中央空调管道清洁机器人机构设计
2020-07-14谷忠朋黄添彪张玉莲
谷忠朋,黄添彪,张玉莲
(浙江海洋大学东海科学技术学院,浙江 舟山 316000)
随着经济的快速发展,人们对室内中央空调带来的疾病隐患有了相当深刻的认识。卫生部对公共场所集中空调通风系统卫生有着严格的法律条文,国内有超过500万个不同种类的中央空调需要清洗保养,这些中央空调大部分长期运行却从未清洗过,存在较大的安全隐患,而且此类空调的数量每年以10%的速度递增,因此开发一套对空调管道进行彻底清洗的自动化设备十分必要。对于部分发达国家, 如美国和日本,使用机器人对中央空调进行清洗服务已有几十年的研究历程,已拥有技术比较成熟的空调风管清洁机器人。国内该项技术应用较少,广州必卓保科技有限公司和天津华贞环保科技有限公司虽然已经意识到中央空调风管清扫的重要性,但主要设备大部分依赖进口,设备费用高昂使得运营成本增加、收益降低[1-3]。
国内中央空调管道式通风系统的清洗存在的问题有:不能有效清洗截面高度在300 mm以下的管道;不能有效清洗竖直管道;机器人在管道内越过障碍比较困难;当管道截面变化时,刷子不能始终紧贴壁面,清扫效率低[4]。国内空调管道清洗市场的发展具有巨大潜力,研究与开发中央空调清洁机器人具有很好的前景和价值。
1 整体设计方案
在全面了解国外典型空调清扫机器人的基础上,本文设计了一套新型的清洁机器人,其整体结构和工作原理如图1所示,机器人在管道中检查和清理污垢过程如下:首先将气囊塞入管道内,并进行充气,使得气囊堵住等待清扫管道的两端,将需要清扫的区域隔离出来,防止清扫中的灰尘向其他区域飘散;管道内壁的灰尘掉落后,使用大型集尘净化器吸收管内被扫落的灰尘和杂质;最后使用摄像传感装置查看管内的清洗情况。该清洁机器人系统的特点和优势如下:

图1 清洁机器人结构和工作原理
1)整套设备小巧轻便,便于搬运携带;采用履带行走方式,前进、后退自如;导向装置使机器人遇到障碍时能够自动转向;工作时可以通过监控设备实时查看管道内污垢附着情况,从而实现清扫过程的远距离遥控。
2)除污彻底化。系统严格按照中央管道空调清洗协会提出的生产标准进行设计,由气动马达带动毛刷转动彻底清扫管道边角和顶部的灰尘,并且可以使用气动马达将支撑杆抬高或降低, 再利用大型集尘净化装置把管道内扫落的灰尘高效地收集,然后进行处理。
3)可视范围广。清扫过程中,可通过摄像传感装置查看管道清洁状况,并进行相应的操作。
2 中央空调管道清洁机器人机构设计
本文设计的中央空调管道清扫机器人根据各种空调管道的尺寸及管道内环境要求,其长度范围为295~775 mm,宽度范围为300~800 mm,高度范围为140~400 mm,移动速度为66.67~200.00 mm/s,具有很强的爬升能力,在壁厚为2 mm的管内,爬升角度大于40°,最大行走距离160 m。图2为机器人的组成结构, 主要由监视装置、行走机构、清扫机构3个部分组成,拟似爬行设计如图3所示。
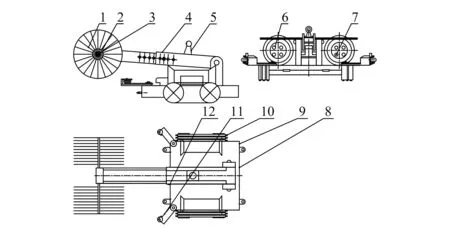
1—洗刷头;2,4—支臂;3—气动马达;5—摄像装置;6—照明装置;
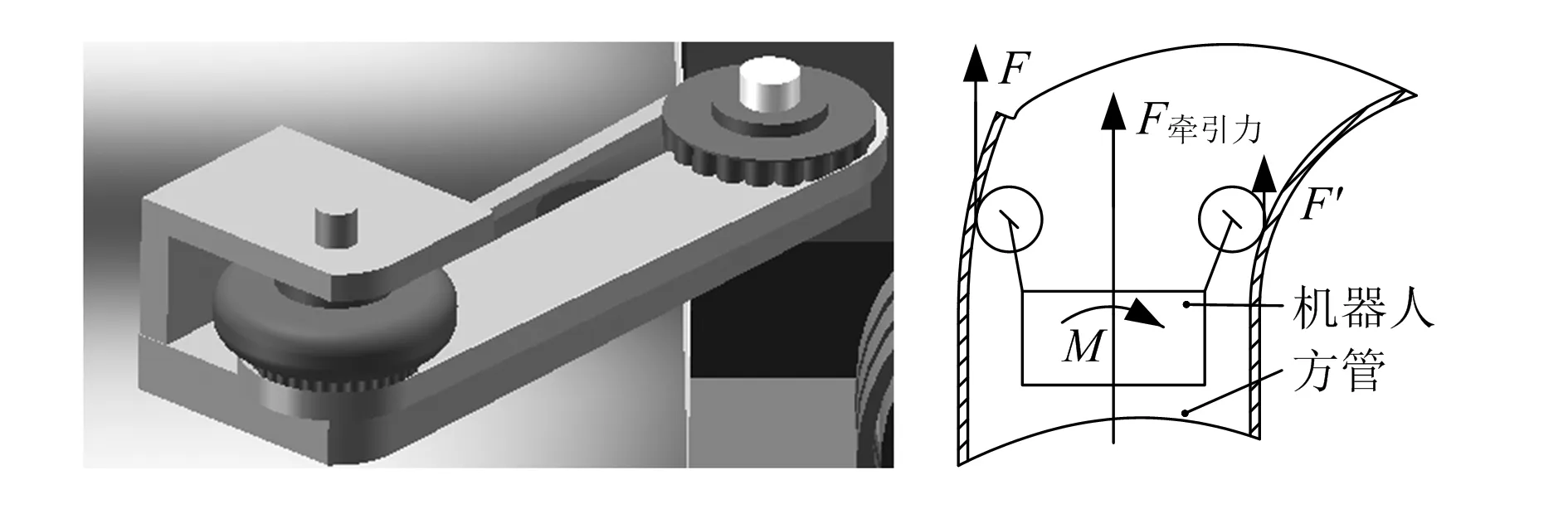
图3 右转弯时机器人受力分析
2.1 行走与转向机构
该清扫机器人转向机构的设计有两套方案。第一套方案是模拟汽车的差速转向装置,这种方式使汽车更容易转弯[5]。然而,考虑到这将使整体结构更加复杂并需要增大质量,将带来一系列问题,更主要的是空调风道无法承受太大的重力和撞击力,所以需要机器人在风道内慢速行驶,并且自身质量不能太大,因而该方案不符合使用要求。第二套方案如图3所示,在机器人前部的左右两侧各安装一个导轮,为保障机器人在管道中前进时能够自如地调整方向,导轮装置起着重要的调节作用。在清洁之前,通过改变支撑臂上的螺钉来设置两个引导轮的横向距离,使得机器人位于管道中心位置时,确保引导轮距管壁两侧约20 mm。在清洁过程中,两个导轮以相同的速度和相反的方向旋转(左导轮逆时针旋转,右导轮顺时针旋转),其旋转速度略大于机器人的前进速度。如图3所示,如果左引导轮撞击管道的左壁,则机器人将在引导轮与左壁之间的切向摩擦力F的作用下向管道中心移动,并且产生顺时针方向转矩M,使得机器人向右转向。同理,右导轮碰撞右壁时产生向左的力矩,致使机器人左转。
2.2 监视控制器
如图4所示,监视控制器需要安装一个小型摄像头,并固定在机器人的可调节臂上,在操作期间通过不断调整相机的视角观察管道内复杂的环境。目前主流摄像头所采用的感光元件主要有2种:1)CCD(charge coupled device,电荷耦合器件)组件,具有成像清晰、抗抖动、体积小等优点,但价格略高[6]。2)CMOS(complementary metal oxide semiconductor,互补金属氧化物半导体),是一种低质量成像的摄像产品,在光线较暗的环境下工作时必须另外搭配光源,但其具有价格低、响应性低、功耗低等优点,并且成像效果能够满足空调管道清扫的成像需求。从成像要求和成本方面考虑,该装置选用CMOS系列下型号为GS-388的彩色数码摄像机,并另外安装了照明设备。
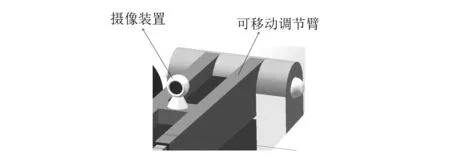
图4 清洁机器人监视控制器
2.3 清扫机构
机器人在工作时主要使用旋转刷来完成清扫,因此旋转刷装置是清扫机构最为重要的部件[7]。旋转刷由气动马达驱动,适应不同尺寸的管道与气动马达相连的刷杆,设计为可调节式结构,通过对刷干螺栓的调节可以改变其长度。可拆卸式旋转刷头结构可以安装不同规格的旋转刷,以满足不同的清扫环境,清扫机构与气动马达的联接机构可以完成俯仰调整,保证机器人在管道中方便灵活地运用旋转刷,将空调管道内的死角以及顶板的污垢全部扫落。清扫机构通过电机带动旋转管进行转动,同时通气管对尼龙砂进行均匀吹动,使尼龙砂在通风管道内表面进行均匀摩擦,在照明装置和导向装置帮助下,机器人可以方便地在复杂的管道内壁行走和转向,有助于该装置在移动过程中灵活运行,更好地配合清扫机构彻底清理空调管道内部各种复杂结构。清洁机器人清扫机构如图5所示。
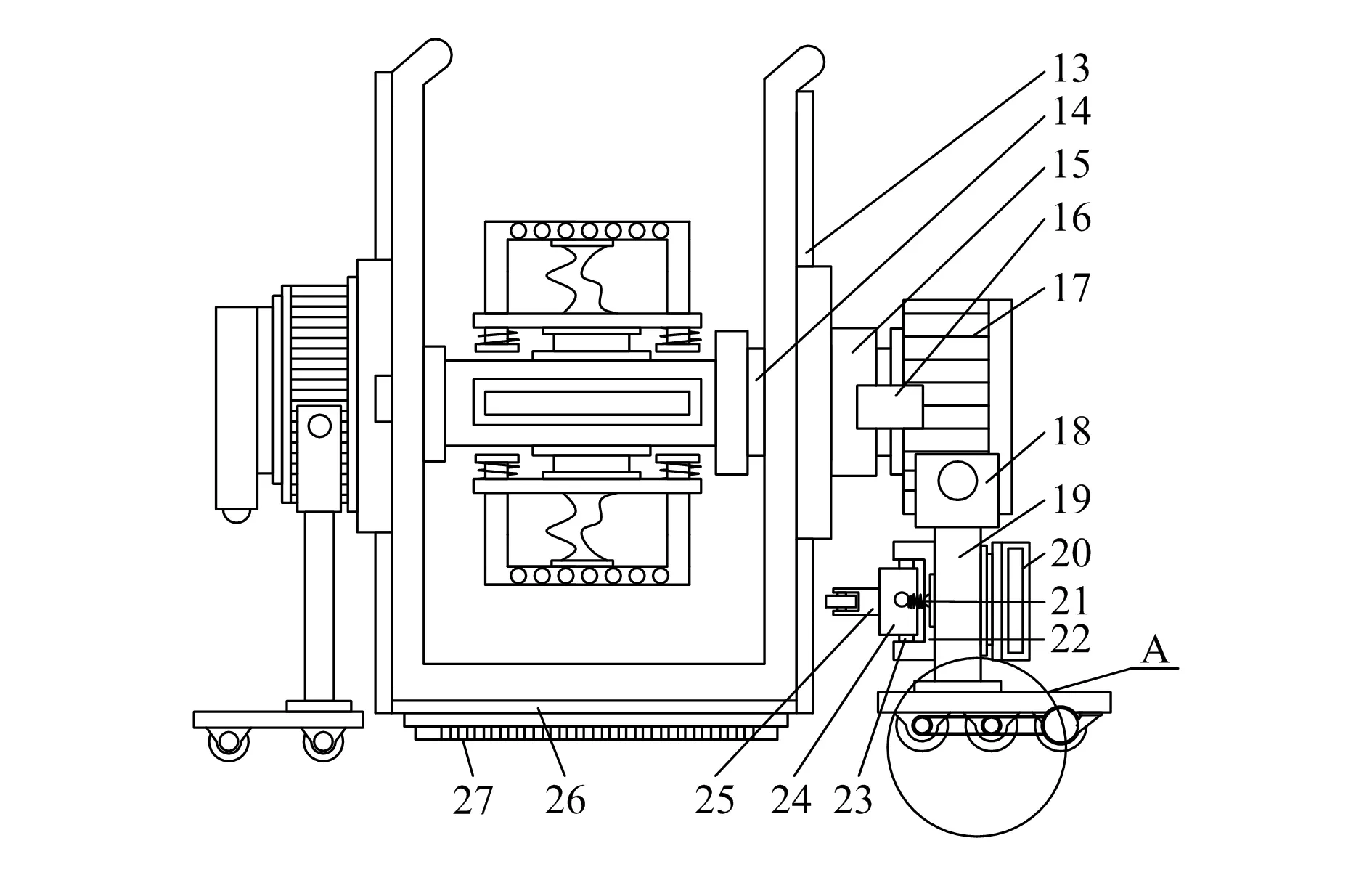
13—旋转管;14—第一托架;15—第二托架;16—风机;17—进气
2.3.1旋转刷的设计
旋转刷的质量对于能否完成对复杂管道的彻底清洗有着重要的作用,为了更彻底清洁管的内壁,提高使用效率,刷子的两个端头被设计成圆弧形,旋转刷中间部分连接气动马达转轴,并且两者之间垂直连接[8]。
2.3.2灰尘收集装置
大型高效空气过滤吸尘器如图6所示,空气收集器通常称为负压空气机,依靠产生的负压吸力将灰尘吸走,从而完成对被扫落灰尘的收集[9]。

图6 灰尘收集装置图
3 结束语
本文设计的中央空调管道清洁机器人通过分析、仿真与验证,结果表明其解决了中央空调管道式通风系统的清洗难题,证明该机器人对中央空调管道内的清洁工作有较强适应能力,同时对同类型的机器人机构设计与研究具有参考价值。