一种新型手持式激光测距仪示值误差的检定方法
2020-07-16河北省计量监督检测研究院
/ 河北省计量监督检测研究院
0 引言
手持式激光测距仪是一种以激光为载波,以目标表面漫反射测量为特点,通过脉冲法、相位法等方法测定空间短程距离的便携式计量器具[1]。广泛应用于测绘及建筑施工中[2],为了确保测绘及建筑施工测量中的质量,必须依法实施对手持式激光测距仪的计量检定。传统方法中[3-6],手持式激光测距仪在0~50 m范围内的检定以标准钢卷尺为主标准器,该方法需要多次的安装、移动标准反射板,数据处理繁琐,自动化程度偏低、机构复杂,且量值溯源准确度不高。为此,本文基于室内长度测量系统提出了一种新型手持式激光测距仪示值误差的检定方法。
1 测量原理
室内长度测量系统由激光干涉仪、50 m基线导轨、气浮平台、微调装置、基准台面、标准反射板、微动台架、控制系统和配套软件组成。激光干涉仪为主标准器,反射镜安置于气浮平台上,其示值为标准值。为了规避激光干涉仪反射镜中激光对手持式激光测距仪电子接收电路的影响,将手持式激光测距仪和标准反射板安置在气浮平台上且位于激光干涉仪反射镜相反的一侧。同时基于阿贝原则[7]调整手持式激光测距仪、标准反射板、激光干涉仪反射镜的空间姿态。进而通过控制系统移动气浮平台,手持式激光测距仪在标准反射板位移处采集数据,为被检仪器示值,从而完成示值误差的检定。测量原理如图1所示。
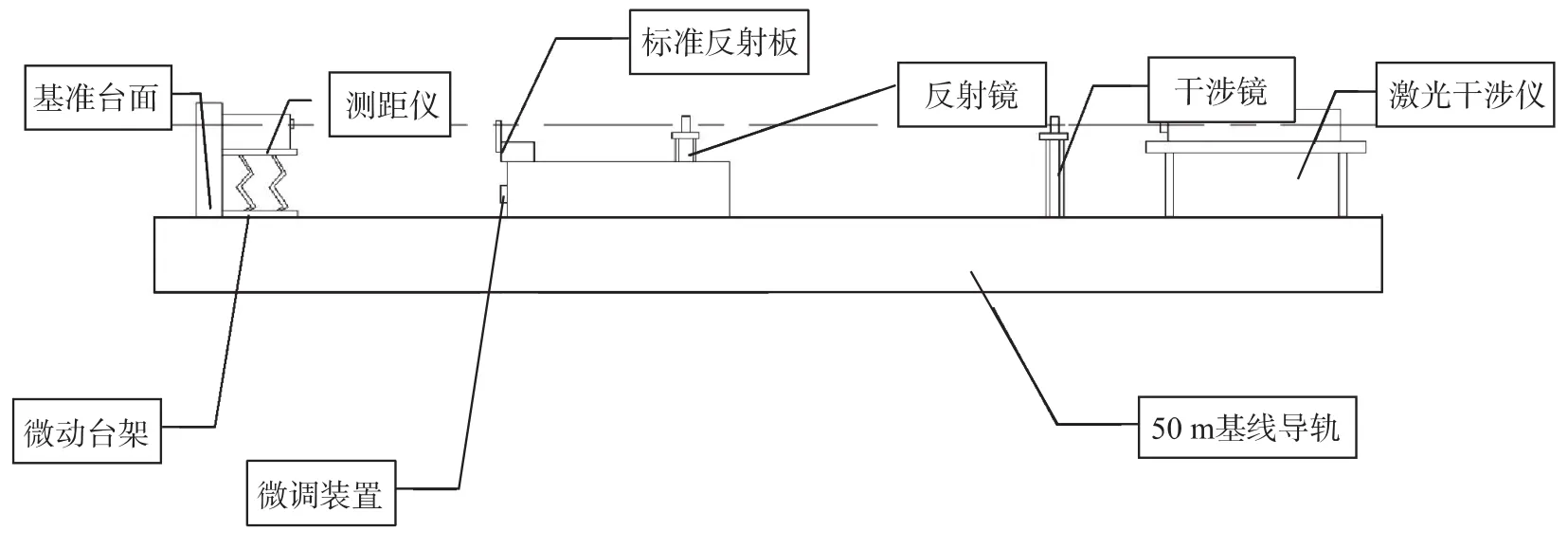
图1 测量原理图
2 测量过程
首先将激光干涉仪、干涉镜、反射镜、基准台面和标准反射板安置完毕,并调整光路。然后通过控制系统移动气浮平台,并通过气浮平台上的微调装置使标准反射板面和基准台面接触,同时激光干涉仪示值清零,以此完成基准台面的对零,以便保证测距仪和干涉仪的零位一致。然后移开气浮平台,将置于微动台架上的激光测距仪的后基准面紧贴基准台面并置于50 m基线导轨上。最后通过微动台架调整手持式激光测距仪的空间姿态并移动气浮平台完成被检仪器示值的数据采集。现场检定如图2所示。
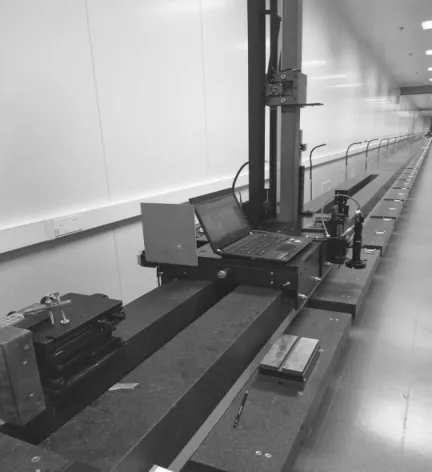
图2 现场检定图
3 示值误差测量结果的不确定度评定
3.1 测量模型
由测量原理可知手持式激光测距仪示值误差的测量模型为

式中:Δd—— 示值误差;
D—— 手持式激光测距仪的测量值;
d—— 计量标准长度值
3.2 方差和灵敏系数
根据方差合成定律,输出量的估计方差为各输入量的估计方差所合成。式(1)是一线性测量模型,式(1)中各输入量按相互独立互不相关处理,在方差合成中不考虑高阶项及相关的影响。依方程:

将函数式(1)对各输入变量求偏导,可得输出量估计方差:

3.3 影响手持式激光测距仪示值误差各不确定度分量
各不确定度分量见表1。
3.4 标准不确定度的评定
以分辨力为 0.1 mm 的 leica DISTO D110 型号的手持式激光测距仪为被检对象。
3.4.1 测量重复性引入的标准不确定度u1.1
在重复性测量条件下,对分辨力为0.1 mm的leica DISTO D110 型号的手持式激光测距仪在 10 m点连续进行了10次测量,测量值为10 000.4 mm,10 000.4 mm,10 000.4 mm,10 000.5 mm,10 000.5 mm,10 000.5 mm,10 000.5 mm,10 000.4 mm,10 000.4 mm,10 000.5 mm。测量平均值为 10 000.45 mm,根据贝塞尔公式可得单次标准偏差s= 5.27×10-2mm。检定手持式激光测距仪的示值误差时,每一个受检点测量5次,取平均值作为测量值,因此
3.4.2 仪器分辨力引入的标准不确定度u1.2
被检手持式激光测距仪的分辨力为0.1 mm,区间半宽度为0.05 mm,按均匀分布,置信因子k= ,所以手持式激光测距仪分辨力引入的标准不确定度。
3.4.3 室内长度测量系统引入的标准不确定度u1.3
由室内长度测量系统的校准证书可知,其扩展不确定度为

按正态分布,则u1.3= 0.07 μm + 5×10-8L。该项不确定度分量可忽略不计。
3.4.4 测量轴线与激光干涉仪轴线不重合导致的阿贝误差引入的标准不确定度u1.4
根据室内长度测量系统的校准证书可得,基线导轨移动的角偏摆θ≤50'',因此ω的范围为,估计该量为均匀分布,则此夹角引入的不确定度[8]ω为

检定时,激光干涉仪轴线到手持式激光测距仪的测量轴线的垂直距离h= 100 mm,由此产生的测量阿贝误差引入的标准不确定度:

3.4.5 测量轴线与激光干涉仪轴线夹角导致的余弦误差引入的标准不确定度u1.5

表1 不确定分量一览表
手持式激光测距仪激光束轴线与激光干涉仪激光束轴线之间的夹角为θ,被检对象沿运动方向移动50 m,则测量距离与实际位移之差:

因此u1.5= 0 mm,则该项标准不确定度可忽略不计。
3.4.6 安置误差引入的标准不确定度u1.6
以室内测量系统为计量标准时,手持式激光测距仪与基准台面的最大安置误差为0.2 mm,按三角分布估计,置信因子取,则

3.4.7 标准反射板与基准台面的对零误差引入的标准不确定度u1.7
通过实验可得标准反射板与基准台面的最大对零误差为0.5 mm,按三角分布估计,置信因子取,则

3.5 合成标准不确定度和扩展不确定度
由于重复性引入的标准不确定度小于仪器分辨力引入的标准不确定度,故按后者进行标准不确定度的合成[9]。因此合成标准不确定度为

取包含因子k= 2,则扩展不确定度为

它是由标准不确定度uc1(Δd) = 0.23 mm 和包含因子k= 2 相乘得到。
0级手持式激光测距仪示值最大允许误差为±(1.5 mm + 5×10-5D)[10],则|MPE|,满足要求[8]。
4 结语
以室内长度测量系统为标准器的手持式激光测距仪示值误差的检定方法,具有自动化程度高、操作方便和量值溯源准确度等级高的优点,通过示值误差不确定度的评定验证了该方法的可行性。为手持式激光测距仪的检定提供了一种新的思路。