基于超微型水轮发电机的智能电磁阀系统设计
2020-07-15潘鹤立郑超明钟凤林潘东明
潘鹤立,郑超明,钟凤林,潘东明
(1 福建农林大学园艺学院,福州 350002;2 福建农林大学研究生院,福州 350002)
0 引 言
我国属于中度缺水国家,水资源区域在我国呈现不均匀分布,其中农业用水占到总量的60%以上,农业灌溉中大水漫灌现象严重,2016年连续第十三个中央一号文件[1]持续聚焦农业,提出十三五期间扩大农田有效灌溉面积、进一步提高粮食产能以及推进农业现代化的远景目标,对农业节水特别是水资源的高效利用提出更高的要求。近年来,物联网技术在农业灌溉上的应用日渐增多,有大量的学者与研究人员对其进行了系统研究和设计[2-7]主要的应用集中在土壤墒情传感器采集系统以及灌溉决策应用系统的研究与应用[8-10],而农业物联网对灌溉的控制主要集中在水肥一体化以及电磁阀的远程控制,随着无线技术的更新换代,农业物联网的技术迭代速度加快,从ZigBee[11-14]进入到了LoRa[15]、LTE-Luat时代[16],而NB-IOT也在紧锣密鼓的战略部署中,随着技术的革新,农业的智能灌溉从有线时代即将进入无线时代。
中国的节水灌溉设备的产业规模与灌溉的需求基本供需平衡,但是在灌溉设备的控制领域,特别是在电磁阀与现代农业信息技术的结合上还需进行更深的研究[17]。节水灌溉系统一直是研究人员研究的重点方向,谢家兴等[18]开发了荔枝园智能节水灌溉双向通信和控制系统,唐立军等[19]设计了节水灌溉联动控制系统,陈智芳等[20]设计了一套节水灌溉管理与决策支持系统,曹成茂等[21]研究了无线数据传输在节水灌溉自动控制中的应用,但鲜见对节水灌溉的关键节点电磁阀的电源进行研究。我国目前现有的农业物联网控制绝大多采用ZigBee、Lora等技术制造的控制器进行远程控制灌溉,虽然已实现手机GPRS远程控制,但仍存在着诸多局限性:一个控制器一般只能接8路控制开关,电源仍需接有线电源等。而中国有很多地区都属于山地丘陵地形,普遍供电、网络设施不足[22],并且电源、网络布线工程繁杂。龙晓明等[23]设计了基于LoRa的山地果园远程监测系统,采用太阳能供电解决了一部分供电需求,肖令禄等[24]设计了一种基于ZigBee的分布式节水灌溉系统,实现了根据土壤墒情传感器与电磁阀在软件上的联动启动与关闭功能。但这些系统的研究侧重点均放在了远程控制的软硬件设计上,没有研究如何将供电、远程控制、电磁阀高度集成为一体的问题。
近年来,太阳能发电已被用于物联网系统中作为电源,刘晓初[25]等研究了一种新型太阳能全自动节水灌溉设备,但所设计的太阳能板面积较小,电磁阀功耗等并未进行深入的计算,并无法实现手机远程控制;李光林等[26]、刘柯楠等[27]、李加念[28]、纪建伟[29]等人分别将太阳能运用于柑桔园自动灌溉、基于GPS的太阳能平移式灌溉机导航、微灌系统恒压供水自动控制以及无线传输的稻田灌溉监控系统中,取得了良好的应用,但是未见太阳能作为电磁阀的供电电源的阐述。张舒哲等[30]研发了基于太阳能锂电池为供电电源的智能喷灌系统,但仅用于草坪灌溉。刘永鑫等[31]在太阳能低功耗滴灌控制装置的研究中深入分析了电池功耗和寿命、电磁阀功耗以及太阳能发电效率,取得了很大的进展。李加念等[32]在柑橘园低功耗滴灌控制器的研究中对电磁阀、通信控制模块、电池都做了大量的研究,具有较大意义。但目前仍未见使用超微型水轮发电机作为智能灌溉系统供电电源的报道。
我国幅员辽阔,山区有较多区域的农场太阳能不足,如果单独使用太阳能作为唯一电源容易造成供电不足的现象。因此,本团队设计并开发了以超微型水轮发电机为主要供电,太阳能薄膜辅助供电,基于LTE-Luat远程通信控制模块的智能电磁阀的集成系统。这一集成系统的研发设计,将为节水灌溉智能控制的“电源+通信”无线化做出一定的贡献。
1 整体系统设计
该系统整体设计如图1所示。系统主要分为三大部分:①电源部分:超微型水轮发电机、太阳能发电板、DC24V可充锂电池以及稳压整流电路等;②LTE-Luat通信控制模块硬件及软件设计;③双稳态脉冲型电磁阀(见图2)。

1-超微型水轮发电机;2-电磁阀;3-稳压整流电路;4-DC24V太阳能板;5-DC 24V可充锂电池;6-LTE-Luat通信控制模块图1 结构示意图Fig.1 Structure diagram
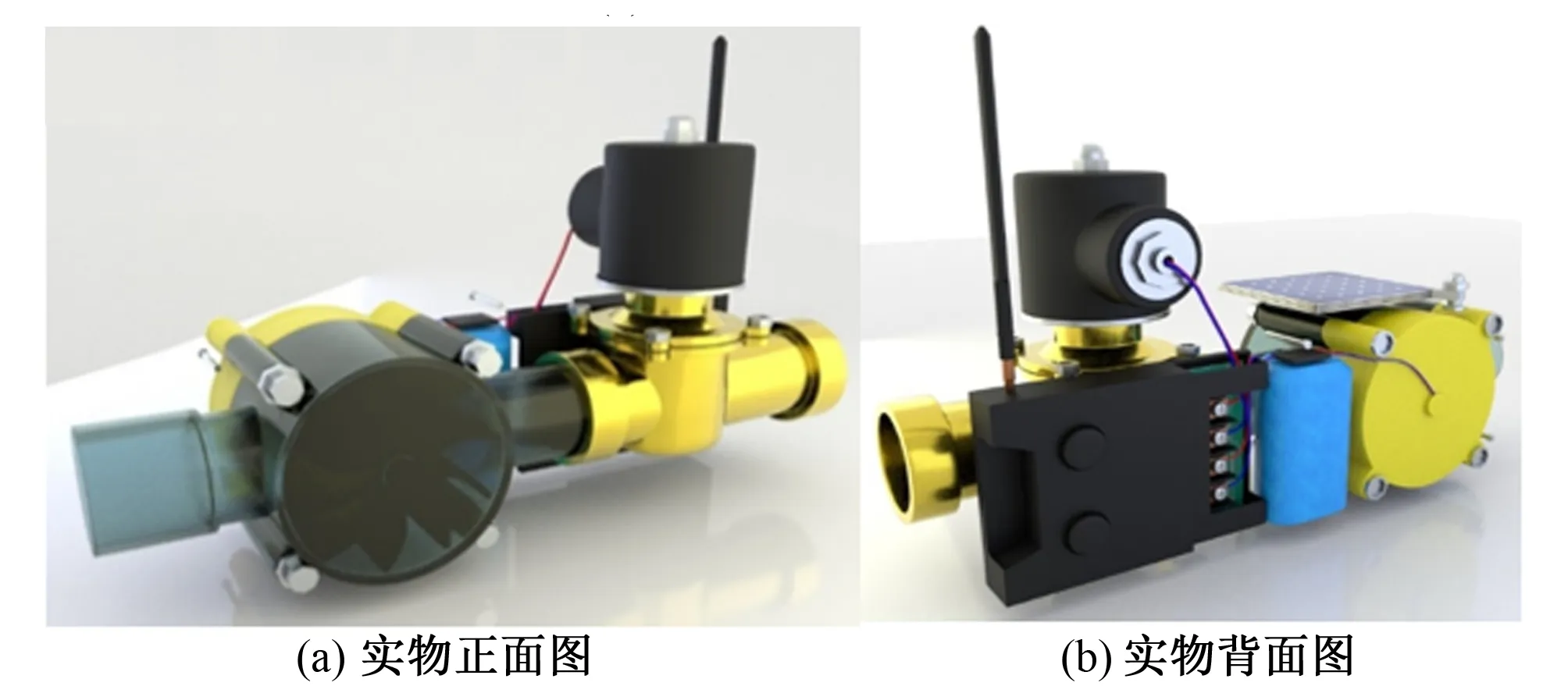
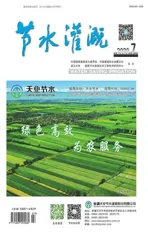
图2 实物图Fig.2 Physical view
该系统的工作原理是以超微型水轮发电机为主要发电设备,太阳能板为辅助发电设备为DC24V可充锂电池充电,锂电池作为电源为LTE-Luat通信控制模块和电磁阀供电,循环使用水能和太阳能。
1.1 电源模块硬件设计
电源模块的设计是整个系统最重要的部分,为了保障整个智能电磁阀系统的供电完全依靠水力发电和太阳能发电自给自足,对超微型水轮发电机和太阳能板进行合理设计、可充锂电池的合理选型,对于整个系统的正常运行极其重要。既要尽可能地提高发电效率和发电量,又要降低电磁阀的功耗,在这里将对电源模块里的各个部分的设计以及计算做出详细的阐述。
1.1.1 超微型水轮发电机与灌溉管路相关流体参数计算
在该智能电磁阀电源模块中,采用超微型水轮发电机作为主要的发电源,选用的发电机参数如图3所示。

图3 超微型水轮发电机进水压强、流量与发出电压关系图Fig.3 Relation diagram of intake pressure and flow velocity with output voltage of ultra-micro hydro-generator
根据选用的超微型水轮发电机参数:出水口开放最高耐压1.2 MPa;启动水压0.05 MPa,输出最大电流200 mA;输出最大电压直流稳压24 V。根据图3,可知要发出24 V以上电压需要0.15 MPa的水压,在0.15 MPa的水压对应的水流量为9 L/min,换算为每秒流量即为0.000 15 m3/s。
Q=SV
(1)
式中:Q为流量,m3/S;S为水管截面积,m2;V为流体流速,m/s。
S=πR2
(2)
式中:S为水管截面积,m2;π为圆周率3.14;R为水管半径,m。
综合公式(1)和(2),根据不同管径水管求出不同管径的水管中的流速,如表1所示。
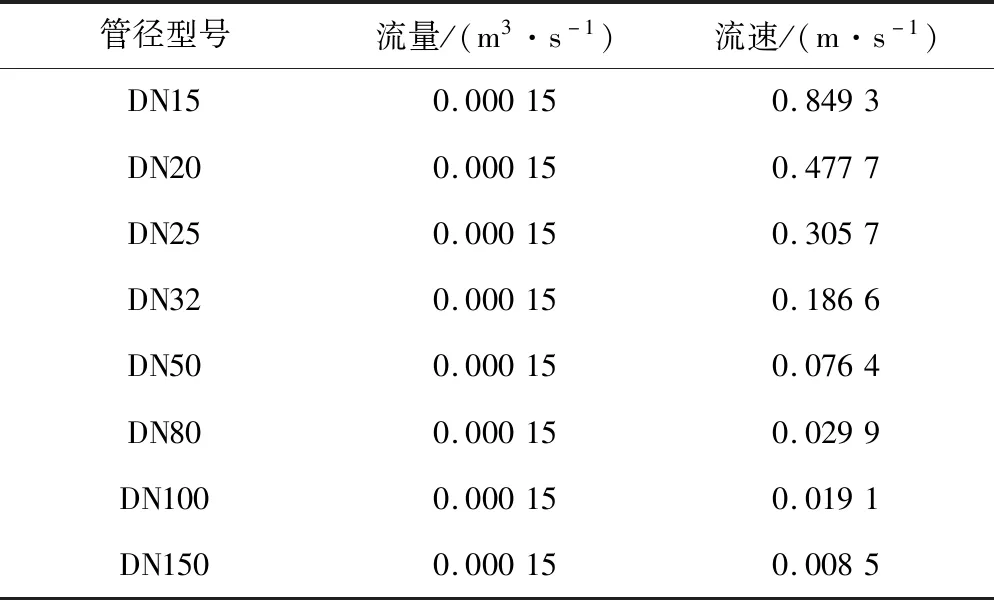
表1 不同管径下最低要求流量与流速关系表Tab.1 Relationship between minimum required flow and flow rate under different pipe diameters
根据恒定总流能量方程-伯努利方程[32]:
(3)

根据计算结果图4可得出在不同的蓄水池高度下管口自然流出的流体流速,高度1 m以上的情况下即可满足超微型水轮发电机发出24 V的最低流速要求(表1)。

图4 不同蓄水池高度下管口自然流出的流体流速图Fig.4 Flow velocity of natural outflow from the nozzle at different reservoir heights
1.1.2 太阳能辅助发电模块以及电池容量设计
根据选用的超微型水轮发电机参数:输出最大电流200 mA和输出最大电压直流稳压24 V。选用的6串可充锂电池DC24V,容量有以下可选:6 800、8 000、 9 800 mA·h等。考虑到选用的电磁阀为脉冲型电磁阀,通信控制模块为LTE-Luat型号,耗能较小,以及电池体积等原因,选择6 800 mA·h容量即可满足系统要求。
超微型水轮发电机只有在电磁阀打开的情况下才能够发电,因此需要添加辅助发电设备太阳能板,以保证充足的电力供应。假设蓄水池落差以及灌溉管路设计合理的情况下,计算在超微型水轮发电机正常工作状态下多久能充满一次电池。根据锂电池充电时间公式:
(4)
式中:T为充电所需时间;M为电池容量;I为充电输出电流;1.2为充电系数。
超微型水轮发电机输出最大电流200 mA,取100、150、200 mA代入公式进行计算得出(表2)。
表2 超微型水轮发电机输出电流与充满电池的时间关系表Tab.2 Time relationship between output current of micro hydro-generator and full battery
选用小尺寸的太阳能板,参数为额定电压18 V,功率30 W,工作电流1.5 A。根据公式(4)可计算出在正常工作状态下5.44 h可充满电池1次,平均1 h可充电18.38%。太阳能充电板与超微型水轮发电机各有利弊,适用的场景也各有不同,相辅相成充电效果最佳,因此选择两者共同发电供电的方案。
1.2 LTE-Luat通信控制模块设计
目前农业物联网通信控制器控制数量一般不超过16路,采用最多的是8路控制器,已实现手机远程控制功能。但由于控制数量的局限以及依旧依赖有线电源供电,因此在实际的智慧灌溉智能控制设备安装过程中,仍然存在着上诉局限性,如图5所示。
鉴于传统物联网控制器的局限性,本系统采用单个电磁阀配套单个通信控制模块的方式,将通信控制模块集成至单个电磁阀中,摆脱有线的束缚。根据图6,用户通过手机APP或小程序向云服务器发出控制电磁阀开关的命令,云服务器与通信控制板的物联卡进行通信,传达控制命令,LTE-Luat芯片对控制命令进行处理,并向继电器的I/O口发出通断指令,从而达到通断电磁阀电源的目的。通信控制板的电源与电磁阀的电源都是由24 V可充锂电池供应。图6右侧为本设计使用的通信控制板实物,芯片选用上海合宙通信科技有限公司的Air720H芯片,该芯片工作温度范围为-35~75 ℃,能够满足室外较恶劣的自然环境要求。
由于该套设计方案采用的是DC24V锂电池作为供应电源,与模块供电电压4.4 V压差较大,根据芯片特性,如果输入电压与模块的供电电压之间存在比较大的压差,需要使用DCDC开关电源转换器,电路如图7所示。
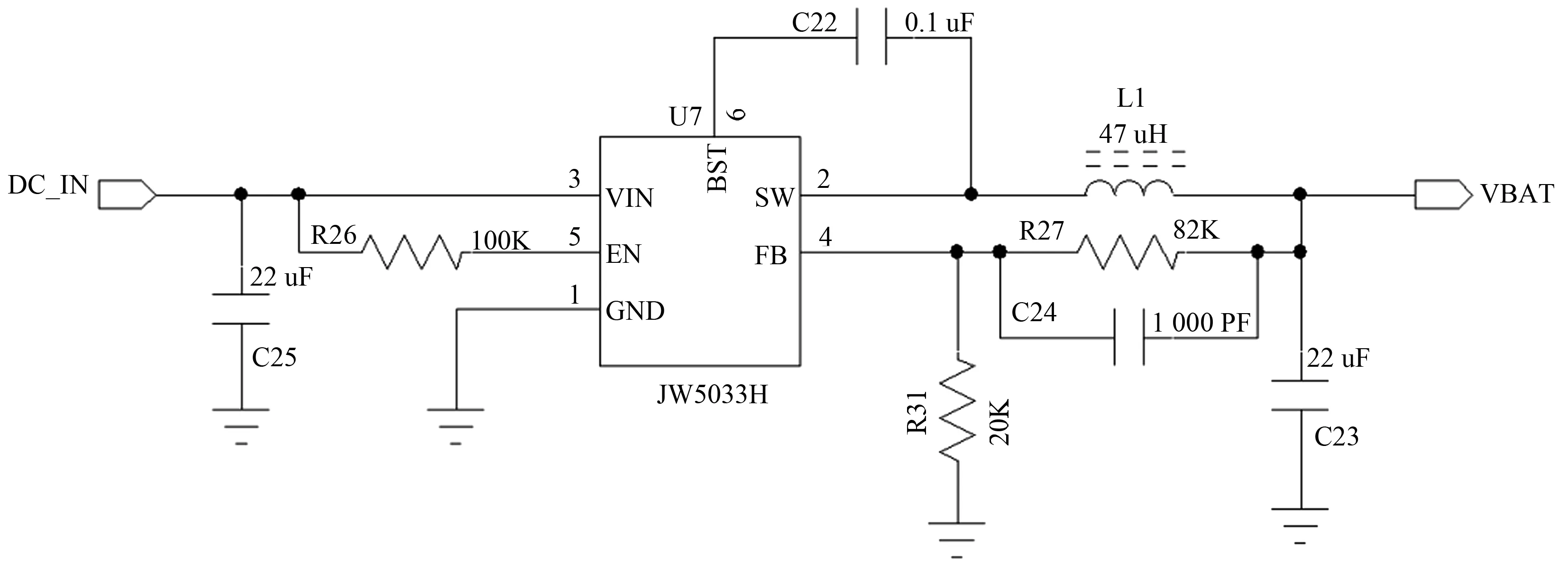
图7 DCDC供电输入电路Fig.7 Input circuit of DCDC power supply
通信控制模块待机模式和正常工作模式下电压3.8 V,供电电流根据通信标准不同而有不同,为了更了解能耗方面的区别,分别对待机模式和工作模式进行了能耗方面的测试,结果如图8所示。

图8 待机模式与工作模式下不同制式的电流与功率值Fig.8 Current and power values of different modes in standby mode and working mode
实际的灌溉情况下,每日的通信控制模块待机模式的时间是非常长的,大部分作物的灌溉时间占每日总时间很小,因此通信控制模块的工作模式也是较短的,从图8可知,待机模式下最大的功率是在LTE标准下,只达到了0.015 2 W,电流为3 mA,而正常工作模式下最大功率也是LTE标准,值为1.888 6 W,电流为497 mA。由于该系统只需要传送控制命令,因此一般来说选择GPRS标准即可满足要求,功耗也是最低的。
1.3 电磁阀选型
在整个系统当中,用电设备主要有两个模块,一个是通信控制模块,另一个就是电磁阀。从上文分析可知通信控制模块功耗较低,而电磁阀如果选用传统的常闭、常开等类型的型号,耗电量较大,不适合该系统的要求,基于低功耗节能的要求,本系统选用YCL11自保持双稳态脉冲型电磁阀,未通电时(初始状态)处于关闭状态,在活动铁芯自重和弹簧力的作用下封住阀口,电磁阀关闭。当线圈给一个正向直流脉冲信号,激磁回路形成磁场并产生磁力、活动铁芯受电磁力的作用上移打开阀口,电磁阀打开。电磁阀打开后断电,在线圈内部永久磁钢作用下失电后仍使电磁阀保持打开状态。如要关闭电磁阀时,给线圈一个直流反向脉冲信号,即可关闭电磁阀。
YCL11自保持双稳态脉冲型电磁阀工作电压范围为DC6V、12 V和24 V,可根据需要进行选择。它的瞬时通电时间为30~50 s,阀体在开启或关闭后不需要持续通电保持状态,因此只有在线圈通电发出正向或反向脉冲信号时才有功耗,满足该系统的节能需求。该电磁阀的类型参照李加念等的选型[33],经过测试,与其测试结果基本一致。该系统所采用的可充DC24V锂电池与通信控制模块电源模块可满足当水压≥0.8 MPa时要求的3.5V以上电压需求。
2 测试及结果
2.1 测试装置设计
为了测试该系统中充电性能与功耗,本团队组装了一套测试装置如图9所示,由一台可调扬程的水泵模拟不同高度的蓄水池,在管路的两侧各有一台流量传感器和水压测试仪监控进水口和出水口的流量与水压,使用手机微信小程序通过通信控制模块来控制电磁阀与水泵的开关,当电磁阀处于通路状态,超微型水轮发电机发电,通过稳压电路进行整流与稳压至DC24V,对可充锂电池充电,锂电池为通信控制模块以及双稳态脉冲电磁阀供电。
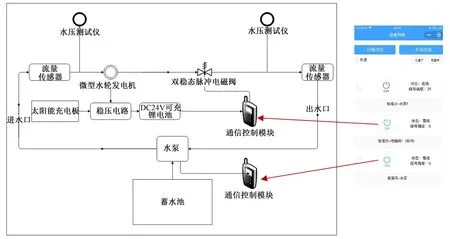
图9 测试装置示意图Fig.9 Schematic diagram of test device
2.2 测试方法
在测试试验中,可充锂电池初始为充满电状态,理论上只要超微型水轮发电机发出的电量大于等于电磁阀和通信控制模块用电量就满足系统要求,因此可推导出下列公式:
B+S≥P电磁阀+P通信控制模块
(5)
式中:B为超微型水轮发电机发电量,mA·h;S为太阳能充电板发电量,mA·h;P电磁阀为电磁阀耗电量,mA·h;P通信控制模块为通信控制模块耗电量,mA·h。
2.2.1 通信控制模块耗电量计算
太阳能充电板与超微型水轮发电机的充电效率在上文已经计算过,因此在该测试环节重点测试通信控制模块与电磁阀的耗电量,首先断开两种发电机与电池的输入端,使用充满电的6 800 mA·h的锂电池单独对通信控制模块与电磁阀供电,参照李加念等计算电池寿命的计算方法[33],该系统的通信控制模块设定每60 s唤醒一次,控制器全速工作一次的时间取1 ms计算,根据上文图8通信控制模块在3种制式下的待机模式与工作模式时的电流值,通过公式(6)[33]计算通信控制模块1 d所消耗的电量。
式中:C1为通信控制模块1 d所消耗的电量,mA·s;Iq为通信控制模块休眠时的电流,mA;Ia为通信控制模块工作时的电流,mA;Ie为通信控制模块执行电磁阀开或关动作时的电流,mA;N为灌溉的次数,因每次灌溉需要电磁阀开和关各动作一次,每次动作时间取50 ms。
为了计算方便,Iq,Ia,Ie都取通信控制模块工作在3.8 V时的电流上限值,在GPRS、WCDMA、LTE 3种标准下Iq分别为3、2、4 mA,Ia分别为32、30、53 mA,Ie分别为388、489、497 mA,N取10,即通信控制模块每天执行10次灌溉。
2.2.2 电磁阀耗电量计算
本系统选用的型号YCL11双稳态脉冲型电磁阀参数为流体温度-10~120 ℃,工作电压DC24V,工作压力0.03~1.6 MPa,阀体材质为不锈钢sus304,线圈类型L11B,功率12 W,开关动作通电时间为0.025~0.1 s之间。根据直流电流计算公式可方便的计算出工作时电磁阀线圈电流Is为500 mA,实测电磁阀开关动作时的实际电流大小为543 mA,再根据公式(7)[33]来计算1d电磁阀的耗电量。
Cs=0.1Is×2N
(7)
式中:Cs为电磁阀1 d所消耗的电量,mA·s;Is为电磁阀进行开关动作时的线圈电流;N为灌溉次数,因每次灌溉需要电磁阀开和关各动作一次,每次动作时间取上限值0.1 s。
由公式(6)可计算出在GPRS、WCDMA、LTE 3种标准下通信控制模块的1d耗电量各为26 363、17 839和35 128 mA。
由公式(7)可知,假设一天灌溉10次,1 d电磁阀总耗电量为1 086 mA。
2.2.3 电池使用寿命计算
电池的使用寿命可用公式(8)[33]计算:
(8)
式中:T为电池寿命,d;C为电池的额定容量,mA·h。
将公式(6)、(7)代入式(8)进行计算,若电池额定容量C为6 800 mA·h,则电池使用寿命T在GPRS、WCDMA、LTE 3种标准下分别为89.18、129.35和67.60 d。也就是说在没有超微型水轮发电机和太阳能充电板的情况下,一个充满电的额定容量为6 800 mA·h的锂电池可以在3种标准下保证至少89、129和67 d的使用(每日灌溉次数为10)。
3 结 论
根据上文可知,超微型水轮发电机每小时充电效率为1.23%~2.45%,即在40.8~81.6 h之间可充满一次额定容量为6 800 mA·h的锂电池,而太阳能充电板在正常工作情况下5 h左右便可充满电池,充电效率在正常情况下可达到每小时18.38%。在没有超微型水轮发电机和太阳能充电板的情况下,一个充满电的额定容量为6 800 mA·h的锂电池可以在3种制式下保证至少89、129和67 d的使用。也就是只要保证1 d内两种发电机至少为电池充入1.12%(1/89)、0.77%(1/129)和1.49%(1/67)的电量即可满足整个系统的用电需求,该系统不论是超微型水轮发电机还是太阳能充电板的充电效率都超过了所要求的充电效率,可完全保证系统持续运转,符合系统设计要求。
在试验过程中发现该系统关键的部分有三部分,第一,今后应该重点研发和改进超微型水轮发电机的发电效率;第二,重点研发和改进双稳态脉冲电磁阀的性能,使其耗电量更低;第三,通信控制模块正在采用NB-IOT芯片进行测试,以期今后的功耗更低。
该系统的设计、安装、调试与试验均在福建农林大学园艺学院田间实验室中进行,该系统的研制成功的意义重大,将为智慧农业中的智慧灌溉扫除有线电源、有线网络这一阻碍,将大大降低智能灌溉的基础建设成本。但由于试验还只是在实验室模拟中进行,与真实的农场环境还有很大区别,并且还要考虑管路设计不同对流体流速、水压的影响,不同经纬度、海拔、太阳入射角等方面对该系统发电的影响,今后还需将对这些方面进行进一步的研究。