基于DDS的超声驱动电源系统设计
2020-07-14庞宇袁鹏飞阳妙
庞宇 袁鹏飞 阳妙

摘 要: 针对超声驱动电源系统工作易失谐,传统信号发生方式频率易漂移、精度低等问题,提出一种基于DDS的超声理疗仪驱动电源设计。驱动电源系统以STM32单片机为主控平台,利用DDS信号发生器产生超声激励信号,经功率放大器处理后,实现驱动信号的高稳定和高精度。驱动电源系统后端采用串联匹配电路进行阻抗匹配,并利用锁相环技术进行超声驱动信号的频率跟踪。经过实验测试表明,该系统具有输出功率稳定、输出驱动信号频率自动调整、工作安全等特点。
关键词: 超声驱动电源; 系统设计; 信号处理; 阻抗匹配; 频率跟踪; 系统测试
中图分类号: TN752.6?34; TP318.6 文献标识码: A 文章编号: 1004?373X(2020)10?0018?03
Design of ultrasonic driving power supply system based on DDS
PANG Yu, YUAN Pengfei, YANG Miao
(Chongqing Key Laboratory of Optoelectronic Information Sensing and Transmission Technology,
Chongqing University of Posts and Telecommunications, Chongqing 400065, China)
Abstract: In allusion to the problems that the driving power supply system is easy to detuned, the frequency of the traditional signal generation mode is easy to drifting, and the precision is low, a DDS?based driving power supply design of ultrasonic physiotherapy instrument is proposed. In the driving power supply system, the STM32 single?chip is used as the master control platform, and DDS signal generator is used to generate ultrasonic excitation signal, which is processed by the power amplification to realize the high stability and high precision of driving signal. The series matching circuit is applied to the back end of the driving power system for the impedance matching, and the phase?locked loop technology is used for the frequency tracking of ultrasonic driving signal. The experimental results show that the ultrasonic driving power system has the features of stable output power, automatic frequency adjustment of output driving signal, safe operation and so on.
Keywords: ultrasonic driving power supply; system design; signal processing; impedance matching; frequency tracking; system testing
0 引 言
传统信号发生器工作不稳定,信号频率和占空比不易调节,频率上限低,而超声驱动电源要求能够输出频率具有连续的、稳定的和可调的电压信号。在实际工作过程中,由于系统环境的变化,换能系统的固有谐振频率会发生漂移,导致换能系统工作于非谐振点,使得系统转化效率降低,换能器大量积热。
为此,本文将STM32L151C8T6作为核心控制器,基于直接数字式频率合成技术,设计一种超声驱动电源系统。系统后端采用串联匹配电路进行电路阻抗匹配,同时比较不同跟踪方法,选取锁相环控制方式实现频率的自动跟踪。
1 硬件系统设计
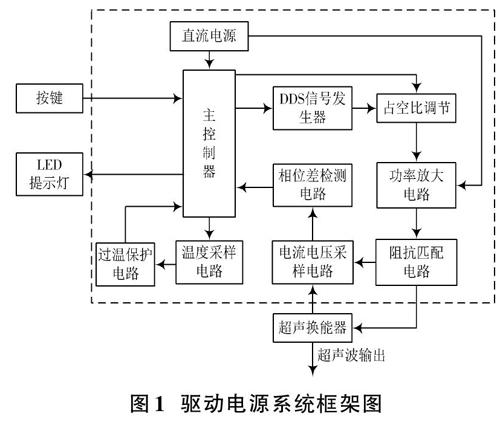
图1为超声驱动电源总体框架。图中虚线框内是驱动电源的主要组成部分,包括直流电源、主控制器电路、信号发生电路、功率放大电路、阻抗匹配电路、过温保护电路和相位检测电路;虚线框外为人机交互部分和负载部分。
1.1 电源控制电路
驱动电源控制板有三种电压制式:功率管供电(12 V)、信号发生器供电(5 V)、主控芯片供电(3.3 V)。12 V可充电锂电池直接为功率放大电路供电;信号发生电路通过线性稳压芯片LM7805将12 V电压转化为5 V进行供电;主控芯片电路采用稳压芯片TLV70033将5 V电压转化为3.3 V进行供电。
1.2 DDS信号发生电路
本文采用AD9833信号发生器,其电路连接如图2所示。通过串行总线连接主控制器,将主控制引脚配置成SPI总线模式配合AD9833进行数据传输。采用16 MHz有源晶振,输出信号频率上限可达64 MHz。
1.3 阻抗匹配电路
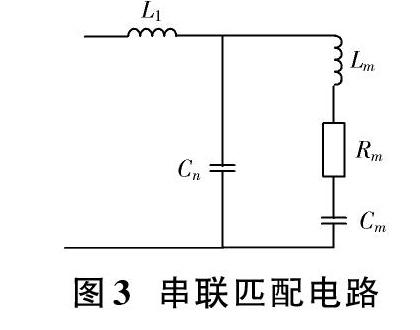
超声换能器作为驱动电源的负载,其阻抗特征常呈容性,容性阻抗的存在会使得系统的无功功率增加,故需在驱动电源和换能器之间进行阻抗匹配。本文选用串联电感的方式来抵消换能器容性阻抗的影响,其等效电路如图3所示。
图3右端回路为换能器等效电路,其中[Cn]为换能器的静态电容,[Lm,Rm,Cm]是由换能器质量、机械损耗近似折算过来的等效参数。当换能器工作于谐振状态下时,换能器端呈纯阻性,基于此串联支路阻抗可用[Rm]近似。系统的整体阻抗为:
[Z=Rm1+wsCnRm2+jwsL1-wsCnR2m1+wsCnRm2] (1)
式中,[ws=2πfs]。由谐振状态下换能器阻抗呈纯阻性可得到串联电感[L1]的大小为:
[L1=C0R2m1+wsCnRm2] (2)
串联匹配电路总阻抗为:
[Z=Rm1+wsCnRm2] (3)
本文选用平面压电陶瓷片作为超声换能器,换能器参数如表1所示。
根据上述公式可计算出串联电感[L1]为10 μH。
1.4 功率放大电路
由于AD9833输出激励信号强度不足以驱动超声换能器,故需将激励信号进行功率放大。功率放大电路如图4所示,超声激励信号经逻辑芯片74HC74D分频滤波处理后,送入栅极驱动芯片UCC27525进行后续放大。经放大处理后的超声驱动电压信号可达40 V,可直接驱动超声换能器工作。通过单片机产生PWM波控制栅极驱动器使能端,实现对超声输出功率的间接控制。
2 控制系统设计
2.1 锁相环频率控制的实现
超聲驱动电源工作在非谐振状态下时,换能器两端的电流电压信号相位会发生偏差。根据这一原理,本设计采用锁相环(PLL)控制技术来实现频率控制。锁相环控制的原理如图5所示。
锁相环主要分为三部分:鉴相器(PD)、低通滤波器(LF)和压电振荡器(VCO),DIV为分频器。鉴相器的作用是比较输入其中的两路信号的相位信息,并且输出一个相位差的电压信号。压电振荡器是一种电压频率转换装置,输入电压信号决定了输出频率的大小,当电压信号随着频率的调节而逐渐变小时,说明相位差也在逐步缩小,直至电压信号消失,环路锁定。锁相环控制精确程度取决于鉴相电路性能的好坏,本文设计的鉴相电路如图6所示。
图中,U1和U2为过零比较器,作用是将输入同频率的电压信号和电流信号转换为同周期的方波信号,U3和U4为两个反相器。若D触发器输出端1Q输出为逻辑高电平,则电流超前电压;若为逻辑低电平,则电流滞后电压。U5为与非门,则U5输出信号的占空比反映了两方波信号相位的误差大小。当输出信号的占空比为50%时,表示两方波此时同向。
2.2 控制系统软件设计
软件控制流程如图7所示。系统上电以后,首先进行中断复位、启动代码配置、系统时钟和中断分组控制器初始化,然后进行各个模块所用资源初始化。在完成初始化以后,系统就进入周期性轮询状态,主要是扫描按键输入。
系统子模块(包括功率控制、频率自动跟踪和过温保护等软件模块)的功能均以子程序形式在中断函数中实现,这样可以保证系统的实时性和软件整体的层次性。
3 测试结果与分析
为了验证本设计中的超声驱动电源的可行性和超声产生效果,基于上述的设计方案制作了一款超声驱动电源。超声驱动电源控制板如图8所示。
设定DDS信号发生器的初始信号频率为2 MHz,并利用示波器测量激励信号和驱动信号的波形。测试波形如图9所示,激励信号方波占空比为50%,频率为2 MHz。该驱动正弦波频率为1 MHz,波形无畸变,说明装置工作稳定。
4 结 语
本文设计一款以STM32为主控制器的超声驱动电源,激励信号发生采用直接数字式频率合成技术;分析换能器的电路结构,采用串联匹配电路结构来实现电路阻抗匹配;功率放大利用栅极驱动芯片和Boost电路来实现。频率跟踪利用锁相环技术(PLL)来实现频率控制。经过试验测试表明,本装置能够输出稳定、功率和频率可调的超声驱动信号,有很好的实用价值。
参考文献
[1] 李夏林,朱武.基于DDS技术的超声电源系统的设计[J].上海电力学院学报,2017,33(1):81?85.
[2] 屈百达,倪正龙.基于Fuzzy?DDS的超声换能器频率自动跟踪系统[J].压电与声光,2014,36(1):156?158.
[3] 余建,赵小勇,贺良国,等.基于Boost拓扑的手持式超声刀驱动电源设计[J].机电工程,2018,35(8):863?867.
[4] WANG H P, WANG F, WANG Q, et al. Design and implementation of ultrasonic detection system based on substation inspection robot [J]. Manufacturing automation, 2012, 15: 10?17.
[5] 徐晓伟.压电超声换能器的阻抗匹配分析[J].压电与声光,2014,36(5):745?747.
[6] 陈鹏,覃庆良,冯宇平.频率自动跟踪超声波电源设计[J].应用声学,2017,36(6):533?539.
[7] 周爱爱.基于DSP控制的超声波脉冲电源系统的研究[D].重庆:重庆理工大学,2016.
[8] 林书玉.超声技术的基石:超声换能器的原理及设计[J].物理,2009,38(3):141?148.
[9] 王磊,王时英.压电换能器T型匹配电路的优化[J].压电与声光,2014,36(5):861?864.
[10] 潘鹏翔,林伟,施淑媛,等.基于DDS的超声波按摩仪的设计[J].电脑知识与技术,2018,14(5):257?259.
