PID 神经网络控制的手术机器人导管操作系统
2020-07-18周金鹏
马 旭,周金鹏,张 旭,周 琪
(1.天津理工大学电气电子工程学院,天津300384;2.天津职业技术师范学院机械工程学院,天津300222;3.河北工业大学机械工程学院,天津300401)
预计血管介入手术方式在未来的医疗实践中会受到越来越多的欢迎,因为它既可以用于诊断又可以用于实际手术. 但是,一项新技术如果需要发展,那它就需要很多相关技能互相配合.此外,该操作在人身体内执行,所以就不能够直接监测到导管的实时状态.更多的时候,需要具有丰富操作经验的医生进行手动插入导管工作[1-2].在传统介入手术中,导管是通过患者的股动脉血管插入,在这个过程中任何的细微错误都会伤害到患者并造成血管永久性损害.根据手术经验判断,成熟的神经外科医生可以在手术中达到约2 mm 的操作精度.但身体内血管壁和手术导管之间的接触力是不能直接被医生感知到的.并且在手术过程中长期使用X 射线照相机,会造成对患者造成辐射伤害.而且医生虽然穿着铅保护服,但面对来自X 射线的辐射,使医生的身体完全免受辐射也是很实现的.为了克服以上的问题,需要更好的手术方案和配套设备来帮助和培训外科医生.手术机器人导管操作系统的优点是具有很高的控制精度,并且可以远程控制.但与人手相比,没有一个机器人操作系统可以满足血管介入手术治疗的所有技术要求.不仅因为机器不像人手那么灵活而且也因为缺乏合适的力触觉反馈[3].
在这方面,国外出现了很多类似的应用产品和研究成果.其中一种比较受欢迎的产品是Da Vinci机器人导管推送系统.该Da Vinci 系统相比于手工工具,可以为医生提供更多的系统稳定性和在导管推送时提供更大、更好、更稳定的力量支持,并且在医生进行更精确的手术操作时,可以防止医生暴露于不必要的辐射中[4].
Sensei Xi 系统在2007 年分别获得了美国FDA和欧盟CE 认证,该系统主要用于心血管介入手术辅助过程,外科医生通过操作具有力反馈的医疗设备,远程控制导管手术机器人对医用手术导管的推送和旋捻工作,并且医用导管末端装有可以采集力信号的传感器,该传感器可以让外科医生在远程操作中感受到导管与血管壁之间的力变化,以实现对手术导管的灵活操控,确保手术安全性[5].
手术机器人导管操作系统的核心功能是导管的推送环节、血管内导航以及导管推进过程中的导管从端力反馈和实现主端的触觉感知.国内地北京航空航天大学和中国科学院自动化所就导管推进机构和导管末端力反馈等方面开展了相关内容的研究,但目前还未形成商用产品[6].
在本研究中,根据介入血管手术的技术要求,设计了一个新型的手术机器人导管操作系统.与上面提到的机器人系统相比,的系统是由具有两个自由度的主端操作器和一个可旋转的从端操作器组成的.RCMS 有一个主端操作器,通过力传感器、扭矩传感器、直流电机、步进电机和DSP 共同作用决定从端手术导管的位移距离和旋转角度,同时把从手术导管末端采集到的力信息反馈给主控制台的操作人员,完成手术导管的旋转和插入工作.
1 机器人导管操作系统
RCMS 的结构设计分为主端和从端. 主端是外科医生的控制台,从端是手术导管进行实际操作的部分.这样的设计是为了保证外科医生控制台的可移动部分和导管操作端的可移动部分可以保持相同的位移、移动速度和旋转角度.因此,外科医生就可以在远离辐射的地方平稳而轻松地操作该系统并进行介入手术.系统主端和从端都采用DSP 作为其控制单元.主端和从端之间的通信是一个基于互联网的通信,通信的示意图如图1 所示.发送主端操作器机械手柄的轴向位移和旋转信息到从端操作器,并实现同步运动.与此同时,从端操作端发送通过导管末端采集到的力信号给主端操作器.通信波特率设置为19 200 B/s[7-8].
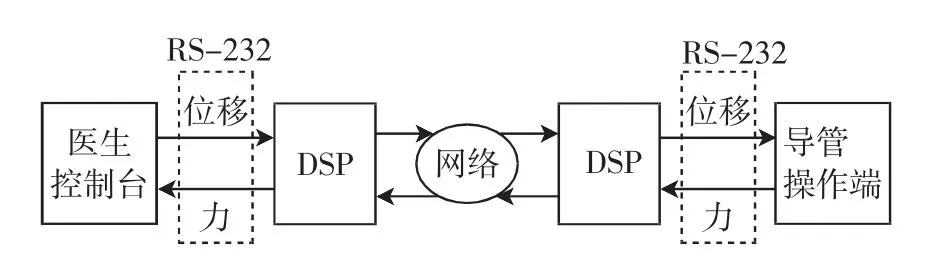
图1 通信示意图Fig.1 Communication diagram
1.1 主端操作器
主端操作器的机械结构如图2 所示,整个机器人手术系统的主端都是由有经验的外科医生进行操作的.外科医生使用控制台执行手术操作,因为导管的夹紧动作是由一个夹子进行的,主端左手柄上放置一个开关按钮用来控制导管操作端的两个夹子.右侧的手柄用于检测外科医生的具体操作,该系统的导管操作端的可移动部分与主端操作器右手柄保持一样的动作.正确的手柄结构可以测量到外科医生手的两个动作:一个是轴向位移运动,另一个是径向旋转运动.该手柄由一个与传感器相联的轴承组成,手柄上还固定有两个保证同步运动的皮带轮.使用带编码器的直流电机(电机1)产生转矩反馈,这个电机被固定在滑轮上.所有部件都放在一个滑动平台上由步进电机(电机2)驱动,实现位移运动.
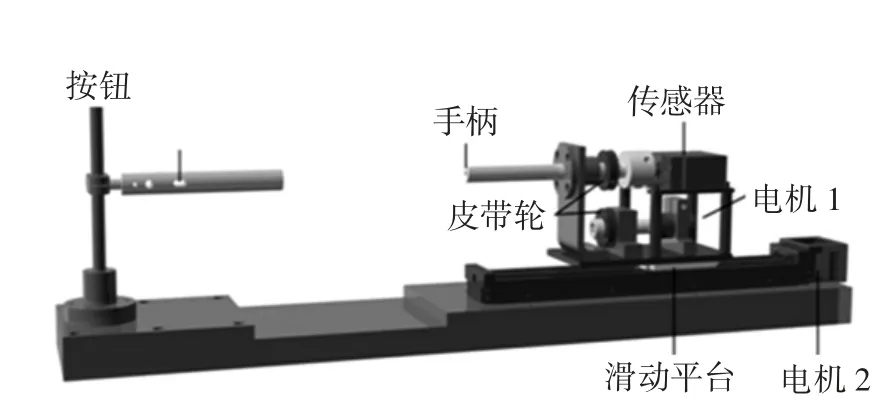
图2 主端操作器机械结构Fig.2 Master operator mechanical structure
1.2 从端操作器
图3 是从端操作器的机械结构,这个部分是放在患者旁的.手术导管通过这种设备进行实际插入[9].这部分机械结构包含两个自由度:一个是轴向位移的框架,另一个是径向旋转的框架.这部分结构安装了两个夹子.当外科医生通过主端驱动手术导管沿轴向移动和径向旋转时,导管由夹子1 夹紧,这时导管保持其位置.当导管被夹紧时,导管驱动部分可以通过夹子2 自由移动,并进行手术导管的插入工作.

图3 从端操作器机械结构Fig.3 Slave operator mechanical structure
2 控制算法
2.1 基于神经网络的PID 控制算法介绍
图4 显示了神经元工作的简单模型,经典的“M-P 神经元模型”. 在该模型中,神经元接收来自通过加权连接的n 个其他神经元的输入信号.然后通过“激活函数”处理和比较,之后产生神经元的输出y[10-11].

图4 人工神经元模型Fig.4 Artificial neuron model
为了提高传统PID 控制器的控制效果,引入了智能控制算法,与传统的PID 控制器相结合. BP 神经网络算法作为一种经典的智能优化算法,具有分布式存储,并行处理和自学习能力等优点,弥补了传统PID 控制器的不足[12-14].
图5 显示了BP 神经网络PID 控制器系统的控制框图.它是传统PID 控制器和BP 神经网络的有机结合.输入信号y*(t)通过BP 算法的自学习特点,改变神经网络中的每层的权重值,进而自整定PID 控制器的三个参数,有效解决电机PID 控制参数不能根据周围环境的变化而达不到理想控制效果的问题.

图5 基于BP 神经网络的PID 控制系统Fig.5 PID control system based on BP neural network
每个部分的详细分析如下:
1)BP 神经网络部分.
BP 神经网络部分是BP 神经网络PID 系统的核心组成部分[15].其主要功能是通过BP 算法的自学习和自适应能力调整神经网络中各个神经元的加权系数,然后调整PID 控制器的三个控制参数,优化整个控制系统的性能.BP 神经网络中输入层的输出信号对应于传统PID 控制器的Kp,Ki和Kd三个参数.参数输出如图6 所示.

图6 Kp、Ki、Kd 参数的智能调节输出Fig.6 Intelligent adjustment output of Kp、Ki、Kd
2)传统的PID 部分.
BP 神经网络只是一种抽象的优化算法,电机的实际控制仍然依赖于传统的PID 控制器[16].因此,传统的PID 部分是BP 神经网络PID 系统不可或缺的一部分.电机的具体控制仍取决于传统PID 控制器的闭环控制,保证电机的速度输出跟随输入.
2.2 算法仿真
以血管介入机器人的轴向运动为例,进行动态分析.根据牛顿第二定律,建立了介入机器人轴向运动的动态模型:

其中,f(t)是电机驱动力;x(t)是运动的位移;(t)是运动速度;(t)是运动加速度,公式(1)说明关系电机驱动力和输出位移.
如果x1(t)=x(t)、x2(t)(t),则

式中,m是推进机构的轴向运动的质量;c是推进机构的阻尼系数;k是推进机构的弹性系数.从公式(3)可以得出结论,推动装置的轴向运动的传递函数是

以介入机器人的轴向运动为例,步进信号y=1用于模拟医生实际操作期间主手导管的轴向预期位移. 取公式(3)中m= 1 kg,c= 0.05 N/(m/s),k= 1.5 N/m.在MATLAB 仿真之后,获得了图7 所示的仿真结果,并且结果表明在BP 神经网络中有比较好的控制效果.

图7 仿真结果图Fig.7 Simulation result
图7 是基于BP 神经网络PID 控制器与传统PID 控制器的仿真比较.
超调量(overshoot)是控制系统动态性能指标中的一个,是指输出量的最大值减去稳态值,再与稳态值之比的百分数,即

其中,(tp)为系统输出量的最大值;y(∞)为系统的稳定值.从结果可以看出,在传统PID 控制下的系统超调量远大于为20%,在基于BP 神经网络的PID 控制下的远小于20%. 与传统PID 控制相比,基于BP神经网络的PID 控制在调整时间和响应速度也大大提高.
3 实验验证
首先,使用传统PID 控制器在远程控制操作期间执行基本实验.在这种情况下,可以通过实验获得控制器的性能特征.然后使用新设计的基于BP 神经网络的PID 控制器来进行相同的实验,并进行实验分析.通过传统PID 控制器轴向位移获得的实验结果如图8 所示,位移误差如图9 所示. 通过图10所示的基于BP 神经网络的PID 控制器获得平滑而且没有过冲的位移响应,位移误差如图11 所示. 两个控制算法的误差极值和误差均值在表1 中.
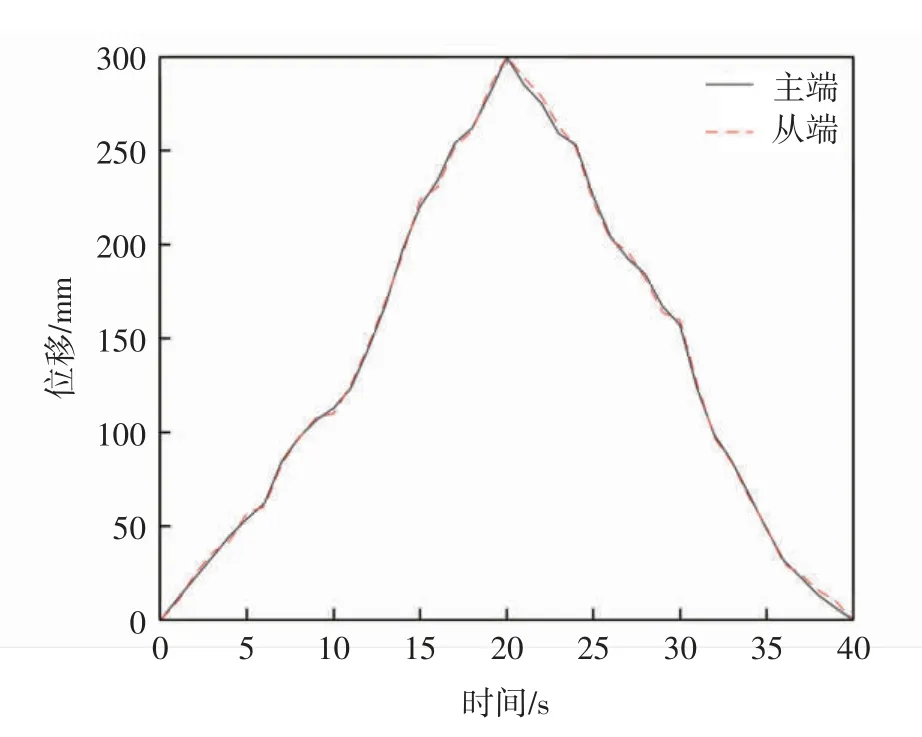
图8 传统PID 控制器的轴向位移Fig.8 Axial displacement of traditional PID controller
如图9、图11 和表1 所示,传统PID 控制器存在很大误差,并且跟踪性能也比基于BP 神经网络的PID 控制器差. 然而,基于BP 神经网络的PID 控制器虽然表现良好,但由于远程操作存在一定时间延迟,它还是会有一些误差.

图9 传统PID 控制器的轴向位移误差Fig.9 Axial displacement error of traditional PID controller
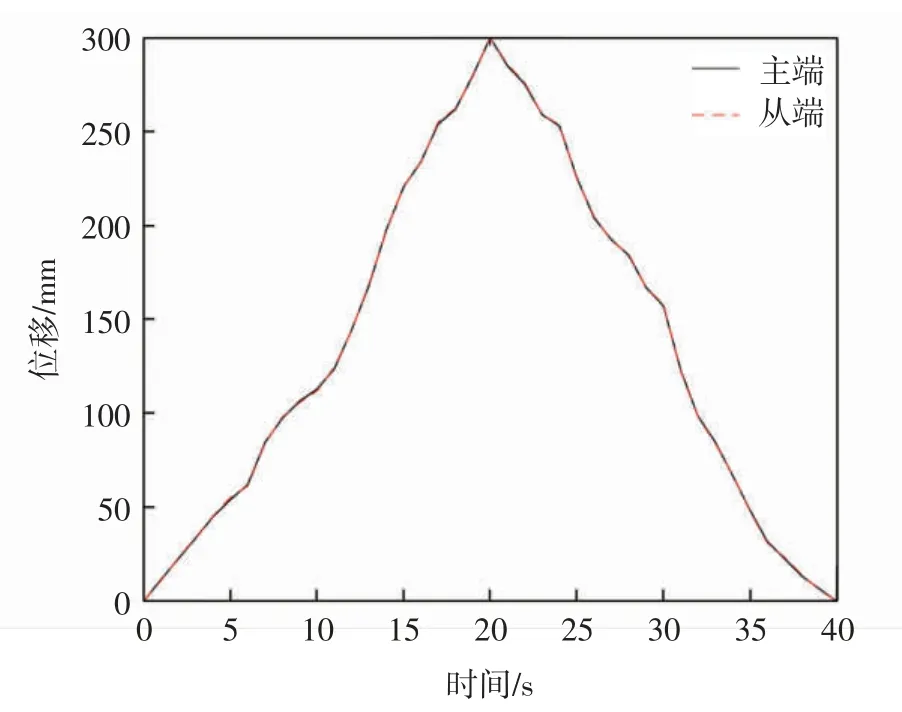
图10 基于BP 神经网络的PID 控制器的轴向位移Fig.10 Axial displacement of BP neural network PID
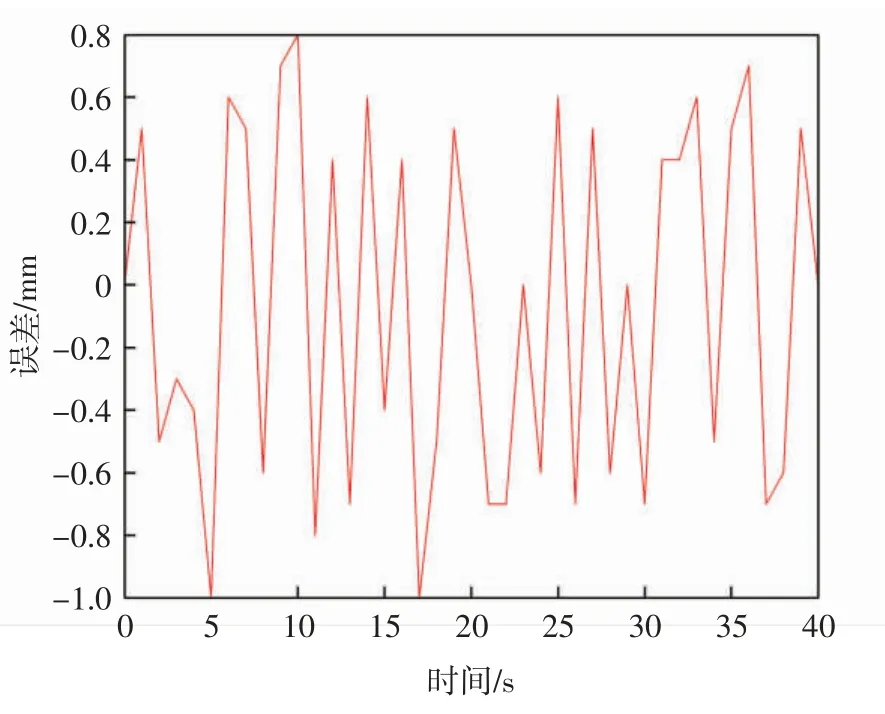
图11 基于BP 神经网络的PID 控制器的轴向位移误差Fig.11 Axial displacement error of BP neural network PID

表1 控制方法误差对比表Tab.1 Control method error comparison table
4 结 论
本文提出了一种新型机器人导管操作系统. 引进了一种新的智能控制算法--BP 神经网络,并针对导管操纵系统从端,设计了基于BP 神经网络的PID控制器,改善了远程操作过程中轴向运动的精度,与传统的PID 相比,所提出的基于BP 神经网络的PID控制器在基础实验期间的响应更迅速.
在远程操作过程中,基于BP 神经网络的PID 控制器的轴向跟踪误差小于1 mm.虽然由于时间延迟在旋转和轴向运动方面也存在一点误差,但它也可以满足微创手术在实际应用中的应用.实验结果证实了新的控制方法更适合使用和理解.
在未来的工作中,将重建机器人导管操作系统的旋转运动动力学模型,以提高精确度,并通过光纤传感器和磁传感器重构力反馈结构,以获得手术导管的血管内力(接触力和摩擦力)和血管内位移的精确信息.
