助力型人体下肢外骨骼研究综述
2020-07-14管小荣
李 杨,李 仲,管小荣,徐 诚
(1.泰州学院船舶与机电工程学院,江苏 泰州 225300)(2.南京理工大学机械工程学院,江苏 南京 210094)
从20世纪60年代起,世界范围内就有多个研究机构开始研究人体外骨骼系统。人体外骨骼系统的发展主要有两个分支:一种是用于辅助残疾人行走的医疗型人体外骨骼[1-2],此种人体外骨骼的研制相对而言较为简单,也取得了较多成果;另一种是用于增强正常人体负荷能力的助力型人体外骨骼,主要用于军事领域,目前正处在研究发展阶段,其样机离实际应用还存在较大差距,本文主要侧重于此种外骨骼的讨论。
随着军事技术的革新,单兵作为战争的主体,其携行需求越来越多。然而,士兵的负重能力有限,这严重制约了士兵的携行能力及机动能力[3]。20世纪60年代,美国通用电气公司就推出了哈迪曼(Hardiman) 穿戴式助力外骨骼样机[4]。但是受限于当时比较落后的科学技术,制造出来的外骨骼样机各方面性能都难以达到要求。在美国军方的支持下,1978年麻省理工学院(MIT)开始了助力型外骨骼的改进工作。美国五角大楼在2000年发出了单兵助力外骨骼的研制计划书,加州大学伯克利分校机器人和人体工程实验室、萨克斯公司等多家机构都开启了助力外骨骼的研究工作[5-7]。加州大学伯克利分校于2004年推出了其第一代助力外骨骼样机BLEEX[6-7]。随后, Kazerooni带领的团队[8-10]又相继开发了第二代助力外骨骼(ExoHiker和ExoClimber)和第三代助力外骨骼(HULC)。美国雷神(Raython)公司旗下的SARCOS公司也已经开发了两代XOS系列助力外骨骼样机,旨在提高士兵的负重行军速度,并且能够进行较方便地穿脱[11]。2011年,法国在国际军警保安器材展上展出了助力外骨骼HERCULE[12]。日本在助老和助残外骨骼方面的研究占据领先地位,日本筑波大学研发的HAL系列外骨骼样机已经于2017年12月17日获得美国食品和药物监督管理局批准[13-14]。新加坡南洋理工大学(NTU)Low教授等[15]开发了基于ZMP稳定判据的人体下肢助力外骨骼LEE(lower extremity exoskeleton)。较为人所熟知的,是在2014年巴西世界杯由巴西南里奥格兰德联邦大学展示的使用脑电波控制的外骨骼样机[16]。虽然国外在医疗外骨骼方面取得了较多成果,但助力外骨骼的研究则相对停滞,进展缓慢。
与国外类似,国内进行的助老和助残方面的医疗型人体外骨骼系统研究较为成熟,而助力型人体外骨骼方面的研究则进展仍然缓慢。2015年之前,中科院合肥智能机械研究所的余永、葛运建团队开发了电机驱动和电缸驱动两种外骨骼样机,并进行了外骨骼的信息采集及步态分析等研究[14]。浙江大学的陈鹰、杨灿军团队主要进行了医疗康复方面外骨骼的研究和开发[17]。海军航空工程学院的杨智勇、杨秀霞等[18-19]也对助力外骨骼进行了系统研究,并开发了多种驱动方式、多种控制方案的样机。哈尔滨工业大学的朱延河等[20]开发的助力外骨骼其每条腿具有6个自由度,可以实现对其中的膝关节自由度、髋关节屈伸自由度及髋关节内收外展自由度共3个自由度进行驱动。此外,上海交通大学[21]、南京理工大学[22-23]等高校都进行了一定的外骨骼理论及实验方面的研究。2015年之后,助力型外骨骼系统得到了军方的重大关注,于2015年举办了穿戴式外骨骼助力装备挑战赛。中国兵器装备集团研究所[24-25]、总后军需装备研究所、哈尔滨工业大学[20]、海军航空工程学院[26]等国内多家研究机构研制的15套外骨骼助力装置样机参与比赛。由比赛过程来看,绝大部分外骨骼样机的最大问题都出在人体与外骨骼的协调性上。而取得较好成绩的中国兵器装备集团研究所及海军航空工程学院研制的样机只对外骨骼的膝关节进行了驱动,因而能够大大降低控制难度,取得了相对较好的人机协调性,但可想而知由于驱动关节较少导致其助力效果并不优越。总体而言,国内的助力型外骨骼装置研究已经取得一定成果,并研制出了不少的外骨骼样机,但是国内的助力型外骨骼样机离实用还有较大距离。
1 外骨骼系统总体分析
与人体的骨骼、肌肉、大脑、神经相对应,助力型人体外骨骼系统包括机械系统、驱动系统、控制系统、感知系统,如图1所示。控制系统与人大脑的作用类似,负责信息处理和控制命令的发出;驱动系统与人体的肌肉类似,负责控制命令的执行;机械系统与人体骨骼类似,负责载荷的承载和传递;感知系统与人体神经类似,负责信息的采集与感知。4个分系统协调动作,在人体负重前行时,外骨骼能够及时向穿戴者提供助力,降低能量消耗[22]。

图1 外骨骼与人体类比示意图
2 机械系统分析
机械系统是外骨骼4个子系统中最基础的部分,它一方面是其他分系统的安装平台,另一方面用于承载整个外骨骼系统的总体重力。
由于助力型人体外骨骼需要穿戴于人体,因此在外骨骼结构上必然会采用一些拟人化设计。故而外骨骼机械系统的设计必须建立在人体下肢运动生物力学分析的基础上,其中外骨骼结构尺寸分析、关节自由度分析及驱动自由度选择等研究内容是外骨骼机械系统设计分析的主要工作。
2.1 结构尺寸分析
人体质量及转动惯量等惯性参数对外骨骼的设计影响不大,影响外骨骼结构尺寸设计的是长度与围度参数。人体各部分肢体的长度与身高大约成一定的比例关系(如图2所示)[26-27]。对于身高在160~180 cm的不同人体,大腿、小腿的差异大约为6 cm[28]。在设计外骨骼时需要考虑其对以上不同身高体重的人体的适应性,因此最好设计具有可以调节大腿长度、小腿长度及腰部宽度的外骨骼结构[29]。
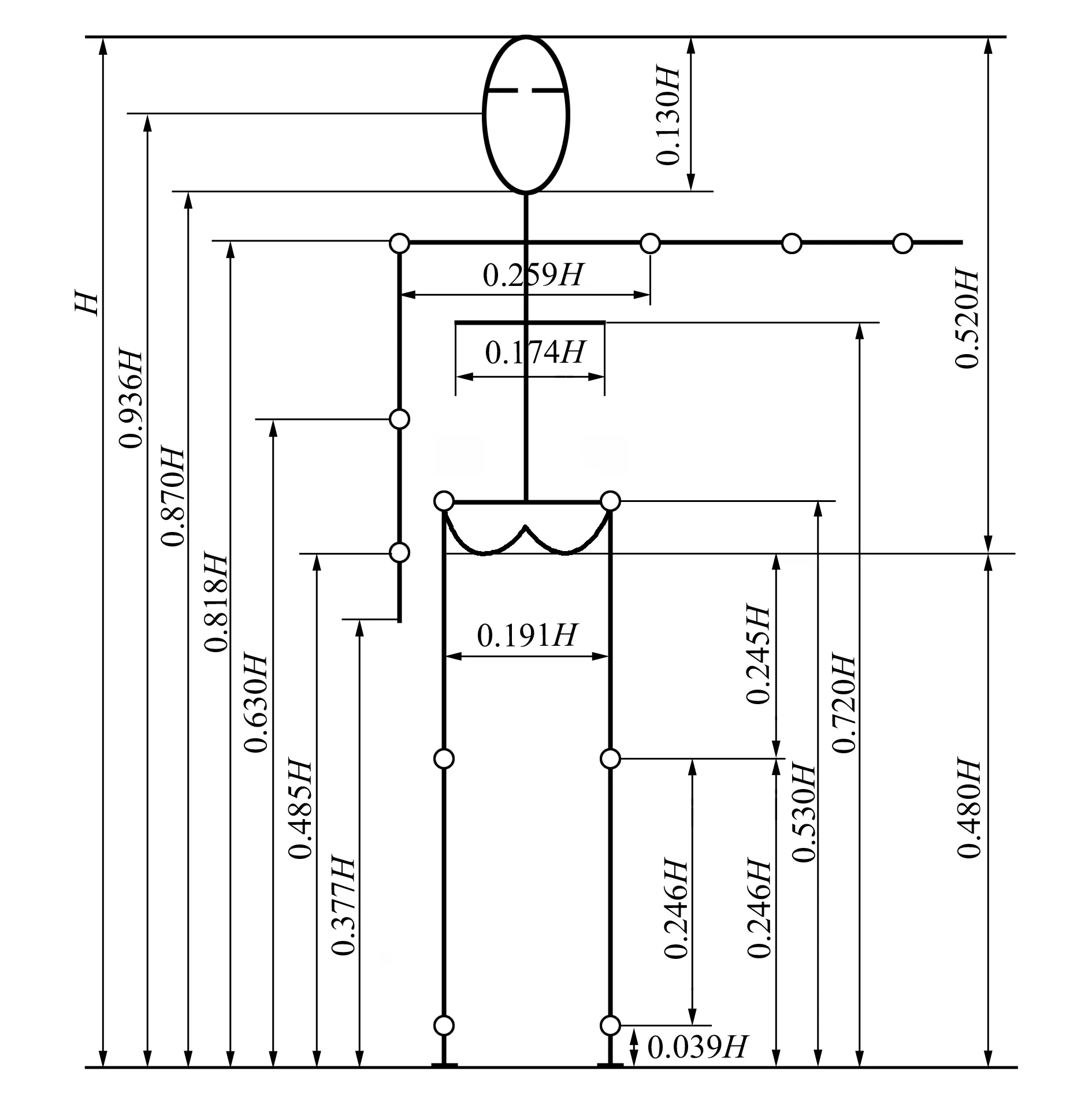
图2 人肢体与身高关系图
2.2 关节自由度分析
人体下肢运动是由髋关节、膝关节及踝关节连接的盆骨、大腿、小腿及脚的运动实现的[30]。常用的人体坐标系定义如图3所示,而人体在直立状态下,关节绕冠状轴的旋转,称作“屈伸”;绕矢状轴的旋转称作“内收/外展”;绕垂直轴的旋转称作“内旋/外旋”[6,25]。人体髋关节和踝关节可以当作3自由度的球副,而膝关节类似于单自由度的转动副。由此可知,人体下肢起主要驱动作用的自由度为每条腿7个,共14个自由度。
机械系统需要穿戴于人体,因此人体舒适性是外骨骼机械结构设计的重中之重,因为离开人体舒适性,外骨骼即使能够起到助力效果也没有意义。从仿生学来讲,机械结构的自由度设计如果跟人体完全一致,那么外骨骼的动作就可以做到与穿戴者相互协调,然而机械结构所设计的自由度越少,外骨骼的运动控制将会越简便,所以简便的控制方案和较好的人体舒适性是不可兼得的。因此,不同研究者根据不同需求所设计的下肢外骨骼的关节自由度不尽相同。

图3 人体坐标系示意图
虽然不同外骨骼样机选择的自由度不同,但固定关节自由度的运动范围却基本相似,大致范围见表1[28]。在进行外骨骼结构设计时,应该在驱动装置运动范围许可的情况下尽量满足以上人体的运动自由度范围。
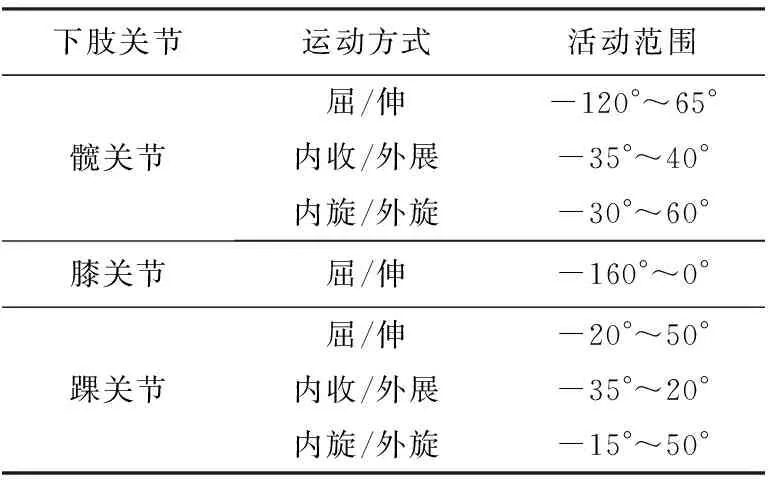
表1 人体下肢各主要关节运动范围
2.3 驱动自由度的选择
人体运动前进的动力主要由下肢的关节屈伸自由度提供,而内收/外展自由度主要用于保持人体平衡,内旋/外旋主要用于实现人体的转体、行走时转弯。人体在行走时,大部分能量是由驱动髋关节屈伸、膝关节屈伸及踝关节屈伸的肌肉提供的,其中膝关节耗能最多。
选择驱动哪些关节自由度一直是外骨骼研究者所要重点考虑的问题,不同研究者的选择各有不同。目前的主流外骨骼样机只选择针对外骨骼屈伸关节自由度中的某个或某些进行驱动,因为哪怕只驱动一个外骨骼关节的自由度,外骨骼也能多多少少实现一定的助力效果。
2.4 人体异构型外骨骼结构
绝大多数研究者在进行外骨骼结构设计时都会选择尽量与人体类似的结构,然而也存在一些人体异构型的外骨骼设计。
上海交通大学的高峰老师团队设计了一种剪刀型腿部结构如图4所示。这种结构新奇巧妙,大大颠覆了大家对外骨骼结构的传统观念[21]。
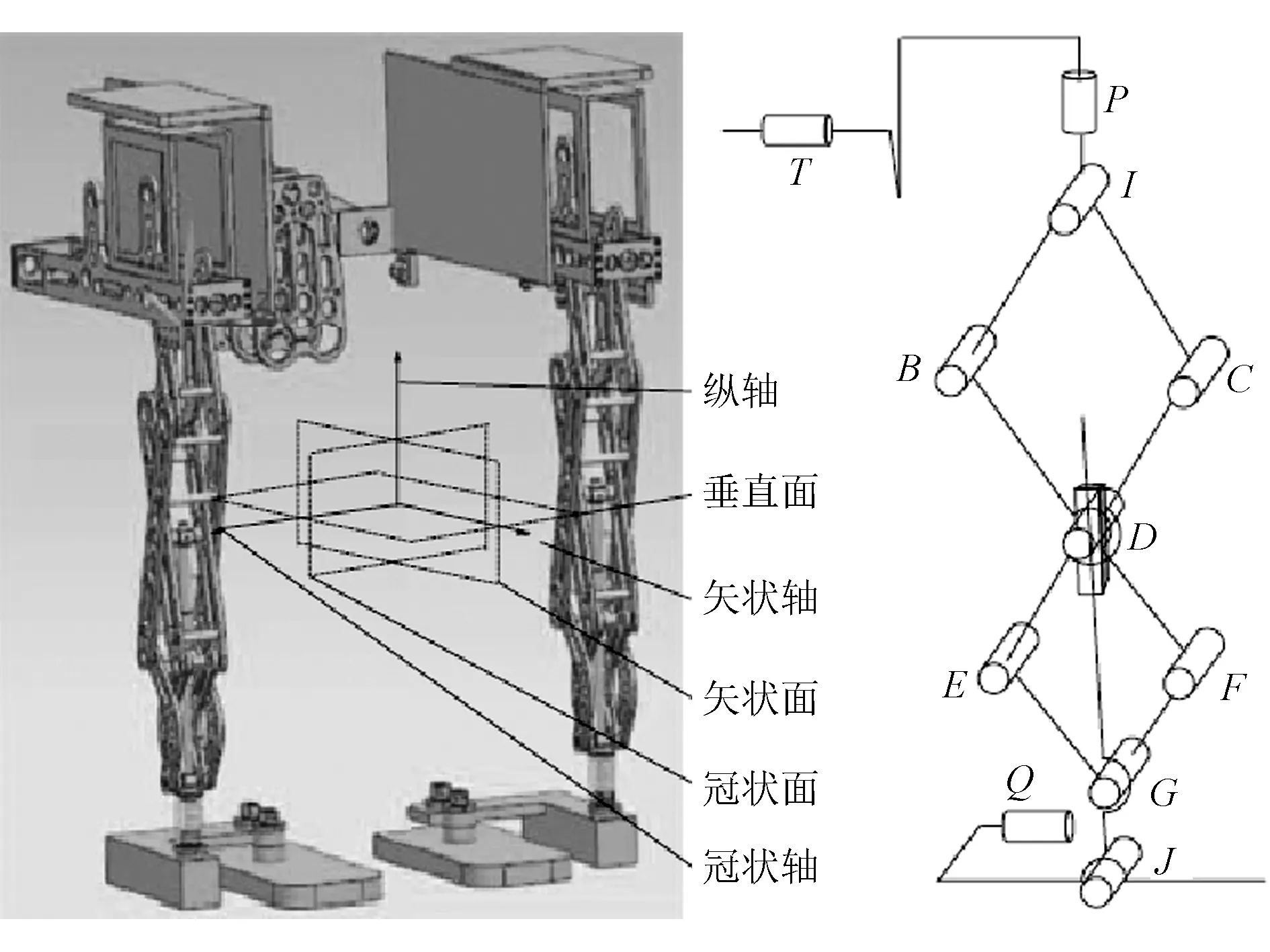
图4 剪刀型下肢外骨骼结构示意图
南京理工大学徐诚老师的团队设计了一种平动膝关节的外骨骼结构,并使用多体动力学软件ADAMS进行仿真,分析了其结构在背负100 kg负载时能够降低58.6%左右的能量消耗,起到一定助力效果[23]。
从外骨骼的本质而言,其只是一个帮助人体背负负荷的机电系统。由于外骨骼需要穿戴于人体从而使得绝大多数研究者将其视为仿人形机器人,因而很多研究者会带入一些仿人形机器人研究设计的固定思维。然而,如以上人体异构型外骨骼结构的新奇设计也不失为外骨骼探索的一种好思路。
3 驱动系统分析
3.1 驱动系统要求
助力型人体外骨骼主要用于为士兵提供助力,由于士兵在行军时需要背负大量物资,因此外骨骼驱动系统的功率要足够大。外骨骼不仅需要为士兵提供助力,还需要支撑其自身的重力,因此外骨骼的所有分系统自重都应该尽量小。此外,士兵行军的环境较为恶劣,因此外骨骼的驱动系统需要具有较强的环境适应性,否则外骨骼的驱动系统在恶劣的环境下极有可能失效,驱动系统一旦失效,外骨骼不仅起不到助力效果,还会妨碍士兵的正常行走[22]。
3.2 驱动器选择
就目前工业中广泛采用的驱动系统而言,与仿人机器人相类似,外骨骼的关节驱动方式主要有伺服电机驱动、液压驱动、气缸驱动、气动肌肉驱动等方式。
1)伺服电机驱动。由于市场上销售的高性能伺服电机大多是高转速、低扭矩,因此为了实现低转速、高扭矩,目前谐波减速机构在仿人机器人上得到了广泛应用,其不单体积小、质量小,而且可按照几乎没有间隙的目标值进行控制[31]。对于伺服电机驱动,最直接的方法是将电机减速器直接安装在外骨骼转动关节处,这样的布局简单方便,但是会增大关节转动惯量。此外,还有使用电机减速器配合同步带、齿轮、滚珠丝杠以及拉索等方法来实现对外骨骼关节的驱动。这些方法相对电机减速器直接驱动的方法而言,布局更加灵活,但是传递效率略有下降、传动精度略有降低。
2)液压驱动。液压驱动的特点是转矩与惯性比大(单位质量的输出功率高),液压驱动器有平动型(液压缸)和旋转型(液压马达)两种。液压驱动方式的优点是输出功率大,不需要减速机构,可承受机械冲击和损伤的能力强,力保持性可靠。缺点是液压系统容易漏油,另外还必须配置液压源[32]。
3)气缸驱动。气缸驱动与液压缸驱动较为类似,并且传递介质可以直接使用空气,因此相对于液压缸来讲,要轻便许多并且清洁无污染。但是由于气体的可压缩性,气缸的运行平稳性、控制精确性及控制响应速度都较差[31],并且气缸驱动噪声也比较大。
4)气动肌肉驱动。气动肌肉是一种具有类似人类肌肉输出特性的柔性执行器,它是根据人类肌肉的运动原理设计而成。与气缸类似,气动肌肉轻便并且清洁无污染,气动肌肉还具有比气缸更大的功率体积比及功率质量比。
气缸的控制精度及响应速度差是其在助力型人体外骨骼中应用较少的原因。由于助力型人体外骨骼需要穿戴于人体,因此需要较为紧凑的布局,而且不能影响人体的运动。气动肌肉会使关节结构非常复杂,而且每个关节需要两块气动肌肉,这会使结构更加庞大,因此气动肌肉在助力型人体外骨骼中的应用也较少。早期的外骨骼研究者为了高输出功率,大多选择液压驱动,但漏油、需要液压源等缺点导致现在的外骨骼主流设计者不再选择此种驱动方式[26]。伺服电机配合谐波减速器、滚柱丝杠等装置也能实现较高的输出功率,是目前应用最多的驱动方式。
4 控制系统分析
与传统机器人类似,人体外骨骼系统是多输入多输出的非线性系统,它具有时变、强耦合和非线性的动力学特性,其控制十分复杂。而外骨骼系统的操作者处于控制回路中,即人在回路中(man in loop)[6-7]。因此,作为一个人机耦合系统,外骨骼的控制需要使人和机器能够协调运行。下肢外骨骼常用的控制策略可以分为如下几种,而在实际的外骨骼控制方案设计中,往往是多种控制策略相结合使用。
4.1 机器人位置控制
在外骨骼研究中有所应用的操作者控制、预编程控制及ZMP(zero moment point,零力矩点)控制可以归纳于传统机器人的位置(轨迹)控制范畴。位置(轨迹)控制在医疗型外骨骼中得到了广泛的应用并获得了较大成功,但由于位置控制存在难以与正常人体行走相协调匹配的缺点,并且控制效果并不优越。
1)操作者控制。通过手柄、按钮开关等发布指令对外骨骼的运动进行控制,需要操作者不停发布指令。因此不适用于助力型人体外骨骼,主要用于基于康复目的有外部能源驱动的步态矫正装置[33-34]
2)预编程控制。由于预先编好的程序并不能适应正常人体行走过程的灵活多变,因此预编程控制一般运用于设计下肢残疾患者的康复装置[33]。并且下肢残疾患者还需要额外使用辅助装置来保持稳定,因而能够实现的运动形式也十分有限[35]。
3)ZMP控制。ZMP控制是传统机器人经常采用的控制方法,在机器人领域有着广泛的应用,其在医疗型外骨骼方面有较多应用,而在助力型外骨骼方面则应用较少。南洋理工大学的Liu等是为数不多的将ZMP控制方法应用于助力型外骨骼的学者[36]。然而ZMP控制方法实现的机器人行走步态是一种静态行走,而静态行走与人体的行走方式相差较大,这势必导致人体在穿戴外骨骼行走时的不自然与不协调。
4.2 人体运动轨迹跟踪控制
通过一定的方法实时检测分析人体关节的运动轨迹,从而实时控制外骨骼的关节实现与人体相一致的运动,这样的控制方式可以称为人体运动轨迹跟踪控制,这应该是助力型外骨骼最直观的控制方法。这种控制方法可以很好地实现外骨骼运动与人体运动的协调一致,但这种方法往往需要在人体添加一定的传感器,极大地影响了助力型外骨骼的人体舒适性,也会导致外骨骼的穿戴极为不便,这往往是绝大多数助力型外骨骼研究者所不能接受的。因此这种控制方法虽然非常直观方便,但是在助力型外骨骼中应用较少。
1)肌电控制。肌电控制就是通过实时检测穿戴者人体的肌电信号(electromyograms, EMG),从而判断人体的运动意图,进而实现对外骨骼运动的控制,使外骨骼与人体的运动能够协调一致。将肌电控制方案成功应用于外骨骼的典型样机是日本的HAL,其还对肌肉的黏弹性特性进行了深入分析,HAL能够使穿戴者感觉运动起来非常舒适[13]。但是在激烈运动时,肌电传感器容易脱落、易位,长时间运动后人体出汗会影响传感器的测量;EMG信号中往往包含很强烈的噪声,必须经过额外的处理才能应用于系统中;传感器每次都要贴到人体表面,使用不便。
2)脑波控制。与肌电控制相类似,脑波控制主要通过实时检测穿戴者的脑波信息,从而判断穿戴者的运动意图,实现相应的运动。此种控制方法较为先进,在外骨骼中应用较少,如在2014年巴西世界杯上,巴西南里奥格兰德联邦大学就对该类型的外骨骼样机进行了展示[16],用于帮助残疾患者实现简单的动作。归根到底脑波控制策略只是对穿戴者运动意图进行判断,还需结合传统机器人的位置控制方法对其驱动器进行轨迹规划。
3)主从控制。主从控制一般用于远程机器人操作系统,目的是令远方的机器模拟操作者的动作。为了能连续不断地捕获人体的运动,操作者必须穿戴一套主外骨骼装置。这种方法的目标是通过反馈,控制机器的关节角度跟踪相应的人体的关节角度。这种控制方法不仅要控制终端的位置和方向,而且要控制整个装置的姿态[26,33]。这就要求在系统设计时,在从外骨骼的内部预留人和主外骨骼的活动空间,使得系统的设计变得相当复杂,适用于医疗辅助外骨骼,而与助力型人体外骨骼系统理念不大相符。
4)足底压力与人体运动步态映射控制。此种控制方式的主要原理是:通过人体运动捕捉仪器捕捉人体在正常行走过程中的行走步态(主要是各关节角度),同步使用足底压力鞋垫捕捉人体在正常行走过程中的足底压力曲线(双峰曲线),并建立足底压力曲线与人体行走步态的映射关系。实时控制时通过检测足底压力并检索数据库足底压力特征与行走步态特征的映射关系,进而通过检索到的行走步态对外骨骼关节角度进行轨迹规划控制。韩国汉阳大学的研究是此种控制策略研究的最典型代表[37],并取得了一定的成果。国内众多研究者都对这种控制方式有过一定的尝试,主要存在足底压力捕捉与人体行走步态的同步问题,又由于人体行走步态信号及足底压力信号较为杂乱无章,至今未能建立较好的相应的映射关系。但此种控制方法仍不失为一种可以继续努力实现的可行路径。
4.3 灵敏度放大控制
助力型外骨骼的控制策略至今一直是其研究的最大难点,Berkeley大学在外骨骼研究领域是全球领先的,灵敏度放大控制器(sensitivity amplification controller)就是为其BLEEX助力型人体外骨骼专门设计的一种独特的控制方法,此控制方法以前从未应用于任何传统机器人系统。该方法不需要在人机之间安装任何传感器,同时又能控制外骨骼跟随操作者的运动[4-5]。该方法通过数学模型进行外骨骼的逆向动力学求解,从而预判出外骨骼的运动意图。然而像外骨骼这样的多自由度、多刚体非线性系统,它的数学模型的建立需要花费大量的精力并且难以精确。另外,在此控制方法下,外骨骼无法区分外部干扰和人体运动意图,外部干扰会使外骨骼的运动极度不稳定。因此,为了既能够响应低频率的人体正常行走动作,又能够响应高频率的人体抵抗干扰的动作,外骨骼系统需要一个很宽的控制带宽[7]。
4.4 机器人力控制
机器人在受限空间运动的控制与在自由空间运动的控制相比,主要是增加了对其作用端与外界接触作用力(包括力矩)的控制要求,因而受限运动的控制一般称为力控制。由于在受限空间,改变运动轨线的同时会改变作用力的大小,而控制既要求机器人沿一定的轨线运动又要求作用力在一定的范围内,这使两者成为一个矛盾体的两个方面,控制时必须兼而顾之。目前实现力控制的方法一般有两种:一种是简单的采用轨线控制的方法,间接地达到控制力的目的,但此方法需要极高的轨线控制精度,经济代价较高;另一种是直接的力控制方法,它是在轨线控制的基础上给机器人提供力或触觉等传感器,使机器人在受限方向上运动时能检测到与外界间的作用力。进而控制器对外界施加的作用力干扰不是像常规位置控制器那样对其抵抗或消除,而是进行一定程度的“妥协”即顺应或依从,从而以一定的位置偏差为代价来满足力控制的要求,保证作用力为恒值或在一定的范围内变化[38]。
近几年,机器人力控制方法在外骨骼中的应用引起了不少学者的关注。最著名的是海军航空工程学院的杨智勇、顾文锦、张静、归丽华等学者,他们依次对将传统机器人控制策略中的直接力控制、基于位置内环的力控制及阻抗控制引入到外骨骼控制方法的设计中进行了尝试[26]。其设计的这些力控制策略相较于灵敏度控制策略,能够通过添加在人与外骨骼之间的多维力/力矩传感器实时分析判断自身的控制效果并进行调整。但是相较于灵敏度放大控制策略,这些控制策略需要更加复杂的传感系统。而且在这些控制策略所设计的控制器中,外骨骼的雅可比矩阵及骨骼服的静态重力补偿力矩仍然都得依赖于精确的外骨骼数学模型。此外,基于位置内环的力控制及阻抗控制都需要提供参考位置信号,这就遇到了外骨骼运动轨迹规划的问题。而助力型人体外骨骼与传统机器人的不同之处,在于其运动轨迹需要完全依从于穿戴者的人体运动,因而人体运动的随意性导致外骨骼的轨迹规划异常困难。
中国科学技术大学的余永、葛运建等也进行了将传统的力矩补偿控制方法应用于助力外骨骼的研究[14],他们不仅进行了详细的传感系统及控制硬件设计,还设计了应用于外骨骼摆动腿的简单实验。
哈尔滨工业大学的朱延河等[20]开发的助力外骨骼样机也使用了类似的控制方法,但从其在2015年穿戴式外骨骼主力装备挑战赛上的表现来看,其人机协调性的控制效果并不好,并且对不同地形的适应情况也不令人满意。究其原因,还是传统机器人的力控制方法仍然需要依赖于机器人的轨迹规划,而人体行走的随意性导致外骨骼的轨迹规划较为困难。
4.5 控制策略综合分析
综合而言,各种控制策略各有优缺点。其中值得关注的有几条重要信息:1)人体运动轨迹跟踪控制策略可以将许多人体外骨骼控制的难题(轨迹规划、平衡稳定性等)交给人体实现,而外骨骼只需实现实时跟踪人体运动这一个目标;2)灵敏度放大控制,为背负负载提供了一种新思路,即外骨骼提供较大动力,人体仍需提供较小动力,外骨骼提供的动力是人体提供动力的一定倍数;3)机器人力控制方法应用于外骨骼中,将人体看作外骨骼的工作环境,通过实时保持外骨骼与人体较小的交互作用力从而实现较好的人机协调性。若是能将以上几条控制策略的优点集合到同一外骨骼样机的控制方案中,想必能取得较为优越的控制效果。
5 感知系统分析
助力型外骨骼感知系统主要有两个作用:1)用于获取相应控制策略所需的相关信息,这也是感知系统设计的首要目的;2)用于非控制目的(例如监控外骨骼运动状态用于分析或者仿真目的)的感知系统设计。因此根据不同研究者的控制策略及需求实现的感知系统的布局及传感器的选择千差万别,然而外骨骼常用的传感器种类却是如下为数不多的几种。
5.1 关节状态检测传感器
常用的关节角度传感器是电位计、光电旋转编码器及线性编码器,尤其是光电编码器,在很多场合它已与伺服电机配置在一起出售。关节角度传感器既可以安装在电机端,也可以安装在关节端。角加速度传感器常常用于检测外骨骼的关节角加速度,一般不会通过传感器直接检测外骨骼关节的角速度,而是通过角度传感器进行推测[32]。这类传感器是在外骨骼设计中应用最多的传感器,在大多数外骨骼样机中多多少少都有应用[24,26,30]。
5.2 躯干姿势检测传感器
与仿人机器人类似,外骨骼一般采用加速度计和陀螺仪等惯性敏感元件来实现机器人的姿态信息检测。传统的加速度计和陀螺仪是机械式的,优点是精度高,缺点是成本高、尺寸大、质量大、可靠性差。随着微机电系统(MEMS)的迅速发展,MEMS加速度计和MEMS陀螺仪已比较成熟,成本低、尺寸小、质量小、可靠性高,测量精度也在不断提高。利用惯性敏感元件测量结构相对于惯性空间的线运动和角运动参数,再利用牛顿力学定律推算出姿态方位、速度、位置等参数,这种方式是一种完全自主式的姿态检测系统,不易受到干扰。除此之外,倾角仪在需要检测外骨骼躯干与地面绝对角度时,也会有一定的应用。
5.3 人机交互信息检测传感器
外骨骼设计中常常需要测量人与外骨骼交互作用力或者外骨骼与地面间的反力/力矩等信息,常用的传感器有拉压力传感器、称重传感器、力矩传感器等,在有多个方向力/力矩检测需求时,往往会选用多维力/力矩传感器。片式足底压力分布传感器常常应用于检测穿戴外骨骼时人体足底的压力分布情况,用于辨识人体运动相位。此外接触开关也会应用于分辨外骨骼的支撑腿及摆动腿[24,26]。
5.4 人体生物信息检测传感器
日本筑波大学、佐贺大学等机构设计的外骨骼采用了大量的肌电传感器检测人体相应位置实时的肌电信息,在残疾人医疗方面取得了较大成功[13]。在2014年巴西世界杯上,由巴西南里奥格兰德联邦大学展示的外骨骼样机首先使用脑电波传感器来判断人的运动意图,再通过传统机器人的位置控制方法帮助残疾人实现简单运动[16]。在外骨骼的设计中,往往会避免安装传感器在人体上,因此检测人体生物信息的传感器在外骨骼样机中的应用并不多。
6 结束语
本文将助力型人体下肢外骨骼系统分为机械系统、驱动系统、控制系统、感知系统4个子系统,并与全球著名的外骨骼样机及相关文献相结合,对以上4个子系统中的关键元素进行了分类总结与分析。机械系统方面:绝大多数研究者在尺寸结构设计、关节自由度设计、驱动自由度选择方面都较为相似、固定,然而为数不多的一些人体异构型外骨骼结构不失为探索创新的好范例。驱动系统方面:伺服电机与液压装置是以往外骨骼选用最多的两种驱动器,不过目前的外骨骼主流设计者越来越倾向于不选择液压驱动方式。控制系统方面:在以往外骨骼系统中有过研究应用的各种控制策略各有优缺点,一个优越的控制方法正是目前外骨骼发展的最大瓶颈,一种能够结合人体运动轨迹跟踪控制、灵敏度放大控制及机器人力控制这几种控制策略优点的控制方案不失为值得探索的目标。感知系统方面:具体的感知系统设计及布局因人而异、千差万别,但各研究者所运用到的传感器种类并不多,将新型传感器应用于外骨骼中的探索也许会给外骨骼的研究带来不一样的局面。总体而言,目前人体下肢外骨骼的研究已成系统,也较为全面,一种人机协调性好、助力效果好、平衡稳定性优越及环境适应性强的控制方案的探索与设计是外骨骼目前所要实现的首要目标。