对绳端速度问题的研究和思考
2020-07-16鲁建全
鲁建全
(郑州外国语学校,河南 郑州 450001)
1 问题的提出
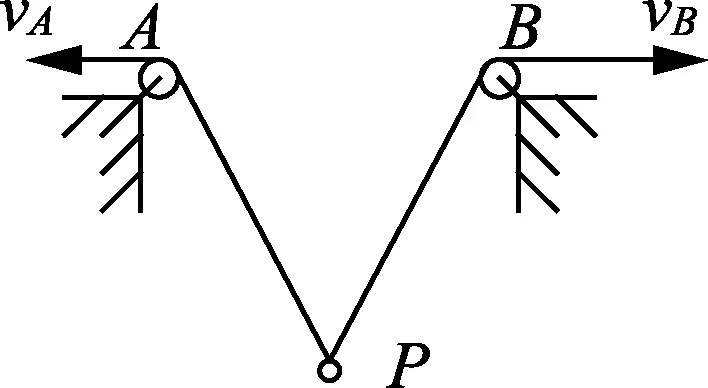
图1
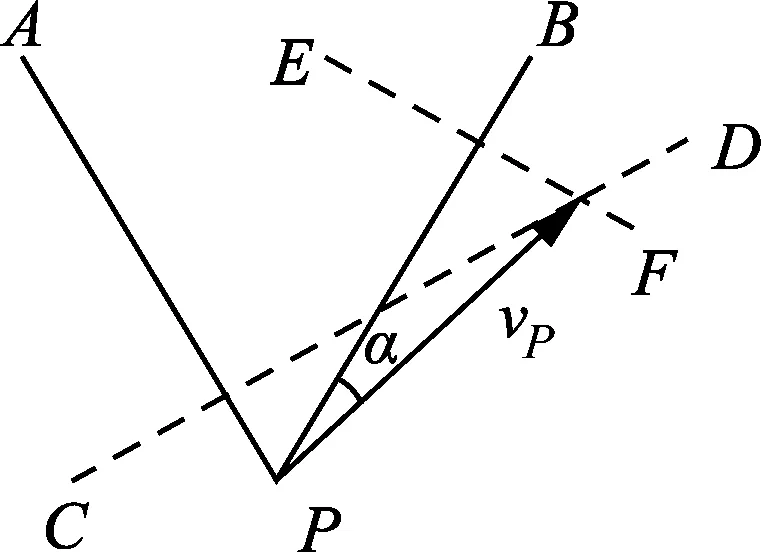
例1.如图1所示,两个滑轮位于同一高度(忽略大小),两根不可伸长的细绳绕过滑轮把可视为质点的小球P悬挂,通过拉滑轮两端的绳使小球运动起来.运动一段时间后某一时刻,A、B端拉绳的速度分别为1 m/s,2 m/s.连接P的两段绳与竖直方向夹角均为30°,两绳均处于拉直状态,此时小球P的速度
(A)v>2 m/s. (B)v=2 m/s.
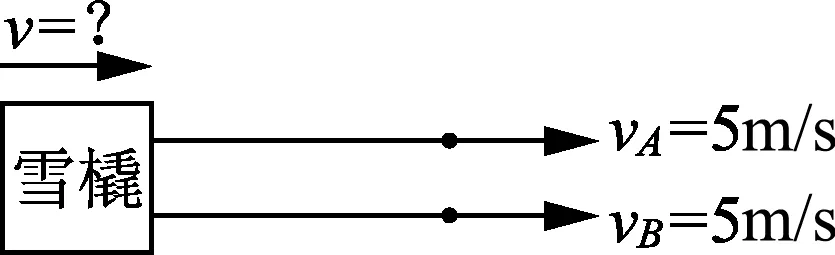
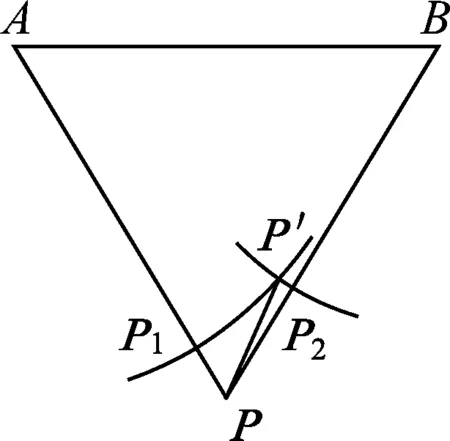
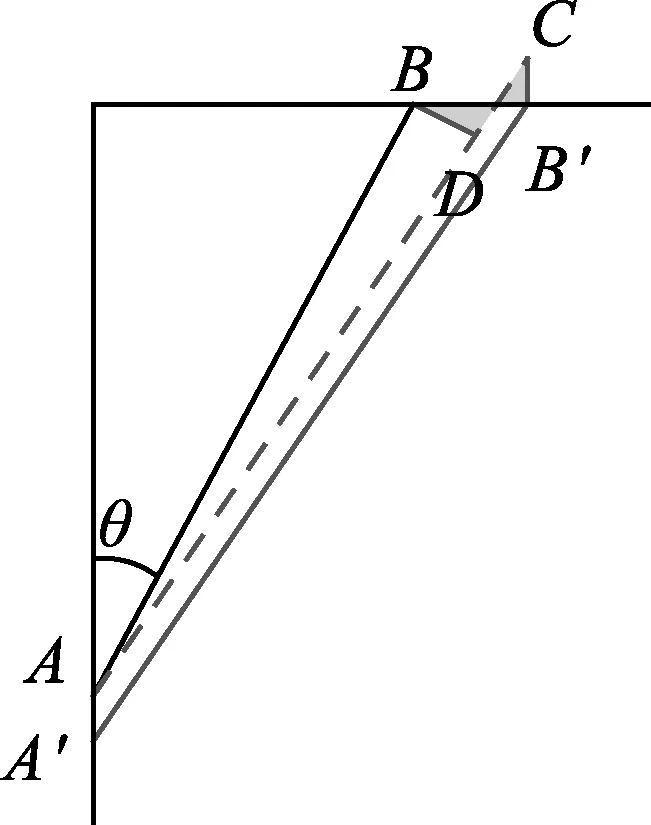
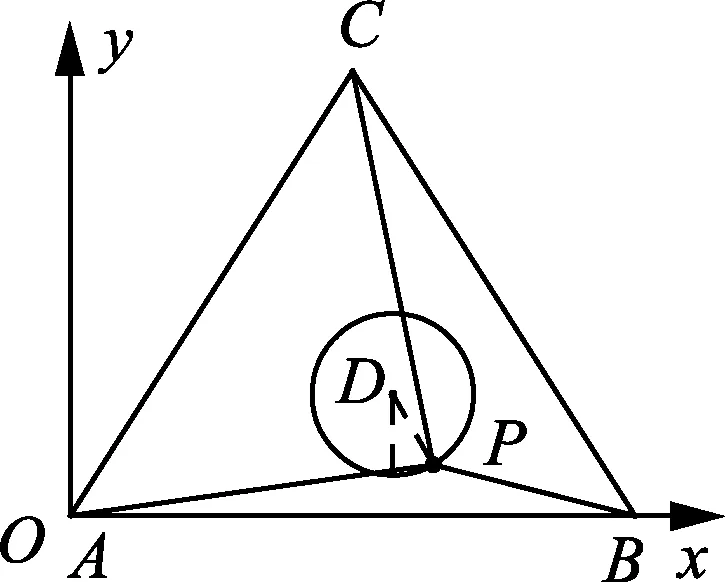
(C) 1 m/s 该题是笔者自编的一道高三练习题,旨在考察学生对运动的合成和分解掌握情况,尤其是对绳端速度问题的分析和应用.结果全班学生无一答对,这个结果令人深思. 图2 错解原因:小球P速度并不是两个沿绳方向的拉绳速度的合成. 图3 我们可以举一个简单的例子来说明.如图3所示,两只狗通过两根绳沿同一方向拉雪橇,两只狗的速度均为5 m/s,问雪橇的速度是多少? 我们会不假思索地说出雪橇的速度也是5 m/s,可见雪橇的速度并不是两个沿绳方向的拉绳速度的合成. 两只狗若拉绳的力均为50 N,雪橇受拉力的合力确实是100 N,怎么理解? 若绳端运动方向不沿绳方向,则沿绳方向分速度相等. 由于力和速度的变化相对应,和速度并无直接关系,所以两只狗的拉力与雪橇受总拉力的关系,并不适用于两只狗的速度与雪橇速度的关系,而适用于在同一段时间内,两只狗单独作用引起的速度变化与共同作用引起的速度变化的关系. 图4 什么情况下可以应用速度的合成呢?我们再举一个简单的例子.如图4所示,公交车向前的速度是5 m/s,人在公交车上向前走动的速度是3 m/s,问人对地的速度是多少. 这时人对地的速度才是车速和人在公交车上速度的合速度为8 m/s. 绳端速度问题该如何解决呢? 图5 对于一根长度不变的轻绳,拉紧状态下,如果绕过定滑轮,绳两端速度都分解为沿绳和垂直绳方向,由于绳长不变,绳两端沿绳方向的分速度相等.如图5所示,设P的速度大小为vP,方向与PB夹角α. 研究PB绳,绳端沿绳方向分速度相等,有vPcosα=vB=2 m/s. 研究PA绳,绳端沿绳方向分速度相等,有vPcos(60°-α)=vA=1 m/s,得 cosα=2cos(60°-α)= 2(cos60°cosα+sin60°sinα)= 说明此时小球P速度大小等于B端拉绳的速度,速度方向恰好沿PB方向.(B)对. 另外,当代网络技术、现代信息技术的不断发展与进步更是提高了大学生流行语的传播速度。QQ软件、微博、微信等各种app的发明和使用,也更扩大了流行语在校园中甚至在当代社会中的传播途径,使得大学生流行语更为流行。 方法2:画矢量图法. 图6 如图6所示,小球P速度矢量可分解为沿PA方向和垂直PA方向,沿PA方向分速度为1 m/s,所有满足条件的速度矢量为由P指向CD虚线.同理,小球P速度矢量也可分解为沿PB方向和垂直PB方向,沿PB方向分速度为2 m/s,所有满足条件的速度矢量为由P指向EF虚线.二者同时满足时,速度矢量为由P指向CD与EF的交点,此交点恰好在PB线上.可知P速度大小为2 m/s,方向沿PB方向.如图所示.(B)对. 图7 方法3:微元法. 图8 如图8所示,设经过一段时间Δt,PA绳缩短PP1=vAΔt,绳端P所有可能的位置是以A为圆心,以P1A为半径的圆弧上,PB绳缩短PP2=vBΔt,绳端P所有可能的位置是以B为圆心,以P2B为半径的圆弧上,小球P的实际位置为两个圆弧的交点P′,如图所示.线段PP′=vPΔt,表示Δt时间内小球P的位移,也是Δt时间内的平均速度的方向.当Δt→0时,P1P′远小于半径P1A,P1P′弧可视为直线,这时P2P′弧长趋近于0,可见P′落在PB上.所以小球P瞬时速度方向指向PB方向,速度大小vP=vB.(B)对. 思考1:小球P的速度方向若指向PA、PB之外,在真实情景中能否发生? 根据方法2中矢量图6,该时刻P瞬时速度方向理论上讨论如下. 当vB→∞时,P速度方向趋近于与PB夹角30°,这是P可能速度方向的右边界. 当vB>2 m/s时,P的速度方向指向PB之外. 当vB=2 m/s时,P的速度方向指向PB. 当0.5 m/s 当vB=0.5 m/s时,P的速度方向指向PA. 当vB<0.5 m/s时,P的速度方向指向PA之外. 当vB=0时,P速度方向与PA夹角30°,这是P可能速度方向的左边界. 图9 通过作图软件,得到了当vA=1 m/s,vB分别取不同值,并且以后保持不变,小球P以后的运动轨迹.如图9所示.轨迹在P处的切线方向即为小球P此时的速度方向. 从左到右,vB分别为(单位:m/s)0.05、0.25、0.5、0.75、1.0、1.5、2.0、4.0、20. 可见,在理论上小球P此时的速度方向有可能指向PA、PB之外的. 需要注意的是,小球P不是在该位置从静止开始运动的,而是在该时刻前已经在运动,运动到此位置时已经具有了速度. 图10 在两绳拉力和重力作用下,小球P速度方向怎么可能偏向两绳之外呢?在狗拉雪橇的分析中可知,力的方向与速度方向没有直接关系,与速度变化率(即加速度)的方向对应.即小球P所受3个力合力的方向与极短时间内小球P速度变化量Δv的方向一致,如图10所示. 我们可以实际做做这个实验. 找两根绳,中间系一重物P,找两个合适的挂钩固定在墙上.当一端A用手拉着不动时,另一只手拉着B慢慢拉动,此时B的速度虽然小,但符合vB远大于vA情形.我们发现重物P在以A为圆心做圆周运动,当运动到题中位置时,速度沿圆的切线方向,指向A、B绳所夹区域的外侧.我们还可以改变拉或放A、B绳的快慢,重物P可做不同的运动,甚至可以让它在水平方向往复运动.若拉绳速度过大,可能导致某根绳松弛,这时原来的速度关系就不成立了. 2013年上海高考第20题与本题相似. 图11 例2.如图11为在平静海面上,两艘拖船A、B拖着驳船C运动的示意图.A、B的速度分别沿着缆绳CA、CB方向,A、B、C不在一条直线上.由于缆绳不可伸长,因此C的速度在CA、CB方向的投影分别与A、B的速度相等,由此可知C的 (A) 速度大小可以介于A、B的速度大小之间. (B) 速度大小一定不小于A、B的速度大小. (C) 速度方向一定在CA和CB的夹角范围外. (D) 速度方向一定在CA和CB的夹角范围内. 通过对上题的分析,此题正确答案选(B)就在情理之中了. 思考2:若滑轮为动滑轮时,绳端速度又有什么关系呢? 图12 例3.如图12所示,水平竖直细杆固定,杆上分别套有小环A、B,一根不可伸长的细绳一端系在水平杆右端O点,另一端穿过水平杆上的小环B,系在套在竖直杆上的小环A上.开始时小环B位于小环A的正上方,A、B间距离为h,绳子处于拉直状态.当拉着A向下以速度vA匀速运动时,细线带着小环B在水平杆上向右运动.求 (1) 当细线与竖直杆夹角为θ时,小环B的速度vB; (2) 判断小环B的运动性质. 图13 解析: (1) 方法1:微元法. 设经一段时间Δt(Δt→0),如图13所示,A移动到A′,位移vAΔt,B移动到B′,位移vBΔt,过A做AB平行且相等的线段AC,过B做AC的垂线垂足为D,由几何关系可得 方法2:相对运动法. (2) 取两杆拐角处为坐标原点,向右为x轴正方向.经时间t,A位移vAt,B位置坐标为x,斜绳长为h+x,有(h+x)2=x2+(h+vAt)2.得 通过本题可以发现,水平绳端点O速度一直为0.很明显,滑轮运动时,绳两端速度沿绳方向的分量就不再相等.这时我们选滑轮为参考系,绳两端相对滑轮速度沿绳方向的分量就相等了.若不换参考系,抓住绳长不变建立关系就非常关键了. 图14 位于贵州的大型射电天文望远镜FAST,球面反射天线直径达500 m,观测不同方向的天体时,接收反射电磁波的馈源仓就需要移动到不同的位置.馈源仓借助周围高塔上的6根牵引绳悬吊在空中.6根牵引绳另外一端连在精密牵引电机上.6组电机牵拉着绳端按设计好的速度同步收或放牵引绳,就可控制馈源仓按设计要求运动了.如图14所示. 为了简单起见,简化三根缆绳在二维平面上牵引馈源仓,情景如下. 图15 如图15所示,平面直角坐标系中,3个定滑轮的坐标分别为A(xA,yA),B(xB,yB),C(xC,yC).通过3个定滑轮的牵引绳拉着馈源仓P,假设牵引绳一直是绷直状态.若要馈源仓P绕着定点D(xD,yD)做半径为r,角速度为ω的匀速圆周运动,3根牵引绳的的PA部分、PB部分和PC部分长度LA、LB及LC应按什么规律变化呢?电机拉绳的速度又应按什么规律变化呢? 设t=0时,馈源仓P位置坐标(xD,yD-r)逆时针旋转.t时刻,P位置坐标为 x=xD+rsinωt, y=yD-rcosωt. 把x、y代入得 图16 取正三角形ABC边长为100,圆心D位于三角形中心,半径r=30,馈源仓到3个定滑轮的长度LA、LB及LC随时间的变化规律如图16所示.3个长度对时间求导,即可得到电机牵引缆绳的速度随时间的变化规律. 射电天文望远镜FAST的馈源仓由6根缆绳牵引,可在三维空间移动.真实环境中还要考虑缆绳在重力作用下的弯曲及形变,通过缆绳牵引实现对馈源仓高精度的控制,对FAST团队的挑战还是很大的. 以上是笔者对速度的合成及力的合成的粗浅的认识.随着研究的深入,困惑也越来越多,感觉到其中的物理的本质并没有理解透彻.希望物理同仁们一起研究,用更好的方法,更精炼的语言,挖透其中蕴含的深刻的物理本质.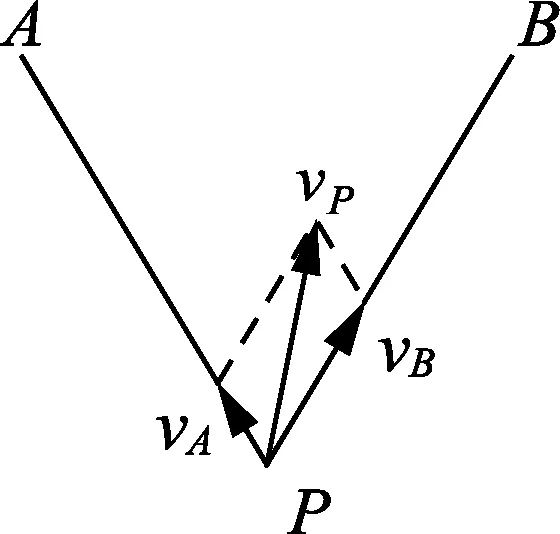




2 解决问题



3 引发的思考




4 绳拉物体运动模型的应用




5 感悟
