兆瓦级风力发电机振动检测与保护实现
2020-07-14杨鹤立
杨鹤立
(东方电气风电有限公司,四川 德阳 618000)
0 引言
兆瓦级风力发电机是刚柔组合的多体系统,随着风力机组额定功率的增加,叶片的刚度越来越小,对其控制精度的要求也更高。当风机叶片在风作用下绕中心轴转动运行时,作用在风力机上的空气动力、惯性力和弹性力等交变载荷,使得叶片产生变形导致其转动惯量与分布质量发生改变,系统产生变形或振动,影响风力机的正常生产运行,严重时会导致风力发电机组设备事故。因此设计阶段应分析可能的谐振问题和引起谐振的运行区域,风轮、塔架、机械传动链的固有频率不能太接近,同时它们和激励源的频率也不可太接近,从而规避振动现象。大型变速机组的振动问题主要集中在4个方面:①风轮的气动效应。②受到气动效应和电气特性的激励引起的风力发电机传动链的扭曲振动。③偏航运动引起的滑移振动。④风轮-塔架耦合的整机振动。这几个振动源会相互影响相互作用,我们可以把四大振源简化成一个振动复摆模型来分析[1-2]。
1 风力发电机的振动数学模型及振动表现
风力发电机振动方式类似于物理中复摆的形式,复摆是刚体(机舱)绕固定的水平轴(塔筒)在重力的作用下作微小摆动的动力运动体系。摆动过程中机舱受到重力和传动链的回传惯量的反作用力,而回传惯量的力矩起着回复力矩的作用;如此反复动作构成了机舱在一定频率下的振动。机组的振动主要还是受到转动惯量Jr的影响。
(1)
式中Ω为风轮转动角速度,Tr为风轮吸收的动力矩,Td为传动链阻力矩,v为齿轮箱传动比倒数,Tm为高速轴力矩。由式(1)低速轴传动链动力学方程可以看出,风轮吸收的转矩、齿轮箱齿数比、风轮转速、高速轴发电机力矩都是影响风机振动的因素。其主要表现形式分为[3]:
1)在传动链转矩Tm、阻力矩Td所对应的振动:传动链一般包括主轴、主轴轴承、主轴轴承座、齿轮箱、齿轮箱支撑座、联轴器和高速轴制动器等部件,长时间的频繁振动将带来低、高速轴轴承滚动面的磨损,滚珠变形;振动也带来齿轮箱内部齿间啮合不到位产生打齿及磨齿现象,造成齿轮箱传动失效。
2)风轮转速Ω周期性运动引起的塔架-风轮振动耦合使得塔筒与叶轮产生共振,塔筒螺栓承受振动力方向上的疲劳载荷;小风情况下转速不能快速提升,共振持续作用在塔筒链接螺栓的螺杆面上将会造成螺栓断裂,严重的会造成倒塔事故。
3)Td所对应的偏航振动:机组在对风过程中执行偏航动作,偏航制动力产生与传动链转矩相反的偏航阻力矩,超标的偏航振动值将加速偏航轴承的磨损。偏航传动齿之间的啮合在剧烈振动下会产生铁屑,长时间将会导致偏航传动失效。
4)Td所对应的叶片振动: 叶轮叶片在空气中的湍流作用,导致每只叶片受力不均;叶轮在旋转过程中所承受的升阻比达不到设定值,引起叶片的摆振。严重时会造成叶片连接螺栓的断裂。
由此可以得出:当风力发电机组振动无法有效控制将会影响机组的正常运行,严重的会发生安全事故。即要确保证风力发电机的安全又要使得机组能稳定发电,那么机组的振动数据检测、采集、分析环节及监控保护动作逻辑将必不可少。故传感器测量数据的准确性与振动的安全保护显得尤为重要。
2 振动传感器工作原理及软硬件构成
2.1 传感器工作原理介绍
振动传感器采用三维加速度传感器,数据处理采用DSP,监控保护采用巴赫曼PLC MX312加看门狗电路,实现振动传感器在232通信传输与看门狗通路的双回路监控保护。由于振动类似于摆振,故选取传感器的数据采集物理量为振动加速度a,采用压电式传感器采集。由冲量公式可知加速度a受到风机吸收的转动惯量影响。转动惯量Jr包含了机组的的四大主要振动源,因而选取线性变量加速度a作为测量值是满足监控保护要求的;通过检测到的a值反应出机组的振动频率f,当f超过门限值主控采取保护动作[4]。
2.2 振动传感器主要硬件结构
1)MEMS加速度传感器:由多晶硅和差动电容组成,多晶硅又指压电晶体。晶体厚度受到加速度冲量作用产生变化,输出电压相应变化,a与输出电压v成正比。在此测量电路为4路输入,可任意分配给内部传感器及外部传感器,实现三维空间0°~360°X,Y,Z三坐标范围的振动测量。因为所有的振动可以在矢量上合计简化为一个单摆模型,为此只需要选取一个振动检测传感器安装在传动链齿轮箱弹性支撑架上便可实现整个机组在三维空间上各方向任意振源的叠加检测。
2)滤波及测量电路:考虑到不同的振源产生的不同振动频率及方向,选取3个Main滤波器分配给3路加速度传感器通道及其组合,实现X,Y,Z三维空间范围内振动信号滤波。这里采用IIR高通滤波器与II低通滤波器的组合形成带通滤波,其截止频率0~35 Hz可配置。监测量程0~40 m/s2可配置,测量取有效值、峰值或峰峰值。
3)DSP处理单元:DSP处理器采用TI公司的2812型处理器。主要由控制单元和信号输入输出单元组成。
4)看门狗回路:选择小型功率继电器与处理器之间加装三极管组成。当出现报警信号时处理器输出为零三极管导通截止,看门狗回路输出为零;主控接收低电平信号输出报警启动保护,看门狗电路中断属于紧急制动停机状态,处于最高一级报警;主要监控在频域振动超限信号,对应信号时间极短。
2.3 软件设计
软件主要包括:①传感器自检模块,实现上电初始化自检及数据监控。②DSP数据处理模块,包含A/D转换、数据存储和门限值判断。③看门狗输出模块,实现数据报警的制动控制。④通信模块,完成与上位机的数据交换、振动报警数据筛选和数据显示。
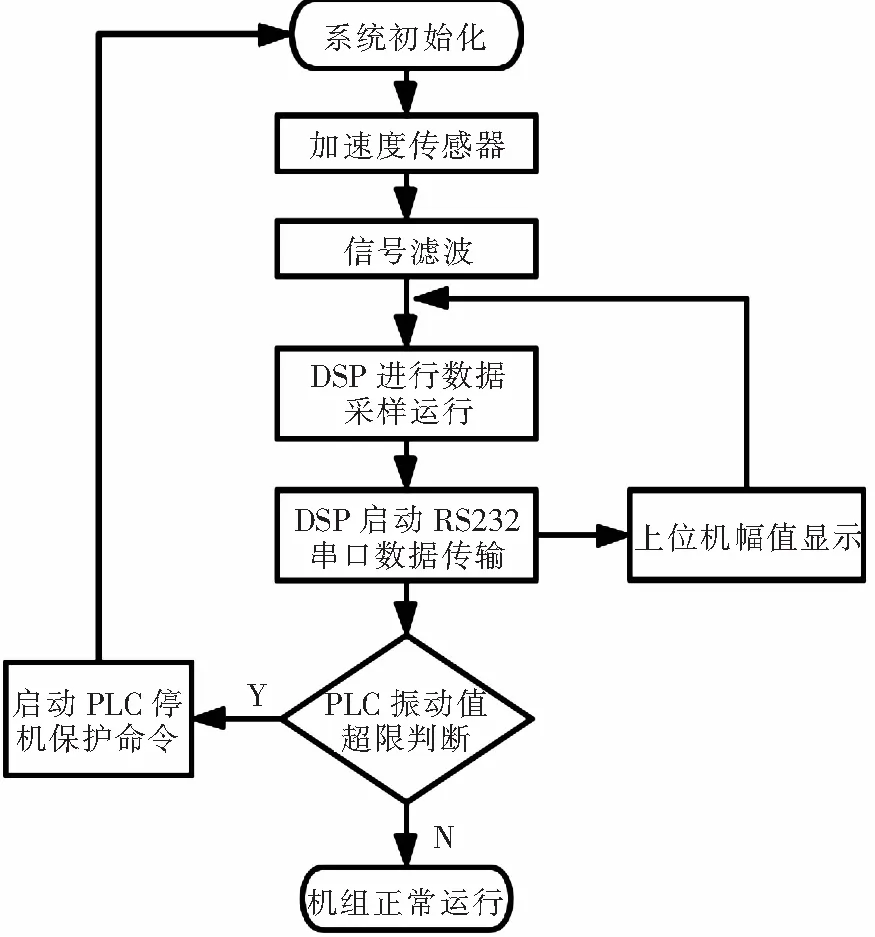
图1 振动检测模块的主程序流程图
图1是检测器件软件控制逻辑,系统上电先完成各硬件电路的初始化,存储器清零及系统自检。经过加速度传感器的数据输出,完成不可滤波干扰信号的辨别,遇到干扰则重新采集信号;无干扰则进入加速度电信号的带通滤波处理,之后完成A/D转换,并由CPU判断加速信号是否达到振动门限;超过门限则由看门狗硬保护电路实现停机保护动作。未达到则通过RS232传递信号至主控PLC,由PLC判断是否执行停机命令或采取振动规避动作;同时检测信号进入循环测量状态对机组振动实时检测。
3 机组振保护动作实现
PLC主控也可以通过所接收到的振动幅值和加速度值作用时间来判断是否需要执行停机保护制动或振动规避动作。机组出现保护动作的触发条件为:看门狗回路中断或振动通信发送设定的停机门限值[7]。
1)看门狗中断:看门狗回路的输入由DSP处理器内部继电器输出电路决定。当DPS在设定的极短时间内读取到到振动检测值大于预警值,立即启动内部继电器输出电路断开;主控单元24 V输入电压信号消失,触发紧急停机保护命令。此项触发对应的作用时间极短,时间上不连续,主要是在频域下进行的数据分析。
2)振动通信发送停机门限值:信号作用时间长且持续,振动传感器在连续时间内输出的振动信号达到了门限值,由PLC根据设定的算法采取相应的命令。除停机以外的其他规避执行主要分为3类:①通过控制算法的优化避开振动频率带,如优化驱动链的转矩阻尼。②机组的扇区管理。③叶片角度的调节降低不平衡转动惯量。
4 结语
本文从风力发电机振动原因阐述了风力发电机的力学振动模型,归纳分析了风机的主要四大振动源;揭示了振动对风电机组安全运行所带来的危害及振动监控保护的必要性。同时基于DSP处理器设计了振动检测传感器;分析并设计振动监控保护模块,进而实现了风力发电机组振动监测系统。随着新技术的发展和新算法(如人工智能)的开发,后续必将出现更加精准的检测器件和更加合理的监控保护系统以确保风电机组的安全运行。
