基于电流力矩混合传感的机械臂关节柔性控制装置及方法
2020-07-17
申请人
北京精密机电控制设备研究所,中国运载火箭技术研究院
发明人
杜宝森 刘书选 刘嘉宇 杨涛 等
专利号
201710719964.5
公告日
2019-11-29
技术领域
本发明属于机械臂柔顺力控制领域,涉及一种机械臂关节作用力传感和控制装置。
权利要求书
(1)一种基于电流力矩混合传感的机械臂关节柔性控制装置,其特征在于:包括关节驱动控制器、关节电流传感器模块、关节力矩传感器模块;关节电流传感器模块采集关节电机三相电流,当三相电流发生变化时,关节力矩传感器模块开始采集力矩数据,并送至关节驱动控制器;关节驱动控制器根据力矩数据判断关节是否受到外力作用;当判断受到外力作用时,关节电流传感器模块采集关节电机驱动电路的功率电流,关节驱动控制器根据采集到的关节电机驱动电路的功率电流计算获得机械臂关节的运动角度,并控制机械臂关节运动。
(2)根据权利要求(1)所述的一种基于电流力矩混合传感的机械臂关节柔性控制装置,其特征在于:所述关节力矩传感器模块包括内环、外环、N个弹性梁和N组力矩传感器;弹性梁连接内环和外环,力矩传感器放置于弹性梁上,每个弹性梁对应一组力矩传感器;内环与本机械臂关节的关节电机输出轴固定,外环连接下一个机械臂关节;力矩传感器的导线通过位于内环中心的中孔穿过结构件和关节输出轴接入关节驱动控制器;N为不小于3的正整数。
发明内容
本发明解决的技术问题是:克服现有技术的不足,提出一种基于电流力矩混合传感的机械臂关节柔性控制装置,解决了机械臂在人机交互操作过程中受到外加作用力情况下机械臂关节主动力控的问题。
本发明与现有技术相比的优点是:
(1)采用电流和力矩双参数混合传感的方式进行机械臂关节力控,电流参数提供受力触发和控制参数计算,力矩参数实现受力有效性的判定。
(2)采用三冗余力矩传感器进行关节受力的有效性判断,有效避免了关节轴受到非圆周力的干扰。
(3)电流传感器采用三相电流和驱动电路功率电流等两项电流监测实现力控。在保证灵敏度的同时,降低了电流噪声的干扰。
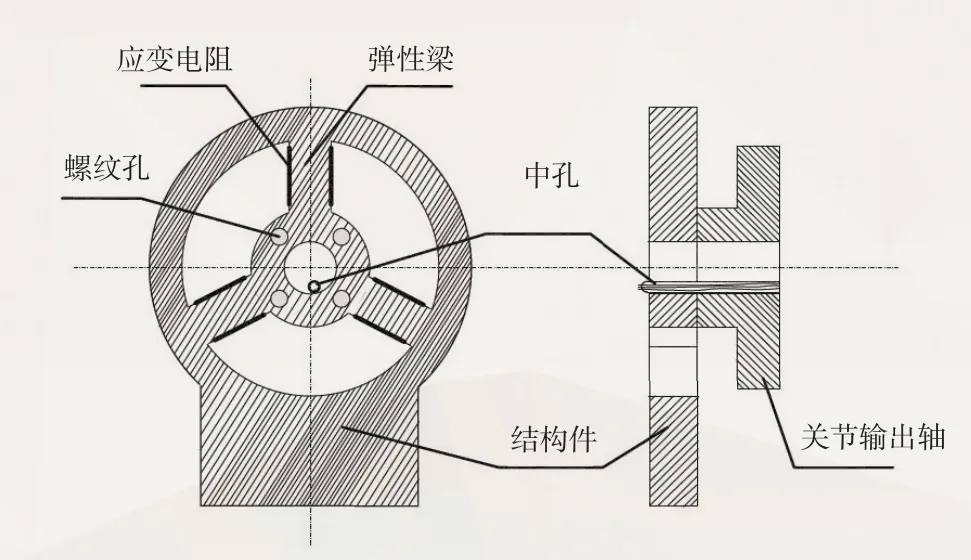
▲三冗余力矩传感器原理图
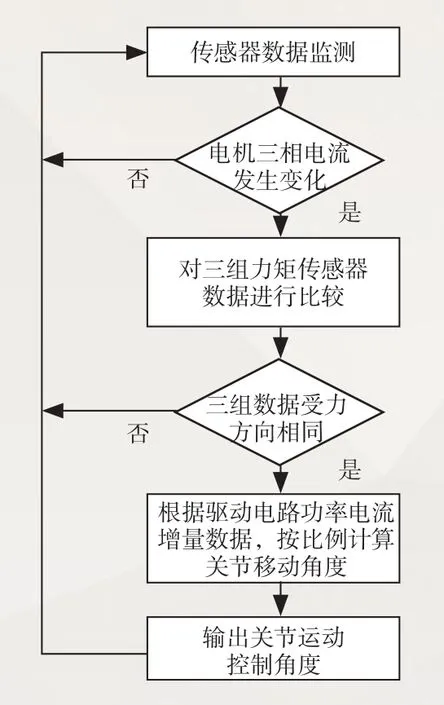
▲关节力控流程
联系方式
杜宝森010-68382935