基于MATLAB 的7 自由度液压重载机械臂的工作空间分析
2020-07-18毛龙锐曹秀芳胡同海杨柳松王收军
毛龙锐,薛 涛,曹秀芳,刘 楠,郝 兵,胡同海,杨柳松,王收军
(1.天津理工大学机械工程学院机电工程国家级实验教学示范中心,天津市先进机电系统设计与智能控制重点实验室,天津300384;2.中信重工股份有限公司,河南 洛阳471003)
磨机是选矿厂的核心设备之一,磨机衬板更换是选矿磨机的一种常态化维护工作.衬板更换效率直接影响到磨机的运转率及经济效益,国内现在一般采用半机器化+自制工具来完成安装工作的,这样会导致设备运转率难以提高,同时由安全风险产生的意外成本会增加,以及人工成本会越来越高的趋势,最后完成衬板更换的综合成本也会不断增加.随着科学技术的发展,机械化作业技术日益成熟,采用机械手执行衬板换装的应用日趋广泛.它的优势在于:(1)机械化程度大幅度提高,参加作业的人员减少;(2)减少衬板更换时间,提升磨机运转率;(3)安全性能较高,使衬板作业变得轻松了;(4)采用机械手更换的衬板尺寸较大,这样就可以减少衬板的使用数量了.自由度数越高的机械手能够在空间所能实现的位姿更多,这样在衬板更换安装的过程中就能够更加准确精密的到达安装工位.
1 液压重载机械臂整体设计
1.1 结构设计
本文的研究对象是具有7 个自由度的机械臂结构,其结构示意图见图1,能够满足最大夹持负载不小于3 000 kg、额定负载下最大运动速度不小于0.2 m/s 和末端重复定位精度优于0.4 mm 的要求,面向重工和航天领域进行应用验证并形成产业化[1].
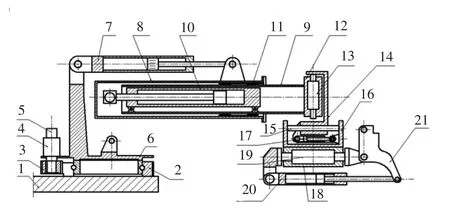
图1 液压重载机械臂结构示意图Fig.1 Structural diagram of hydraulic heavy load mechanical arm
液压重载机械臂主要由驱动结构和执行机构以及连接杆三大部分组成.驱动机构都是由液压驱动元件组成的,其中,主要的液压驱动元件有液压马达5、变幅缸7、伸缩液压缸10、平摆液压马达12、进退油缸17、滚摆液压马达18、俯仰缸20 等组成的,这7个液压驱动元件分别驱动机械臂的一个自由度,同时又能够相互协调运行,能够让机械臂的末端执行机构获得较高的定位精度.执行机构见上图的抓手21,是整个机械手臂的主要机构,它的主要作用就是在衬板更换安装的过程中夹持衬板以及安装对正,具备横面摆转、立面俯仰、纵轴滚摆、纵轴进退等运动功能;衬板夹持、扶持等衬板姿态稳定辅助动作,对于不便夹持的衬板,会设有吊环用于一般的重物吊装,具有3 个自由度数.连接部件主要是有大臂8、小臂9 以及底座1 等组成的.大臂是机械臂的主运动套臂伸缩机构,用于调节机械手臂的作业位置点,同时配备有一台磨机衬板输送车,台车以大臂作为运行轨道,大臂具有1 个自由度.小臂是机械手臂的主作业机构,可实现正反360 度回转、伸缩、变幅等动作,可实现人员跟随操控,也可实现远程无线遥控作业,具有3 个自由度[2].
1.2 工作原理
如图2 所示,为重载机械臂的运动关节图,机械臂具有7 个自由度,其中底座是个旋转关节,能够绕底座支撑进行360 度旋转运动,在大臂和底座之间是由变幅油缸实现两结构之间的俯仰运动的,在大臂和小臂之间内置有直线电机,为两臂运动提供驱动力.在机械臂的末端,抓手能够进行平摆,滚摆以及俯仰运动,是由液压马达完成驱动使得机械臂能够在较大空间内进行运动,完成机械臂衬板换装工作[3].

图2 重载机械臂运动关节图Fig.2 Motion joint of heavy load manipulator
1.3 三维建模
在SolidWorks 分别完成各个关节零部件的创建,最后在软件中完成装配,得到机械臂的实体模型,在装配过程中,所有杆视为刚性结构,如图3 所示[4].

图3 重载机械臂实体图Fig.3 Solid drawing of heavy load mechanical arm
2 运动学模型的建立
经上述分析,液压重载机械臂是一个具有7 个运动关节的开链结构,能够在运动空间内完成大范围的位姿变化,如图4 所示.
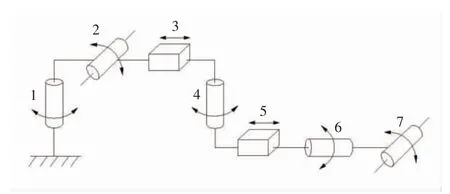
图4 重载机械臂运动关节结构图Fig.4 Structure diagram of motion joint of heavy load manipulator

图5 重载机械臂D-H 坐标系Fig.5 D-H coordinate system of heavy duty manipulator
根据关节原理图,运用D-H 法,对重载机械臂建立参考坐标系,如图5 所示,在参考坐标系上能够得到各个关节的参数[5].
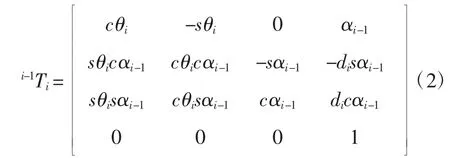
采用i-1Ti来表示机械臂的第i旋转关节的坐标系和连杆(i-1)坐标系两者相对应的位置及姿态,即:

可得式为:
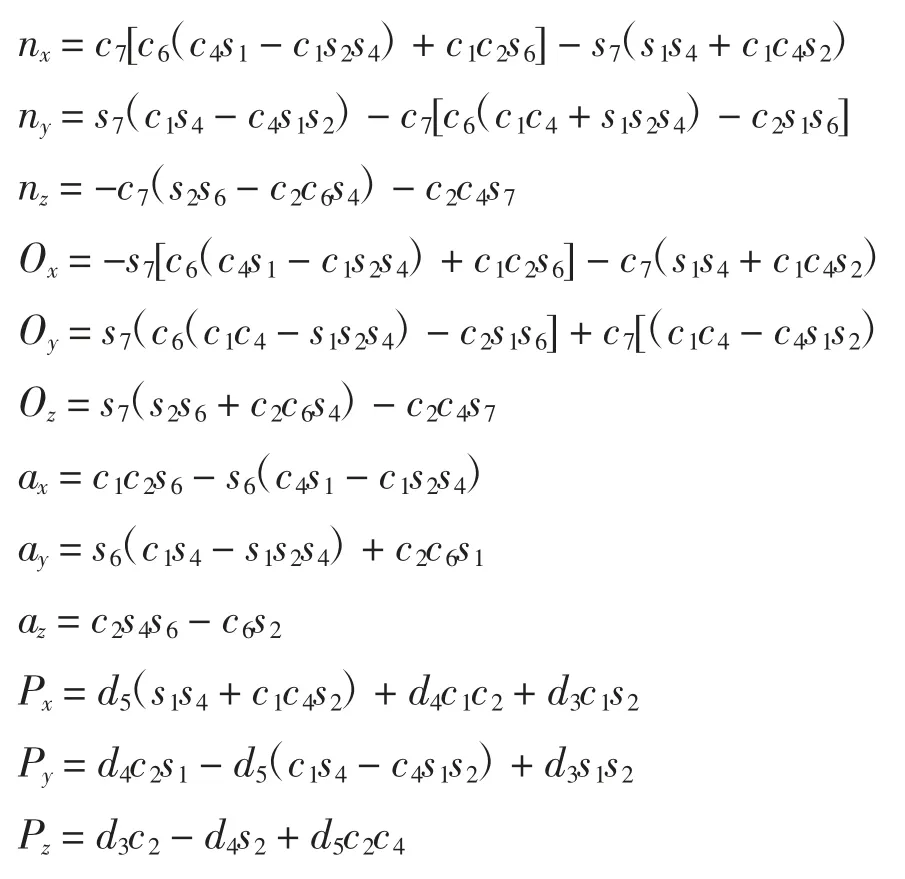
将连杆参数依次带入式中,就可以得到机械臂的其次变换矩阵:
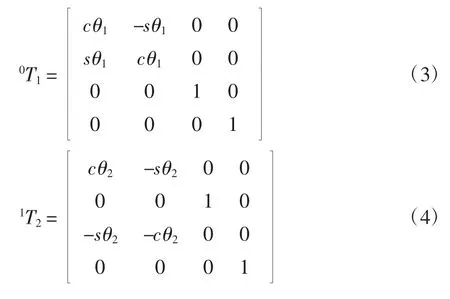

联立以上7 式,得:

这样就可以得到机械臂的7 个关节变量,对上式求解可得:
3 工作空间分析
3.1 轨迹分析
在MATLAB 中设定好机械臂末端位置的初始位置A 和需要所运动到的目标位置B,在A 点和B点之间设置多个中间点.由系统自带的轨迹规划而自动插补好中间的位移过程[6].在软件中按照我们预先设定好的轨迹路线编写好程序模拟仿真过程,设定工作时长为40 步,仿真结束可以得到机械臂在空间中的运动轨迹图以及机械臂7 个关节的运动参数随时间变化曲线图.分析图像可以得到机械臂成功的从起始点运动至终点且整个运动过程平缓无冲[7].

图6 重载机械臂的运动空间轨迹图Fig.6 Motion space trace of heavy load manipulator
各关节运动参数随时间变化曲线如图7 所示,在机械臂运动过程中,由上至下分别为关节4、关节1、关节3、关节6、关节5、关节2、关节7,7 条曲线都相对平缓无冲击,并未出现突然增加或减少的突变现象,证明了机械臂结构的正确性以及运动学方程建立的正确性.
3.2 工作空间求解
机器人学中,工作空间就是机械臂末端执行机构在运动过程中所走的区域值,求解机械臂的工作空间常用的方法就是蒙特卡罗法,蒙特卡洛法实际上是一种数值分析方法,它应用在机械臂求解中的主要方法就是的分析机械臂各关节在运动过程中所能到达的空间区域[8],在所能到达的区域内进行取值,所有值的集合就能大致描绘出工作空间,记为Q,可以用向量来表达:

图7 各关节参数变化曲线图Fig.7 Change curve of joint parameters
在MATLAB 中,建立运动学模型可以求出运动学正解,得到末端执行器的空间位置向量;利用随机函数rand(j)可以产生N个随机值,得到随机步长表示i关节变量的最大最小取值范围),最后可以确定θi:
θi称为伪随机值,将生成的N个伪随机值代入到正运动学求解得到的位置向量中去,N的取值范围越大,得到的结果越多,机械臂末端执行机构的工作空间描绘越精确[9].
这里取N=50 000,在MATLAB 中编好程序,仿真时间40 秒左右就能得到7 自由度重载机械臂的工作空间云图,见图8.
从图8 可以得出用蒙特卡洛法可以最大程度的得到重载机械臂末端执行机构的活动空间,范围是沿X(-1 200,1 200),Y(-800,1 000),Z(-800,1 200)三个坐标方向围成的一个椭球体区域,能够推出末端机构所能运动的极限位置.在多次实验中可以得出随着N 赋值越大,得到的形状会更加规则,得出的实际工作空间会更加精确.
4 结 论
以设计的7 自由度液压重载机械臂为研究对象,设计出了它的结构简图以及分析了机械臂的工作原理,借助三维软件SolidWorks 创建了它的三维实体图. 建立重载机械臂的运动学理论模型,在MATLAB 中编写程序进行仿真分析,得出的各关节参数曲线对平缓无冲击,验证了所建立的重载机械臂三维模型的可靠性以及运动学理论的正确性.同时在MATLAB 中使用蒙特卡洛法分析了机械臂末端执行机构的工作空间,为机械臂后续的轨迹规划等提供理论基础.
