一种飞翼布局无人机族的机体结构优化设计
2020-07-14岳志星尹海莲余雄庆
岳志星,尹海莲,王 宇,余雄庆
(1.南京航空航天大学飞行器设计先进技术国防重点学科实验室,江苏 南京 210016)(2.南京航空航天大学中小型无人机先进技术工业和信息化部重点实验室,江苏 南京 210016)
无人机族是一组无人机型号的集合,其中各型号无人机之间有通用的部件或子系统,但飞行性能和使用要求不同,以此满足客户的不同需求[1]。采用无人机族策略可以大大缩短不同型号无人机的开发周期,有利于降低后期的维护成本,对未来无人机市场发展有强大的适应力[2]。单一类型的飞翼布局无人机结构优化方法已经比较成熟,但是模块化无人机族的结构设计优化方法还有待进一步探究。
世界上很多飞机制造公司都采用过飞机族策略,用来拓展飞机的不同用途。例如美国的波音747通过后续的各种改进或改型设计,发展出了多种型号,分别适应不同阶段的客运和货运市场的需求。B747基本型号包括 B747-100/200/300系列以及第二代B747-400 系列和最新的B747-8[3]。美国的联合攻击机JSF是美国进行的最大的战斗机研发计划,在设计初级阶段就采用了飞机族策略,为了同时供给不同军种完成不同的作战任务,共发展出3种不同的型号,包括空军陆基CTOL型战斗机、海军的舰载CV版本及垂直起降STOVL版本[4],即便3种型号的作战要求大相径庭,结构上仍具有相当程度的共通性。
飞翼布局无人机具有良好的气动特性,一直是未来飞机设计的研究热点。纵观飞翼布局飞机的发展历程,飞翼布局主要应用于大型轰炸机、小型无人作战飞机和无人侦察机。在飞翼布局无人机的研发阶段采用模块化无人机族策略,不仅能提高飞翼布局无人机产品的市场竞争力,还可以大幅度降低不同种类无人机的研发和制造成本。经过德、英、美、法等国对飞翼布局长期的探索和研究,飞翼布局在初期设计中遇到的性能和操纵等方面的问题都得到了妥善解决。但由于飞翼布局气动外形具有的特殊性,飞翼布局无人机结构设计与常规构型飞机有着很大差别,结构设计及优化方面的研究仍然面临巨大的挑战。
1 无人机族构型设计
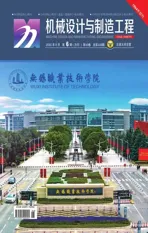
参照飞机族设计思想,把无人机族分为机身段和机翼段两部分。在无人机气动外形设计阶段,将不同的结构部件划分为不同的模块,其中机身段和机翼段分别为通用模块和专用模块。两类无人机的机身结构完全相同,可以实现机身模块共享[5];通过更换不同展长的机翼模块即可适应不同的作战环境。飞翼布局无人机族外形设计方案如图1所示。
1.1 结构方案设计
飞翼布局无人机族结构设计就是根据总体设计阶段获得的机身和机翼平面形状、各主剖面的翼型选择、部件连接的相对位置等参数,进一步确定两种类型无人机的结构布置方案。结构布置方案包括框数目与间距,机身框缘条尺寸及腹板厚度,翼梁(缘条和腹板)、翼肋(缘条和腹板)的布置方向及位置,整机各区域的蒙皮厚度等。无人机族采用硬壳式机身和双梁式机翼[6],为了保证结构模型的通用性,需保持机身部件和机身与机翼连接处结构布置形式一致。
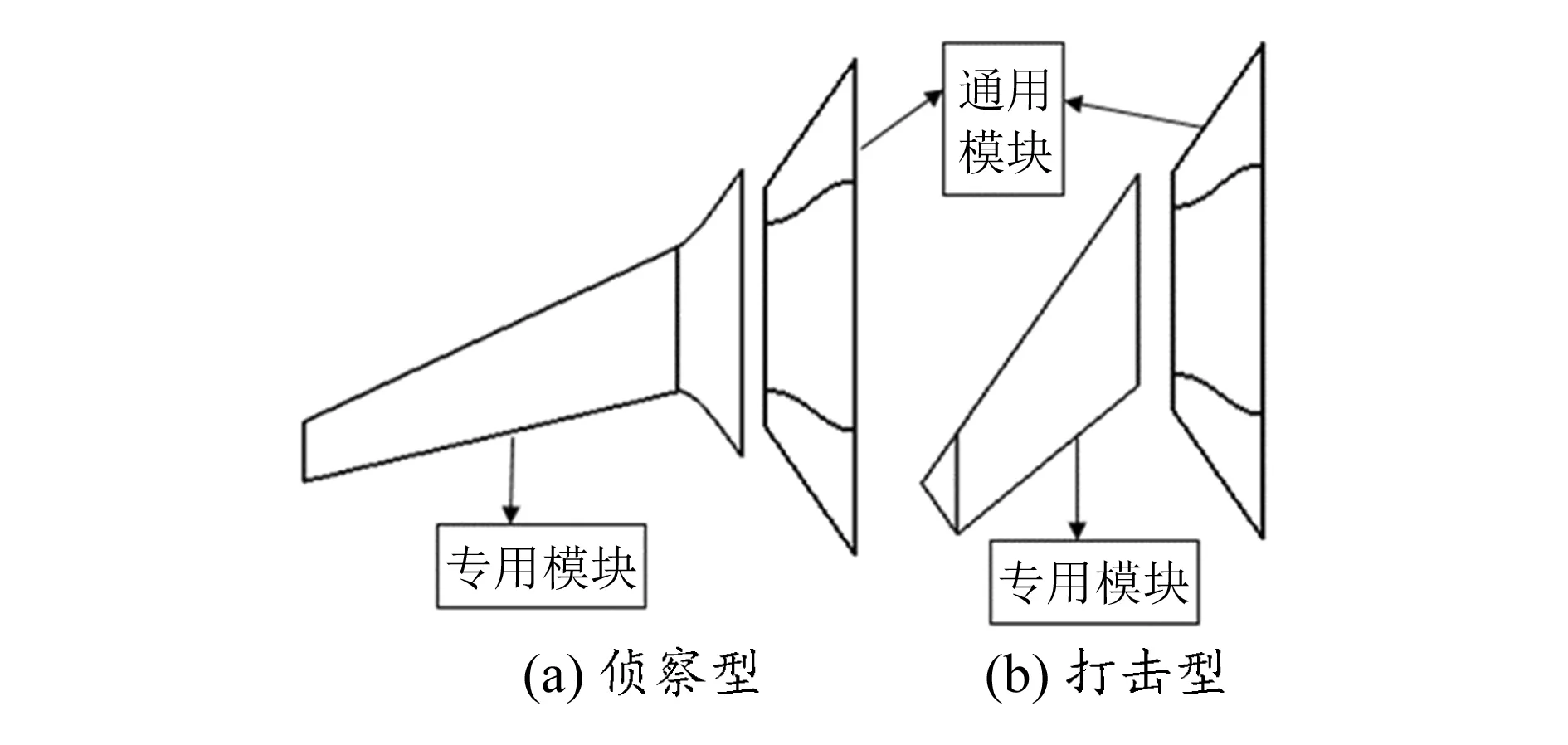
图1 飞翼布局无人机族外形设计方案
在设计飞翼布局无人机族结构时,首先将前后梁位置分别设置在翼根翼梢弦长的15%和65%处,然后由结构布置参数确定机身框的个数和位置:机身1号框与前梁连接,位于弦长的15%处;2号框垂直于机身对称面布置;3号框与机翼后梁相接,垂直于机身对称面布置;4号框后端与机翼后梁相接,前端位于机身対称面弦长的65%处。2号框和3号框布置在机身机翼连接转折处,承受翼梁传来的弯矩分量。机身纵向布置一道纵墙,位于机身对称面到机翼连接面的50%位置。机身框平面布置如图2所示。
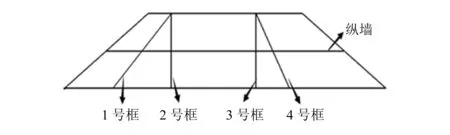
图2 机身框平面布置图
为了减轻机体的结构质量,提高翼肋结构传力效率,本文采用翼肋垂直前梁的布置方案[7]。根据设计经验,结合设计要求中飞机的飞行速度和机翼展长,确定打击型无人机翼肋间距为400 mm、侦察型无人机翼肋间距为500 mm,均匀布置在机翼内部[8]。前后梁腹板和缘条尺寸、蒙皮厚度、翼肋腹板和缘条尺寸从翼根到翼尖呈递减趋势变化。最终完成的打击型和侦察型无人机的结构布置模型分别如图3和图4所示。
1.2 结构有限元模型
本文采用MSC.Patran/Nastran软件建立结构有限元模型并进行静力分析,步骤如下。
1)几何建模:导入igs文件,重建曲面,生成几何模型。

图3 打击型无人机结构布置模型
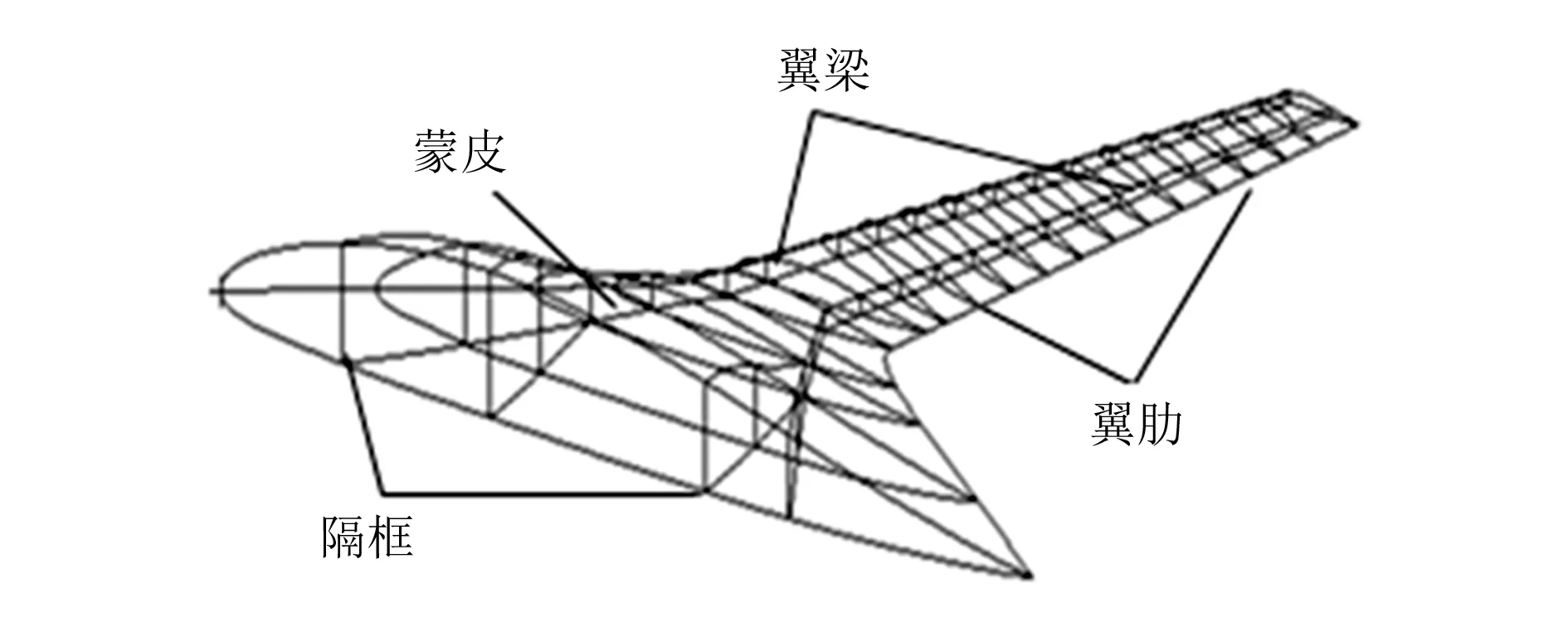
图4 侦察型无人机结构布置模型
2)网格划分:设置网格点和网格样式,划分网格。
3)定义材料属性:打击型无人机和侦察型无人机机身和机翼各结构部件均采用铝合金材料硬铝LY12,材料的弹性模量为69 GPa、泊松比为0.3、密度为2 700 kg/m3。
4)定义单元属性:为了简化结构模型,蒙皮、翼梁、翼肋和机身框腹板主要承受弯矩和剪力,设为壳单元;对应结构相交处的缘条主要承受轴向力,设为杆单元。
5)定义载荷及边界条件:机体的气动载荷通过定义的场函数形式加载到蒙皮上,打击型无人机设计过载为6,侦察型无人机设计过载为4。由于分析模型为飞翼布局无人机的一半,因此将边界条件设为机身对称面固支。
6)分析:选择分析类型,生成结构分析模型,调用MSC.Nastran进行静力分析。
整个流程利用Patran提供的二次开发语言PCL编写了参数化的程序,实现了结构模型从CAD软件CATIA到结构分析软件Patran/Nastran传递的无缝连接,整个过程均为自动运行。
2 考虑不同任务需求的单一类型无人机结构优化
结构优化的目标为打击型或侦察型无人机的整体结构质量最轻;设计变量主要包括蒙皮、梁、机身框和翼肋腹板厚度,以及相应结构上的缘条截面面积;约束条件包括结构件的尺寸约束、强度约束和最大位移约束。对结构模型优化参数、工况等条件定义完成后,就可以选择合适的优化算法对有限元模型进行结构优化。结构优化的流程如图5所示。
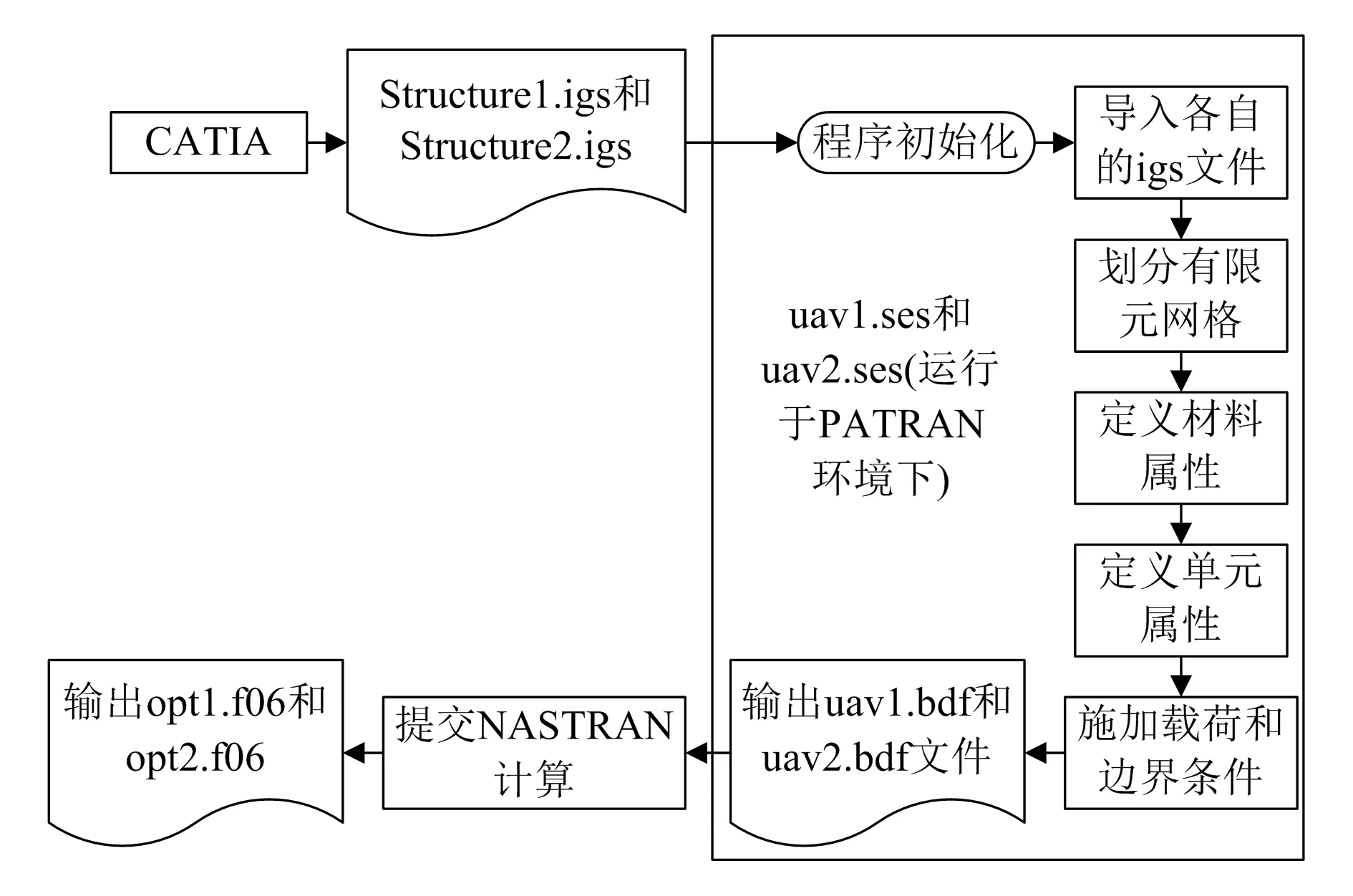
图5 结构优化流程
结构优化设计问题表述如下。
优化目标:全机结构质量最轻。
设计变量:打击型无人机和侦察型无人机设计变量的范围参见表1和表2。
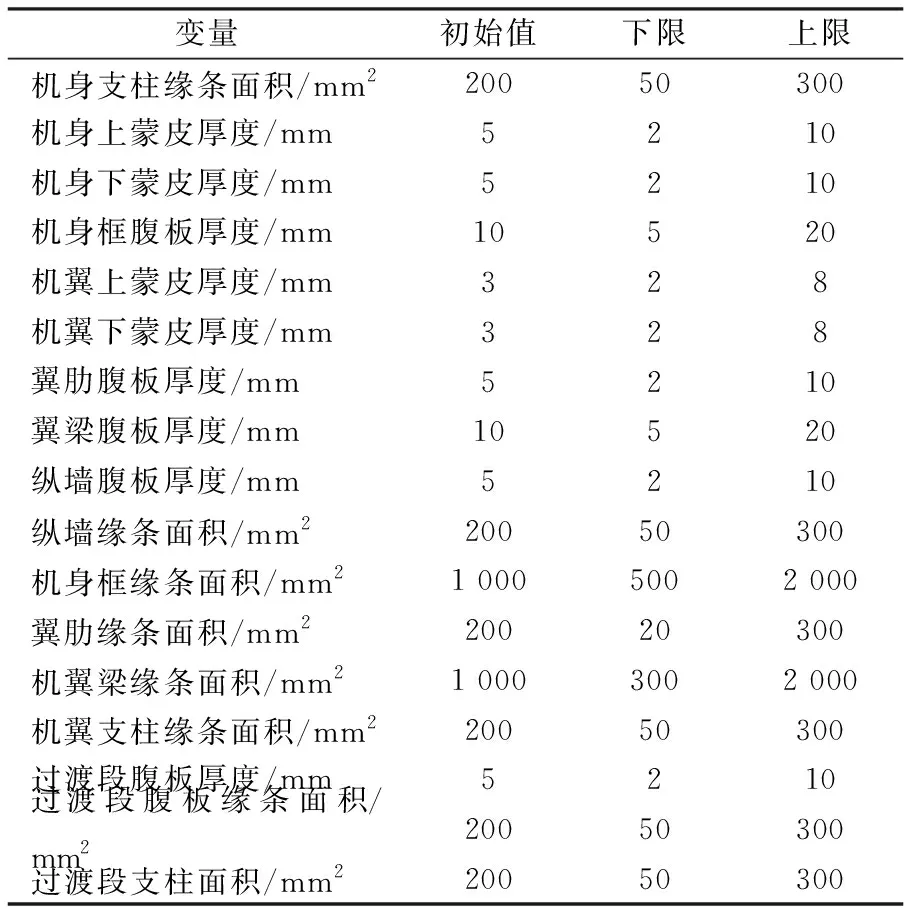
表1 打击型无人机结构尺寸设计变量
约束条件:缘条和支柱结构的正应力σ≤450 MPa,腹板和蒙皮结构的剪应力γ≤250 MPa;翼尖位移h≤5%机翼展长;屈曲因子λ≥1(屈曲准则)。
结构优化模型选用的优化算法为修正的可行方向法(modified method of feasible directions,MMFD),在MSC.Patran/Nastran环境下完成结构分析和优化。优化过程中保持初始结构布置方案不变,对结构件的尺寸进行优化。机身与机翼连接处应力较大,最大位移在机翼翼尖位置,优化结果满足应力和位移约束。打击型无人机结构优化应力云图和位移云图分别如图6和图7所示,图8和图9所示分别为侦察型无人机结构优化的应力云图和位移云图。
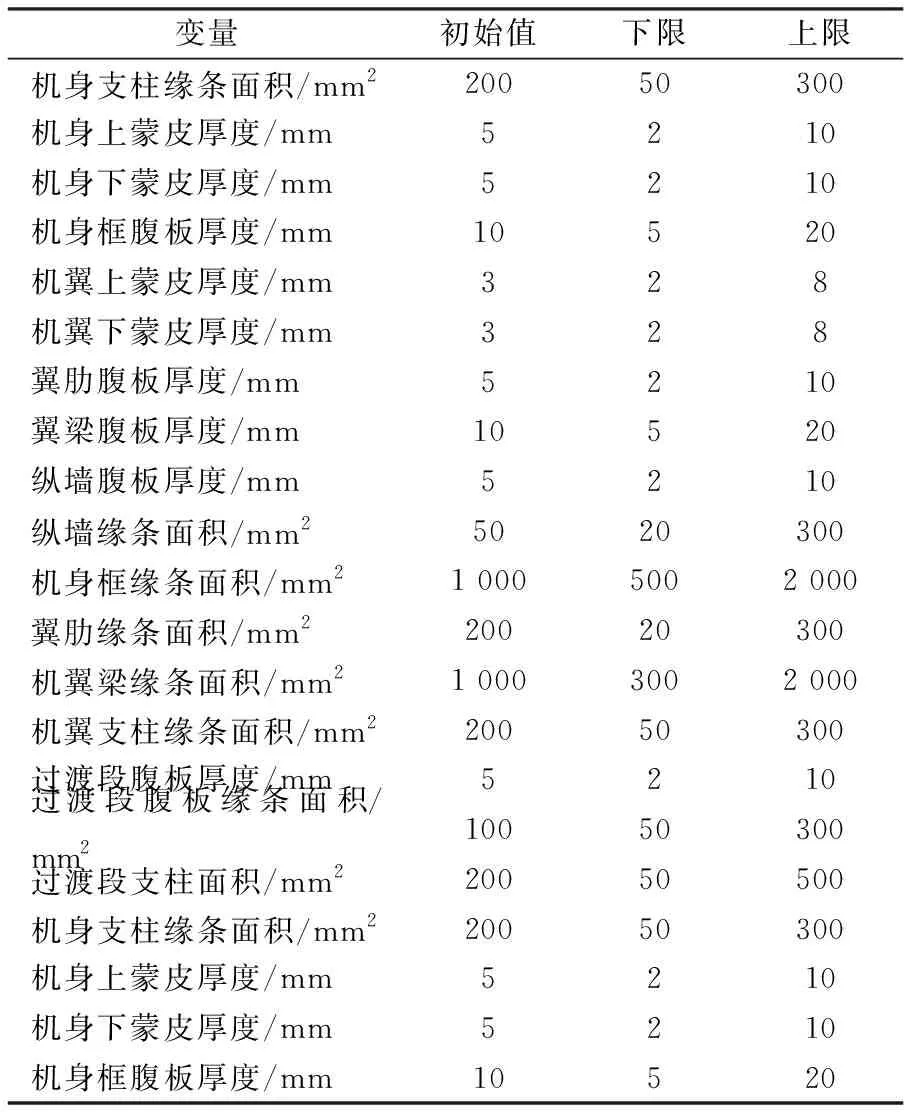
表2 侦察型无人机结构尺寸设计变量
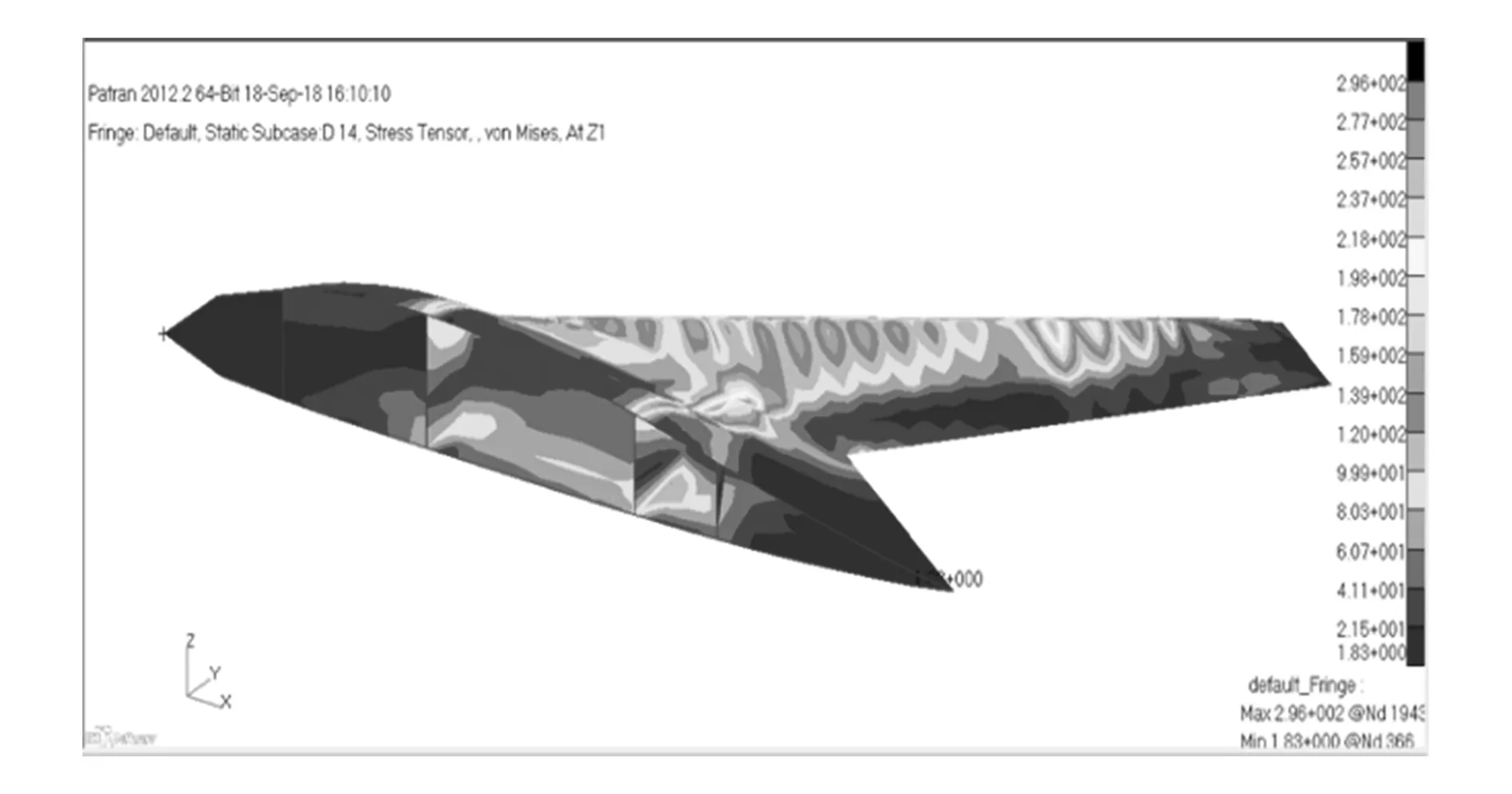
图6 打击型无人机应力云图
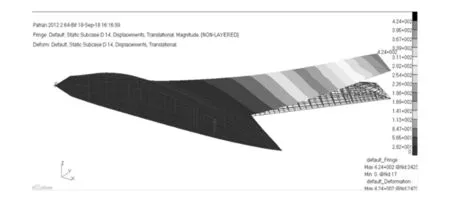
图7 打击型无人机位移云图
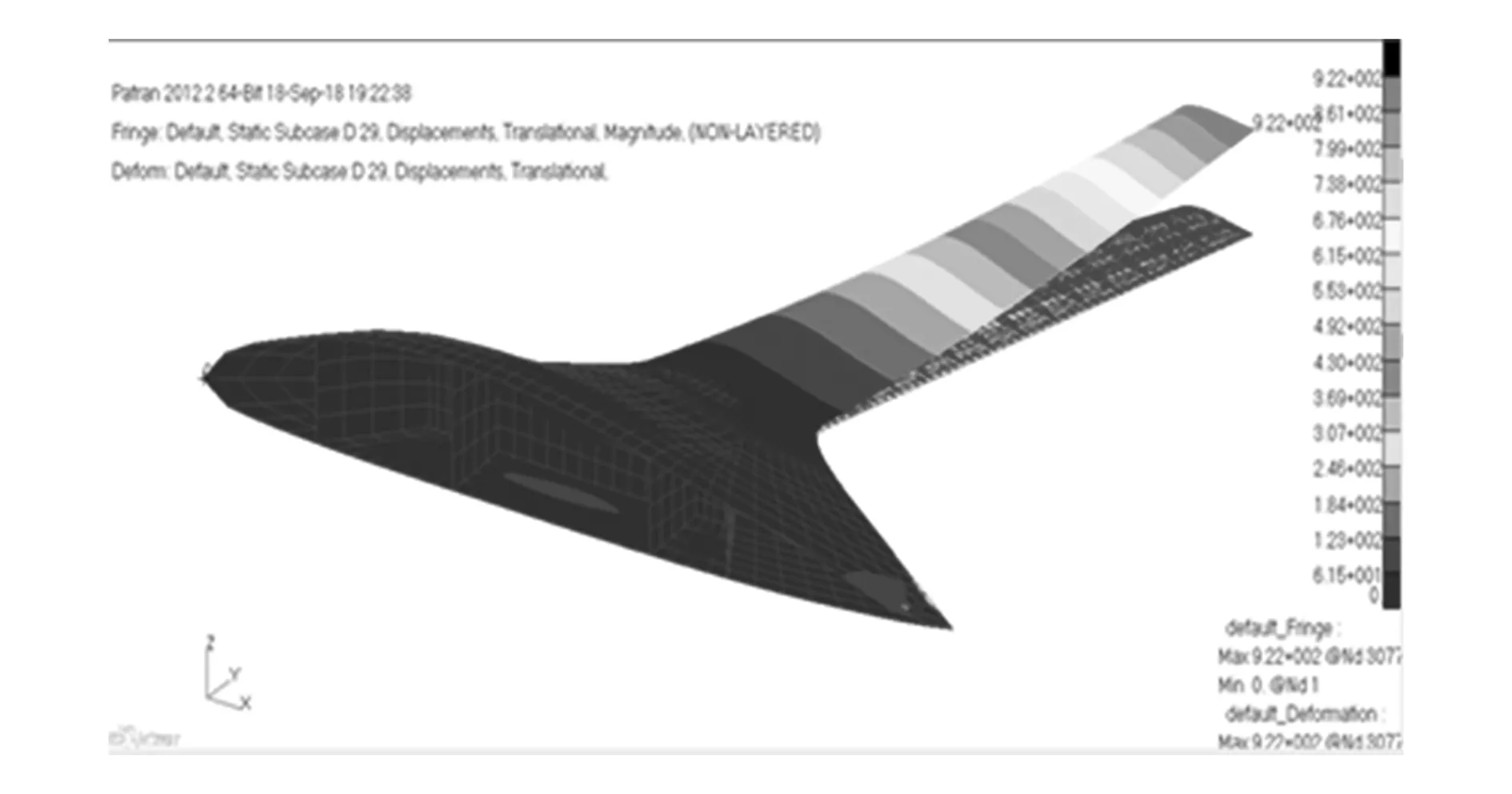
图8 侦察型无人机应力云图
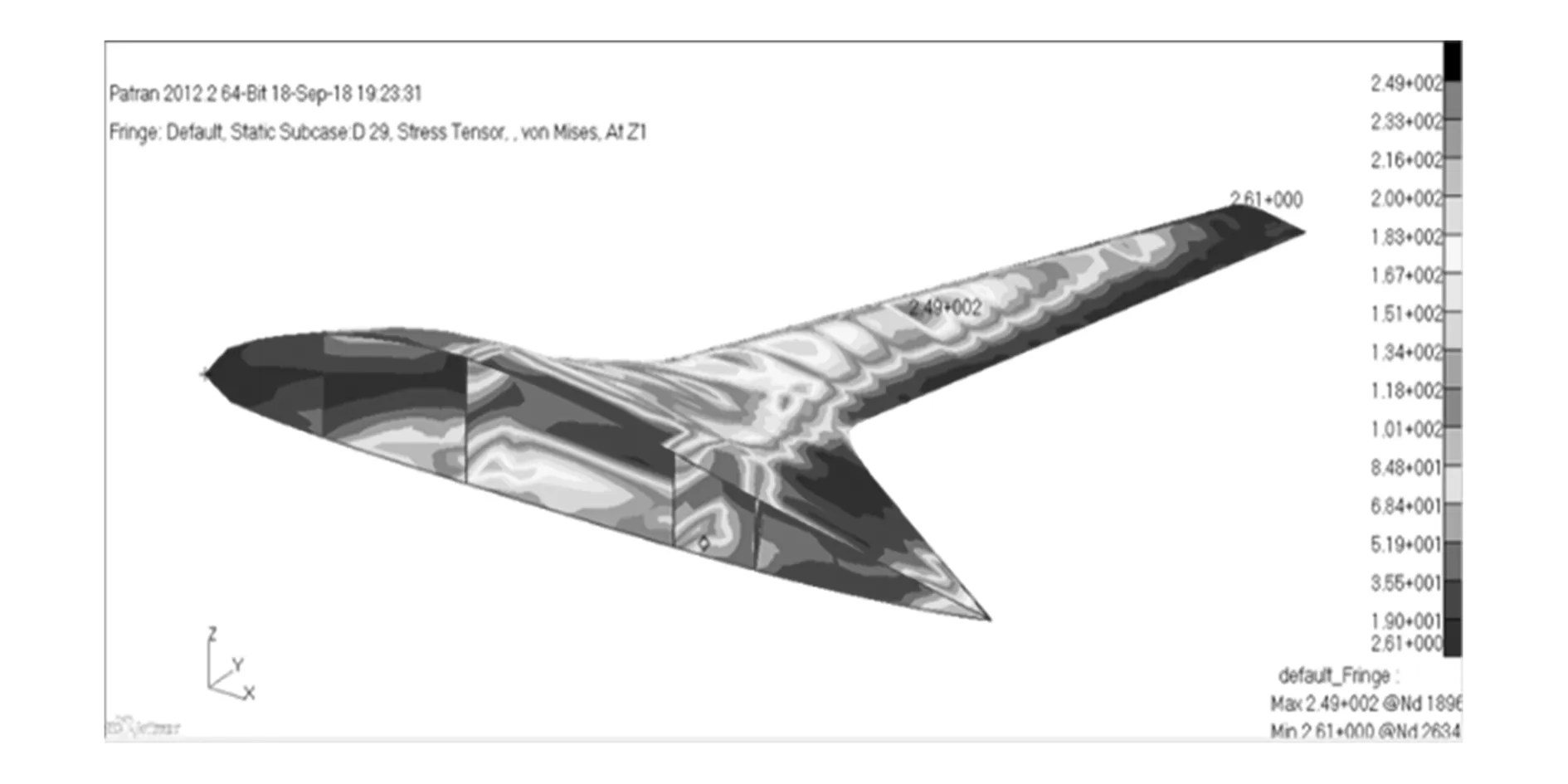
图9 侦察型无人机位移云图
3 考虑通用性的无人机族优化设计方法
飞翼布局无人机族结构优化问题的难点是:在同时满足两种类型无人机应力和位移约束的情况下,确定无人机机身(通用模块)和机翼(专用模块)的结构尺寸参数,使两种类型无人机机体结构质量最轻[9]。要使优化后两种类型无人机通用模块的结构设计变量保持一致,一种有效的策略是将优化分为两个层次:通用模块的优化定义为系统级优化、专用模块定义为子系统级优化[10]。由于Patran无法对两种构型无人机通用模块和专用模块同时进行优化,因此使用Isight软件进行集成。打击型无人机和侦察型无人机的结构优化是并行分析计算的,相互之间没有耦合,计算时分别调用Nastran[11]。二级优化基本框架如图10所示。
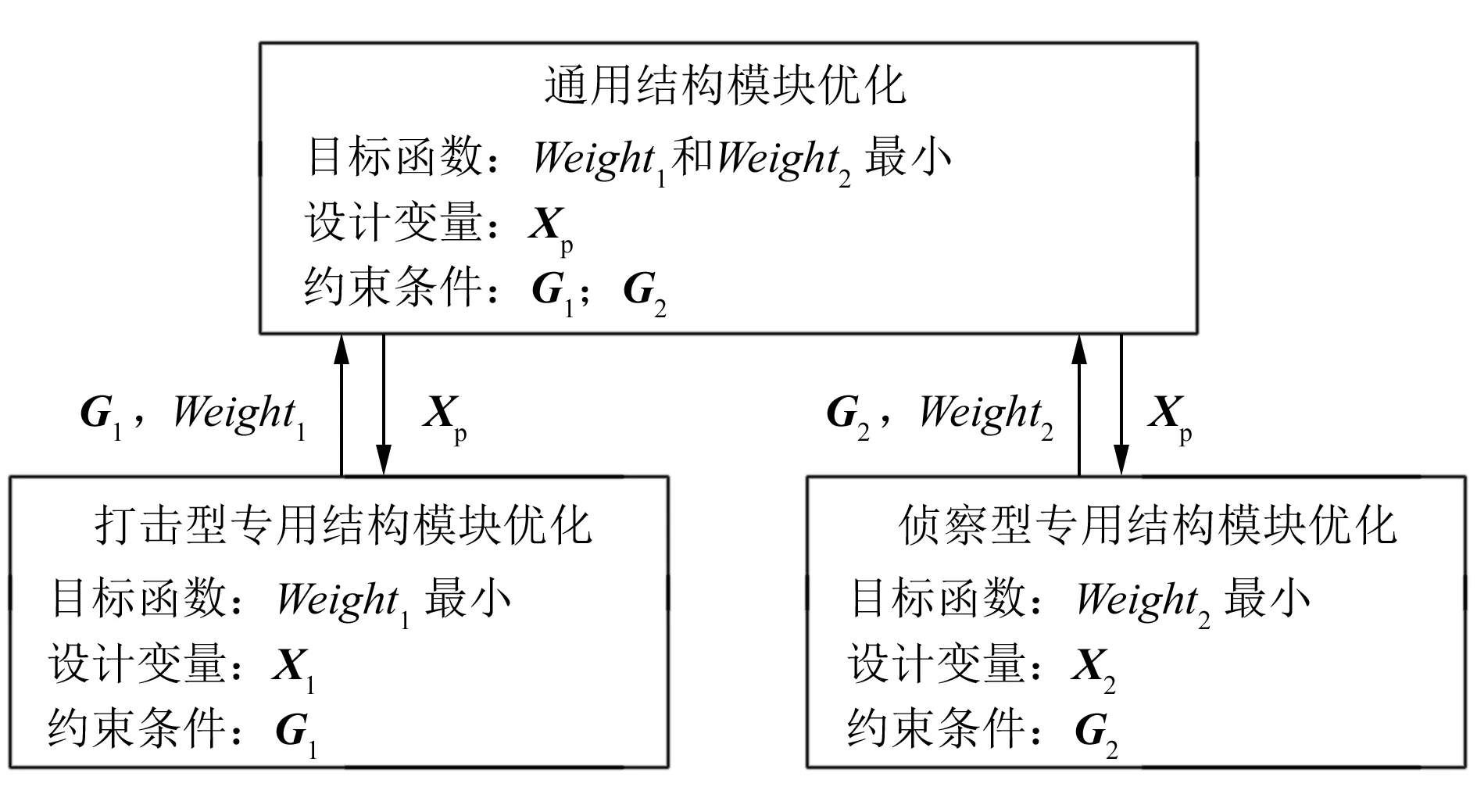
图10 二级优化的基本框架
3.1 优化方案的参数化表述
考虑通用性的无人机族结构优化问题用数学方法描述如下:
给定两种类型无人机气动外形参数:展弦比AR1和AR2、梢根比TR1和TR2、前缘后掠角Λ1和Λ2及机翼面积A1和A2。
目标函数:Weight1和Weight2最小。
设计变量:Xp,X1,X2。
约束条件:打击型无人机结构强度、刚度约束G1;侦察型无人机结构强度、刚度约束G2。
通用模块(系统级)结构优化的任务是寻找最佳的机身部件结构参数Xp,在满足两种类型无人机各自约束G1和G2的条件下,使得两种类型无人机结构质量尽量小。专用模块(子系统级)结构优化的任务是在给定通用模块参数Xp的情况下,寻找最佳的两种类型无人机机翼部件结构件尺寸参数X1和X2,使得该类型无人机的机体结构质量最轻,并将各自的目标函数值和约束函数值返回到系统级。通过通用模块层次和专用模块层次之间的多次迭代,最后得到两种类型无人机的机身部件(通用模块)和机翼部件(专用模块)参数的最佳组合。Xp包括机身蒙皮、机身框腹板和纵墙腹板的厚度,以及框和纵墙的缘条截面面积;X1包括打击型无人机过渡段和机翼蒙皮、翼梁腹板和翼肋腹板的厚度、梁和肋的缘条截面面积;X2包括侦察型无人机过渡段和机翼蒙皮、翼梁和翼肋腹板厚度,以及梁和肋的缘条截面面积。
应用多学科优化软件平台iSIGHT,实现飞机族机体结构分析和优化集成。运用二级优化方法可以更为直观地将优化模型通用模块和专用模块的设计变量分离开来,各专用模块之间相互独立、互不影响[12],但受到通用模块设计参数的约束影响。由于通用模块的优化目标是使两种类型的无人机机体结构质量尽量小,所以是一个多目标优化问题[13]。在优化计算中采用多目标遗传算法中的改进型非支配解排序遗传算法(non-dominated sorting genetic algorithm, NSGAⅡ)进行优化。
3.2 优化结果及分析
表3给出了单一优化和二级优化后的结构质量变化对比。对机身结构通用性优化后,打击型无人机结构质量为1.1367 t,侦察型无人机结构质量为1.410 1t。
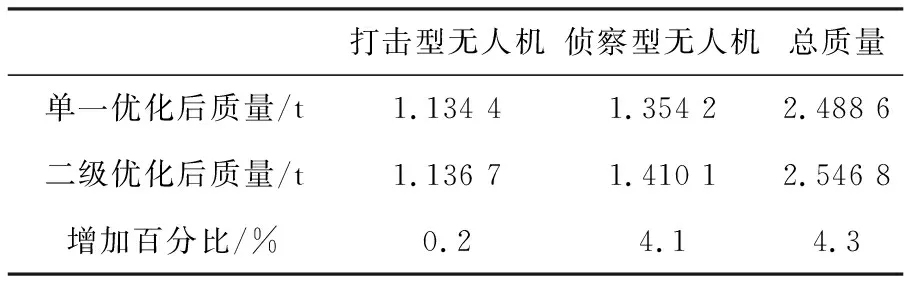
表3 两种机型两次优化质量对比
与传统单一构型无人机结构优化相比,无人机族策略导致两种构型无人机整体结构质量都有不同程度的增加,结构质量的增加意味着无人机飞行性能的降低。从表3可知,与不考虑机身结构通用性的单一构型优化结果相比,通用性策略导致无人机结构质量增加的程度是可以接受的。打击型无人机结构质量增加很小,侦察型无人机结构质量增加较大,这是因为打击型无人机气动载荷和过载系数较大,在同时满足两种类型无人机的应力和位移约束条件下,导致机身通用模块整体质量增加。但采用无人机族的设计策略,可以降低系列无人机的研发和制造成本,并为后期的使用维护等带来诸多便利。
4 结论
面向飞翼布局无人机方案设计,本文提出了一种飞翼布局无人机族机体结构优化设计方法,其特点如下:
1)采用飞翼结构布局的机身和机翼部件结构高度一体化,取消了机身、平尾和方向舵等结构,使飞机整体构成一个升力面,结构布置方案也与常规布局无人机有较大差别。
2)无人机族各型号之间共享通用部件,解决了通用模块和专用模块优化参数的定义问题以及不同类型无人机优化过程中各项参数的数据传递问题。
3)采用多学科多目标优化方法,成功地求解了飞翼布局飞机族结构优化设计问题,优化结果符合预期。