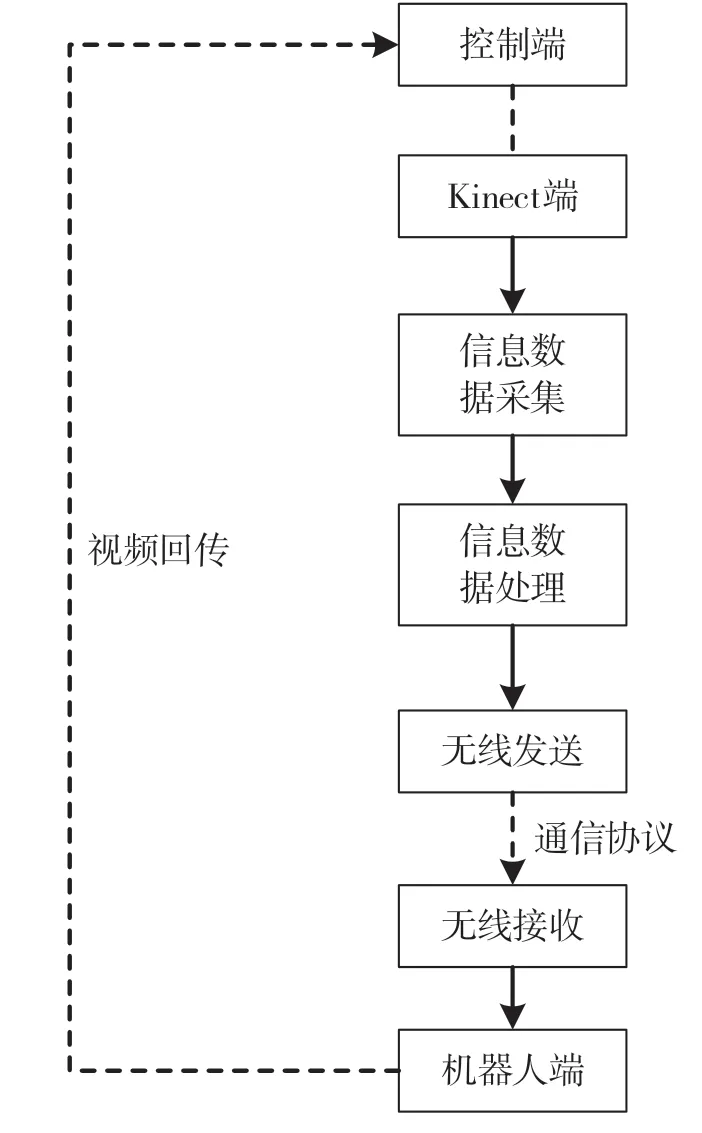
图2 系统信息流
4 交互机器人的发展前景
目前,虽然交互机器人在国内外已有颇多研究成果,但至少在以下几个方面依然具有广阔的发展空间。
4.1 信息处理能力
目前的交互机器人无论是谈话机器人、扫地机器人还是辅导小孩子的玩耍机器人,接收信息的形式都比较单一,对信息的理解能力还很有限。增强机器人的信息处理能力能够使其实现更多的功能,优化用户体验,更好地体现人机交互功能。
4.2 传感技术和集成技术
虽然目前的传感器技术已经比较成熟,但是在现有的基础上研制更灵敏、更先进、更小巧、更智能的传感器,可以推动交互机器人更加精确地感知周围环境。此外,提高集成技术能够在有限的体积上集成更多的元器件,实现更多的功能,有助于增强对信息的提取、处理和传输能力。
4.3 机器人网络化
在即将步入的物联网时代,万物互联是大势所趋。所以,将交互机器人由单一的、有限功能的个体组成功能强大的网络,使人类和机器人在同一个网络里进行信息交互,甚至由机器人和其他物品进行信息交互,是未来需要不断为之努力奋斗的方向。
4.4 深度学习能力
自主判断、推理、规划是智能交互机器人的主要发展方向,而深度学习是实现机器人智能化的重要途径。阿法狗战胜柯洁便是深度学习在机器人智能化方面的重大成就,未来的交互机器人需要更加强大的深度学习能力。
5 结语
经过几十年的发展,交互机器人已经取得了众多璀璨的成果,其存在的技术难题使得一批批技术人员为之不懈奋斗,由此推动了交互机器人技术不断向前发展。本文介绍了交互机器人的研究现状,概括了交互机器人所应用的关键技术,包括传感器、组成模块以及基于Kinect 的信息传输方式等。在交互机器人领域,更多更加大胆的创新精神正在被唤醒,新的技术不断涌现,交互机器人技术的发展必然带给人类社会更大的便利,推动着人类社会不断向前发展。