外骨骼机器人技术专利分析研究
2020-07-17北京精密机电控制设备研究所原誉桐郑继贵皮利萍张艾莎
北京精密机电控制设备研究所 原誉桐 郑继贵 皮利萍 张艾莎
一、引 言
外骨骼机器人是一种穿戴在操作者身体外部,融入先进控制、信息耦合、移动计算、通信等技术的人机电设备,可为穿戴者提供额外的动力或能力,增强人体机能,其在操作者的控制下可完成特定的功能和任务,实现人体力量的增强和感觉器官的延伸。外骨骼机器人技术最早应用在工业领域,用于为操作者提供支撑和辅助,随着控制技术的发展和人机耦合技术的进步,其逐步应用于消防救援和核探测领域。近年来,外骨骼机器人技术也在陆军得到了初步应用,用于单兵负载携行。基于外骨骼机器人技术在军民领域具有很好的应用前景,开展专利技术分析具有重要的意义。
二、外骨骼机器人关键技术图谱与专利检索分析
(一)关键技术图谱
研究人员研究了外骨骼机器人产品的组成和专业构成,从专业和功能实现的维度进行综合分析,对其组成和技术细节进行总结,得到了外骨骼机器人技术图谱,如图1所示。外骨骼机器人共涉及机械结构、运动感知、控制、驱动、能源管理、测试/评价等6个方面的关键技术。
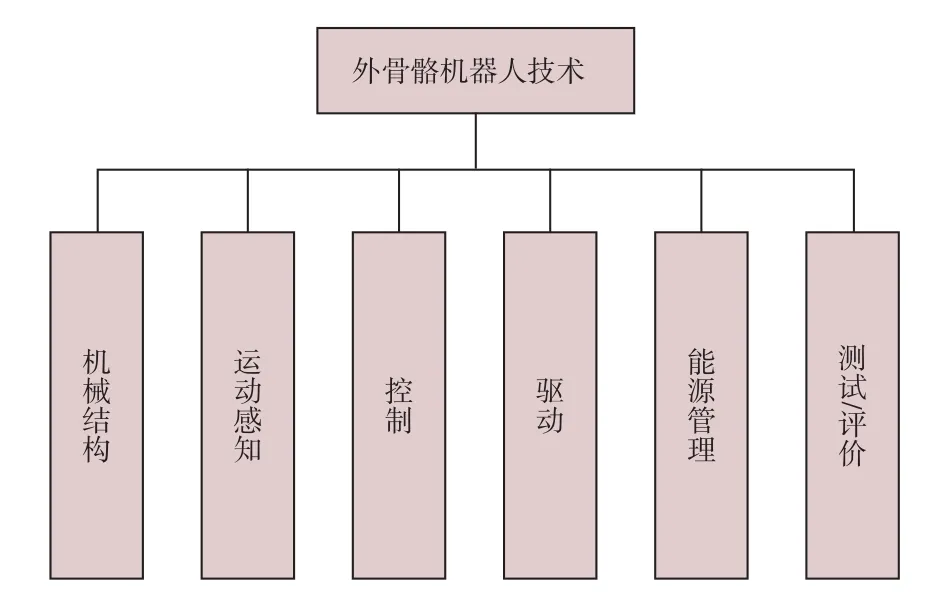
图1 外骨骼机器人技术图谱
(二)专利技术分析
1.专利申请趋势分析
2003年之前,外骨骼机器人技术整体处于技术萌芽和发展的初级阶段,专利申请量较少。2003—2013年,全球外骨骼机器人技术专利申请量呈现快速增长趋势,年专利申请量超过100件。2013年以后,外骨骼机器人技术开始逐步从实验室走向应用并进入市场,在各国外骨骼机器人技术快速发展的驱动下,全球专利申请呈现出指数型高速增长态势,并在2018年达到申请高峰,当年共申请了434件专利。
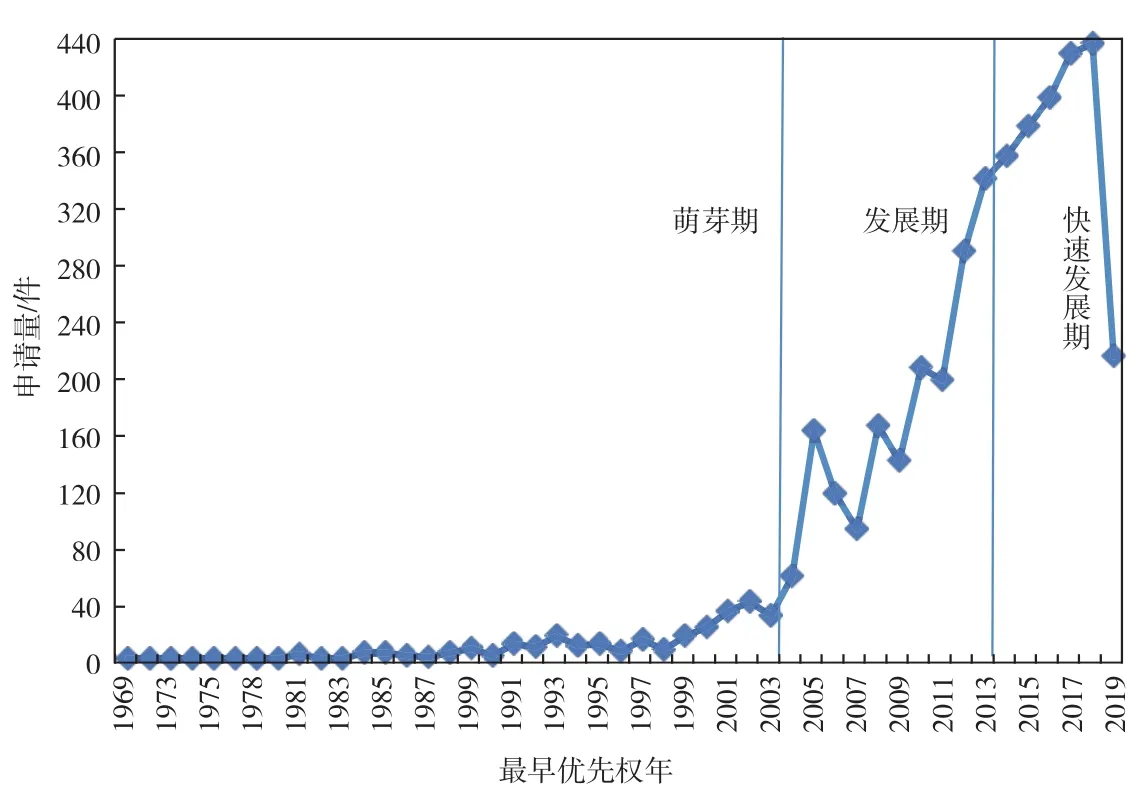
图2 外骨骼机器人技术领域的专利申请趋势图
2.专利申请人分析
图3为20世纪60年代以来在外骨骼机器人领域全球主要专利申请人的排名情况,可以看出,排名前15位的申请人中,日本、美国和中国的申请人所占比例较高。其中,日本有4家单位入围,分别为日本本田电机公司、日本丰田公司、日本筑波大学(TSUKUBA大学)和日本EQUOS公司,这4家单位的研究重点均为医用外骨骼机器人技术。美国有3家单位入围,分别为美国Ekso Bionics公司、美国加州大学和美国洛马公司,这3家单位都参与过军用外骨骼机器人的研发工作。我国有5家单位入围,分别为浙江大学、上海交通大学、电子科技大学、哈尔滨工业大学和上海理工大学,全部为科研院校,研究重点为军用外骨骼和工业外骨骼技术。韩国有2家单位入围,分别为韩国三星公司和韩国现代公司。以色列有1家单位入围,为ARGO医学技术公司。
专利申请量排名第一位的日本本田公司共申请了330件专利,其推出的步行辅助康复装置主要用于医学领域。美国Ekso Bionics公司和美国加州大学从研发军用外骨骼机器人开始,逐渐进军医学领域。美国洛马公司的专利申请主要面向军方,多集中在增进士兵的力量和耐力方面。浙江大学、上海交通大学、电子科技大学、哈尔滨工业大学和上海理工大学的专利申请主要涉及助老助残、医疗康复训练等医学领域,极少部分涉及负重助力等军事领域。以色列的ARGO医学技术公司排在第七位,该公司后来改名为Rewalk公司,其研发的外骨骼机器人主要用于医学领域,在2012年创造了第一个穿戴外骨骼机器人的下肢瘫痪病人完成伦敦马拉松比赛的壮举。
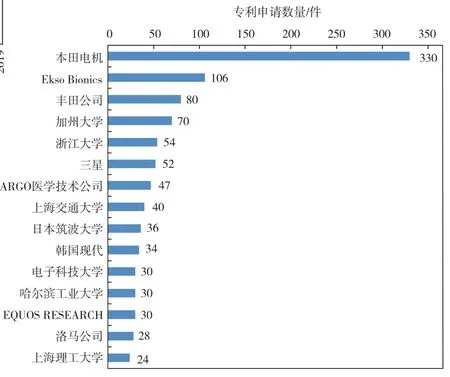
图3 20世纪60年代以来全球主要专利申请人的排名情况
图4是近5年来在外骨骼机器人领域全球主要专利申请人的排名情况,通过与图3对比可以看出,近5年主要申请人的排名发生了较大变化,韩国的2家公司排名靠前,其中韩国三星公司的专利申请量排名第一,韩国现代公司排名第三。2016年,韩国现代公司旗下现代罗特姆公司在第二届韩国防务展上展出了其研制的HWEX-UP(现代工人外骨骼无动力)和模块化髋部外骨骼系统,该外骨骼系统用于工业领域,可减轻老龄工人的身体负担。排名前15位的申请人中,中国有9家,而日本仅有EQOUS公司入围。近5年来,中国和韩国在该领域的专利申请量要高于日本。

图4 近5年来在外骨骼机器人领域全球主要专利申请人的排名情况
三、专利申请区域分析
(一)专利产出国分析
图5是20世纪60年代以来外骨骼机器人领域主要专利产出国的分布情况,可以看出,外骨骼机器人技术专利产出国主要集中在中国、日本、美国和韩国。其中,我国的专利申请量最多,达到1669件;日本排名第二,共申请了631件专利;美国排名第三,共申请了582件专利;韩国排名第四,共申请了282件专利。
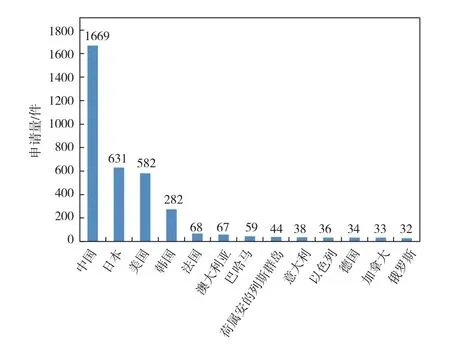
图5 20世纪60年代以来外骨骼机器人领域主要专利产出国的分布
(二)主要申请国家的专利发展趋势
图6为20世纪60年代以来外骨骼机器人技术专利申请量排名前4位国家的专利申请趋势对比情况。
美国的专利申请始于20世纪60年代,是研究外骨骼机器人技术最早的国家。一直到2004年,美国每年申请的外骨骼机器人技术专利数量都不超过10件;2005年,美国的专利申请量首次达到小高峰,共申请了27件专利,这是因为美国加州大学伯克利分校在该年申请了多件涉及半-供电下肢体外骨骼机器人技术的专利,并在美国、加拿大、中国、澳大利亚、欧洲等国家和地区进行了专利布局;2008年,美国专利申请量达到第二次小高峰,共申请了41件专利,这主要是因为在美国国防部高级研究计划局(DARPA)的“人类行动强化外骨骼项目(EHPA)”资助下,加州大学伯克利分校、美国伯克利仿生技术公司、美国雷神公司和美国Ekso Bionics公司等创新主体取得了技术突破,并推动其商业化应用;之后外骨骼机器人技术在美国一直处于稳步发展状态。
1.4 研究方法 对照组患儿使用匹多莫德口服液(苏州长征-欣凯制药有限公司,国药准字H20030464,0.4 g/次,2次/d),观察组患儿联合使用匹多莫德(苏州长征-欣凯制药有限公司,国药准字H20030464,0.4 g/次,2次/d)和葛根素(青岛金峰制药有限公司,国药准字H20010174,0.4 g/次,1次/d)治疗,治疗时间均为4周。
日本在外骨骼机器人技术研究方面的起步比美国晚,20世纪90年代才开始研究,但其发展速度较快,2000年以后日本的专利申请量高于其他国家,并于2005年达到申请高峰,达107件,这主要是由于日本本田公司、日本筑波大学等创新主体加大了对外骨骼机器人技术的研发投入,取得了较多研究成果,并在各个国家进行了专利布局。随着日本外骨骼机器人技术的商用化,近5年来,日本的专利申请数量呈现下降趋势,在2011年后其专利申请量落后于我国,说明日本的外骨骼机器人技术逐渐趋于成熟。
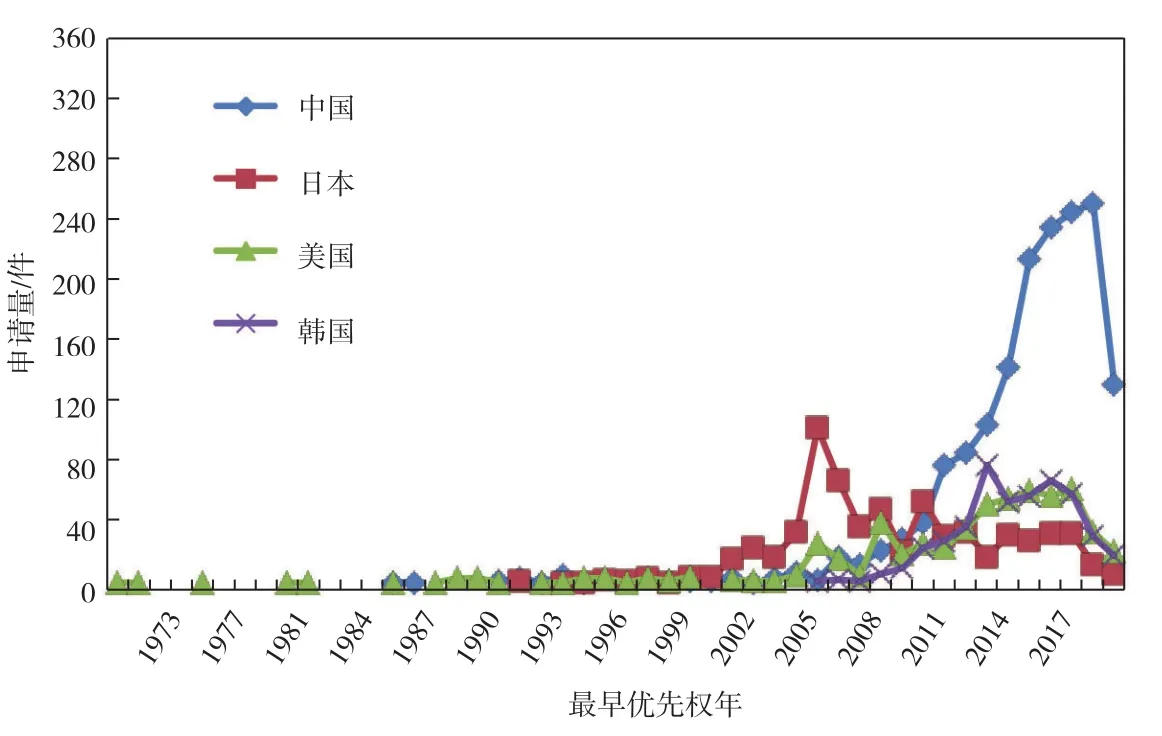
图6 20世纪60年代以来主要申请国家的专利申请趋势对比
韩国的外骨骼机器人技术专利申请始于2005年,2010年后,其专利申请量呈现快速增长趋势,并赶超美国、日本,这主要是由于韩国现代公司、韩国三星公司等在近年来加大了对医用外骨骼机器人技术的研发投入。
近年来,我国在外骨骼机器人领域的专利申请量排名第一,但在2010年前,相关专利申请量并不多,一直落后于美国和日本,从2011年开始,专利申请呈现迅猛增长态势,领跑其他国家,尤其在2015年,我国专利申请数量超过240件,这主要是因为受外骨骼机器人技术发展的驱动,各科研院所、高校等投入了大量的人力物力开展相关研究,加之国家近年来对知识产权保护的重视程度和政策扶持力度逐渐加大,使得研究人员倾向于将研究成果以申请专利的形式进行保护。
四、专利申请技术构成分析
(一)按照基本构成分类
外骨骼机器人技术按基本构成可分为:机械结构、控制、运动感知、驱动、能源管理和测试/评价技术6个部分。按照基本构成进行分类,20世纪60年代以来世界各国在外骨骼机器人领域的专利申请分布图及申请趋势如图7和图8所示,可以看出,机械结构和控制技术是外骨骼机器人技术的研发重点。机械结构方面的专利申请数量最多,占总申请量的49%;控制技术是外骨骼机器人的核心技术,其专利申请量占比排名第二,占总申请量的35%;运动感知、驱动、能源管理和测试/评价技术的专利申请量相对较少,未来仍然需要对这些技术进行持续攻关。
从图8可以看出,机械结构方面的专利申请趋势与图2所示的专利申请趋势大致相同,可以预见该技术未来仍将保持快速发展的趋势。运动感知技术与驱动技术的专利申请趋势与图2大致相同,近几年的专利申请量有所上升,但总量与机械结构和控制技术相比要少得多。能源管理技术和测试/评价技术方面的专利申请量则更少,在最近几年偶尔出现,可见其技术关注度较低。
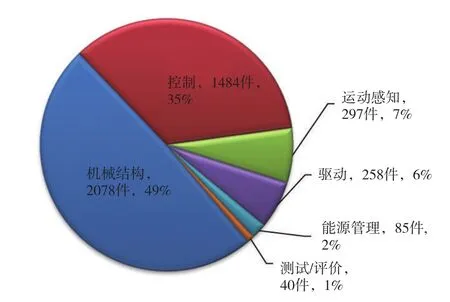
图7 20世纪60年代以来按基本构成分类的专利申请分布图
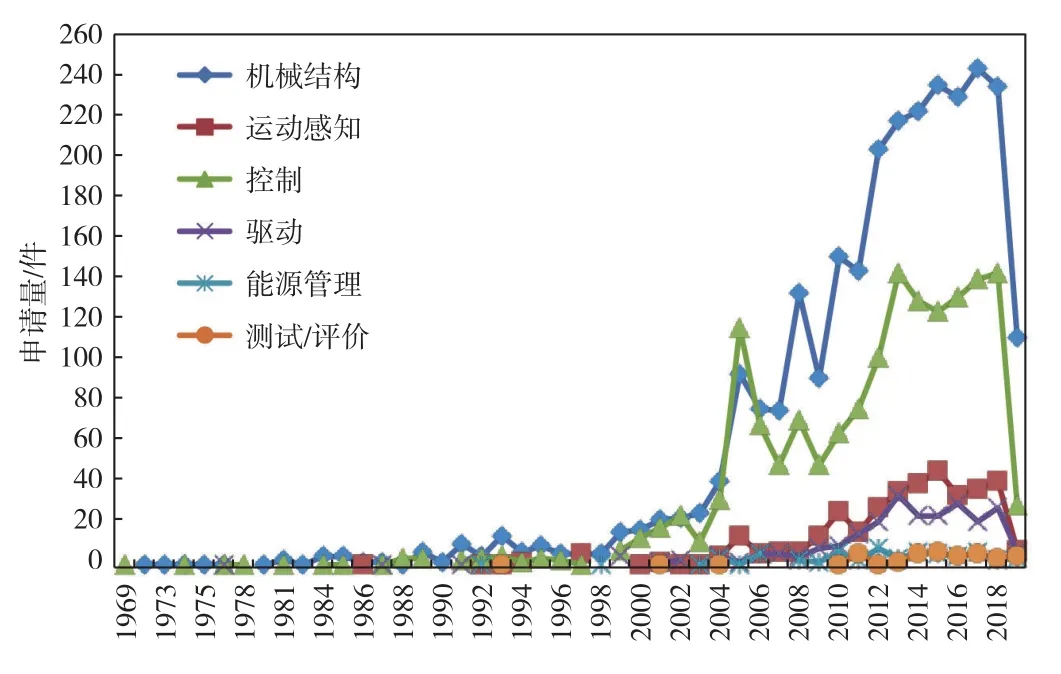
图8 20世纪60年代以来按基本构成分类的专利申请趋势
按照基本构成分类,20世纪60年代以来全球专利申请量排名前4位的主要申请国家在各技术领域的专利申请量和占比如图9所示。可以看出,我国在机械结构技术方面申请的专利数量最多,有977件,占我国申请总量的59%;在控制技术方面申请的专利有467件,占比为28%,低于全球总专利申请量中控制技术的占比(参见图7,占比为35%)。从系统技术研发角度来说,我国要加大对外骨骼机器人中控制技术的研发力度。
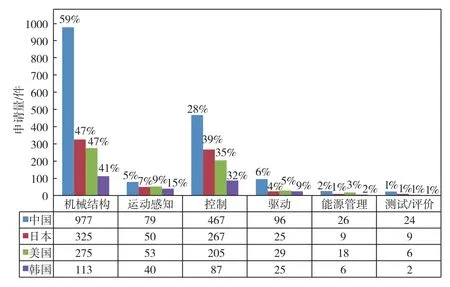
图9 20世纪60年代以来按基本构成分类的各技术专利分布情况
(二)按用途及辅助身体部位分类
按照用途及辅助身体部位进行分类,20世纪60年代以来世界各国在外骨骼机器人领域申请的专利分布图如图10所示,可以看出,助力下肢技术和康复下肢技术是外骨骼机器人技术的研发重点,2种技术的专利申请量分别是1400件和1357件,占比分别是33%和32%,这说明无论是在康复医疗领域还是军事增强力量领域,外骨骼机器人技术研究主要集中在下肢应用领域。康复上肢、助力上肢和助残/助老下肢技术的专利申请量分别是636件、297件和339件,占比分别为15%、7%和8%;助残/助老上肢、轮椅技术的专利申请量较少,分别为85件、42件,占比为2%和1%;能源管理技术的专利申请量占比仅为2%,说明对该技术的研究相对较少。

图10 20世纪60 年代以来按用途及辅助身体部位分类的专利申请情况
(三)按组成部分进一步细分
按照组成部分进一步细分,20世纪60年代以来世界各国在外骨骼机器人领域申请的专利分布图如图11所示,可以看出,机械结构技术中整体结构方面的专利申请量最多,达到277件;其次是运动感知技术中的运动学感知(包括应用位移、加速度计、倾角计、惯性传感器等)和控制技术中的力控制(包括应用应变计、力矩、压力等)方面,专利申请量分别为89件和90件。
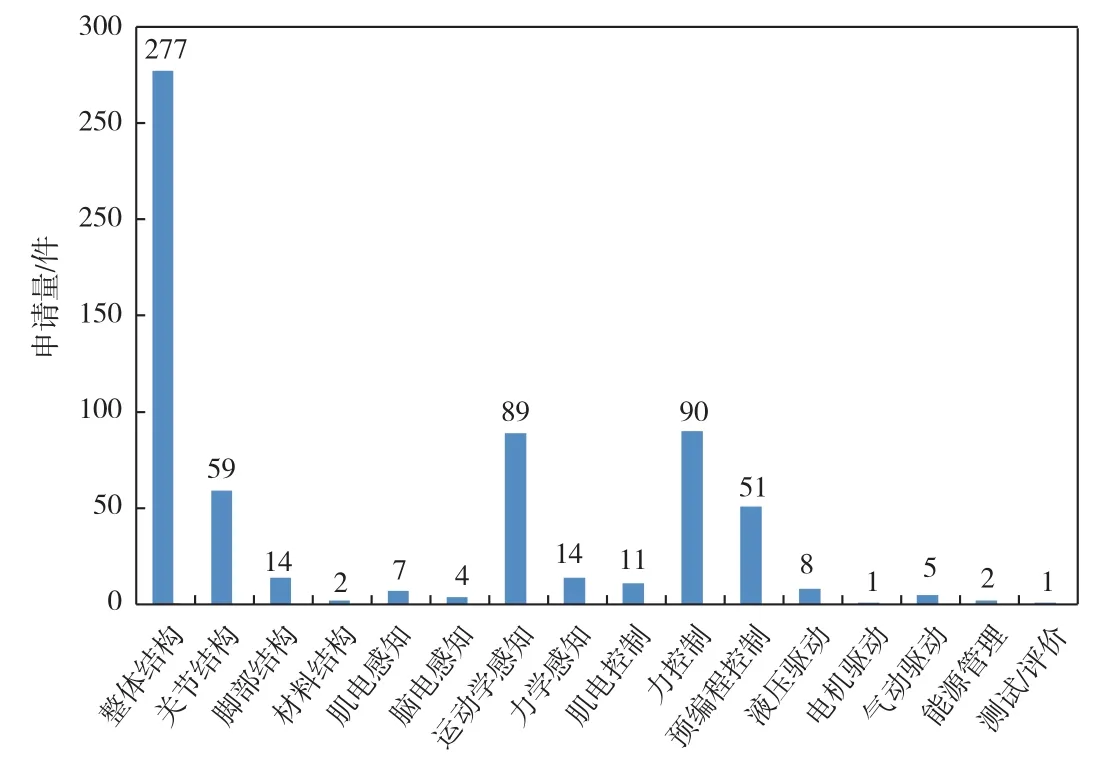
图11 20世纪60年代以来按组成部分进一步细分的专利分布情况
从以上分析可以看出,未来人体增强外骨骼技术仍将呈现快速发展趋势,并逐步从实验室走向应用并进入市场。机械结构和控制技术是外骨骼机器人技术的研究重点,市场需求主要集中在下肢应用的领域,我国的创新主体主要是高校,美国和日本的创新主体已通过产学研结合实现商业化运营,军事和医疗应用同步发展。
五、发展建议
(一)技术发展建议
1.加强对多模式控制技术的研究
随着外骨骼系统的智能化、人机耦合、模块化和微型化程度不断提高,控制技术成为外骨骼的核心技术,必须加强对外骨骼控制技术的研发投入和技术攻关力度,具体包括主动、被动和/或主被动混合的多康复训练模式控制技术。
2.加强对运动感知和驱动技术的研究
经研究分析发现,运动感知和驱动技术方面申请的专利较少,而意图的预测信息、运动姿态的感知信息、生理状态的感知信息可为控制系统和执行机构提供控制依据,因此需要加强对相关信息的收集工作。在驱动技术方面,要求驱动机构效率高、体积小、质量轻、功耗低,同时还要满足精确随动控制的要求,因此,未来需要进一步加强对驱动机构的深度研究。
3.加强对测试/评价技术的研究
康复测试/评价的目的是帮助医师了解病人的康复水平,评价手段是采集和分析病人的各项信息,判断病人的生活独立情况。这些技术对制定康复计划和评判康复成效非常重要,可以提高训练的针对性、科学性和准确性。因此,未来应加强对测试/评价技术的研究。
4.加强对上肢外骨骼机器人技术的研究
人体上肢从事各种复杂、精细的活动,其运动功能直接影响人们的日常生活能力,随着社会人口老龄化速度的加快,上肢外骨骼的市场需求在逐步增大。而现有的外骨骼机器人技术研究主要集中在下肢外骨骼方面,因此加强对上肢外骨骼机器人的技术研究是非常必要的。
(二)专利布局建议
外骨骼机器人行业整体呈现快速发展趋势,国内外市场竞争激烈,竞争对手针对其外骨骼产品已经进行了专利布局,我国急需围绕重点改进方向采取防御为主、进攻为辅的专利布局策略。布局过程中要综合考虑公司的发展战略、已掌握的核心技术、行业现状、竞争对手情况等因素。表1给出了相关专利布局策略。

表1 专利布局策略
六、总 结
开展外骨骼机器人技术专利分析,能够更好地了解国内外竞争对手的研究动向和专利布局现状,更好地实现对本单位技术和产品的保护,更好地为新技术开发提供指引和借鉴,同时为该产品拓展国内外市场提供知识产权保护方面的支撑。