空间非合作目标捕获方法综述
2020-07-13孙永军刘伊威谢宗武金明河
孙永军,王 钤,刘伊威,谢宗武,金明河,刘 宏
(哈尔滨工业大学 机器人技术与系统国家重点实验室, 黑龙江 哈尔滨 150001)
随着世界各国航天活动的发展,有限的轨道资源在逐渐减小[1]。据分析,全球每年约有80~130颗卫星需要发射[2],而且每年的数量还在逐渐增加。自从第一颗人造卫星发射以来,目前在轨已有人造卫星多达数千颗。无论在轨的卫星目前是处于失效还是运行状态,它们都在占用着有限的轨道资源。除此之外,发射卫星后火箭残骸,甚至是航天器事故带来的空间碎片,都会导致宝贵的轨道资源变得越来越少[3-4]。因此,各个国家均针对航天活动的可持续发展开展了大量研究[5]。
目前的研究热点主要集中在两大应用方向:一是针对航天器的在轨服务[6];二是空间碎片的清除[7]。在轨服务是针对那些发生故障(如太阳帆板未正常展开)或推进剂耗尽但其他部组件仍可正常工作的卫星,以及需要维护、维修部组件的航天器。通过加注推进剂、维修故障、更换元器件等操作,延长航天器使用寿命,实现在轨服务,维持目标航天器继续在轨运行,降低航天发射成本[8-9]。空间碎片清除是指通过合适的手段将地球低轨道碎片送入大气层烧毁,高轨道的碎片拖入坟墓轨道,完成太空环境清理,进而重复利用轨道资源[10-12]。
无论是在轨服务还是空间碎片清除,它们均涉及一项关键技术——非合作目标捕获[6],它是实现在轨服务及空间碎片清除的关键。十几年前,欧洲、美国、日本等发达地区已经启动了相关研究,提出了概念计划和演示验证规划[13-14]。近几年,我国也加大了该方面的研究。本文讨论了非合作目标的特点及分类,介绍了国内外非合作目标捕获技术发展的最新状况及进展,总结了国内外现有的非合作目标捕获方法。
1 非合作目标分析
1.1 非合作目标含义
一般地,非合作目标是相对于合作目标而言。典型的合作目标有俄罗斯的“联盟号”[15],我国的“天宫一号”和“神州八号”等[16-17]。空间合作目标是指具有专门设计的对接机构航天器和有特殊设计的合作目标标志器。
空间非合作目标一般是指那些没有装备通信应答机或者其他传感器的航天器,其他航天器无法采用电子讯问及发射信号等手段实现对该类目标的判别或定位。非合作目标具有以下特点:没有安装特征块和合作标志器;没有安装特殊设计的对接接口;不能主动传送其姿态信息。非合作目标通常包括己方未配置合作接口的卫星、安装合作接口但发生故障或燃料耗尽的己方卫星、己方失效卫星的空间碎片及敌国航天器等[13]。
1.2 非合作目标分类
非合作目标的非合作性程度主要是从测量和抓捕这两方面来决定的,因此可把非合作目标分为4类,分类情况如表1所示。
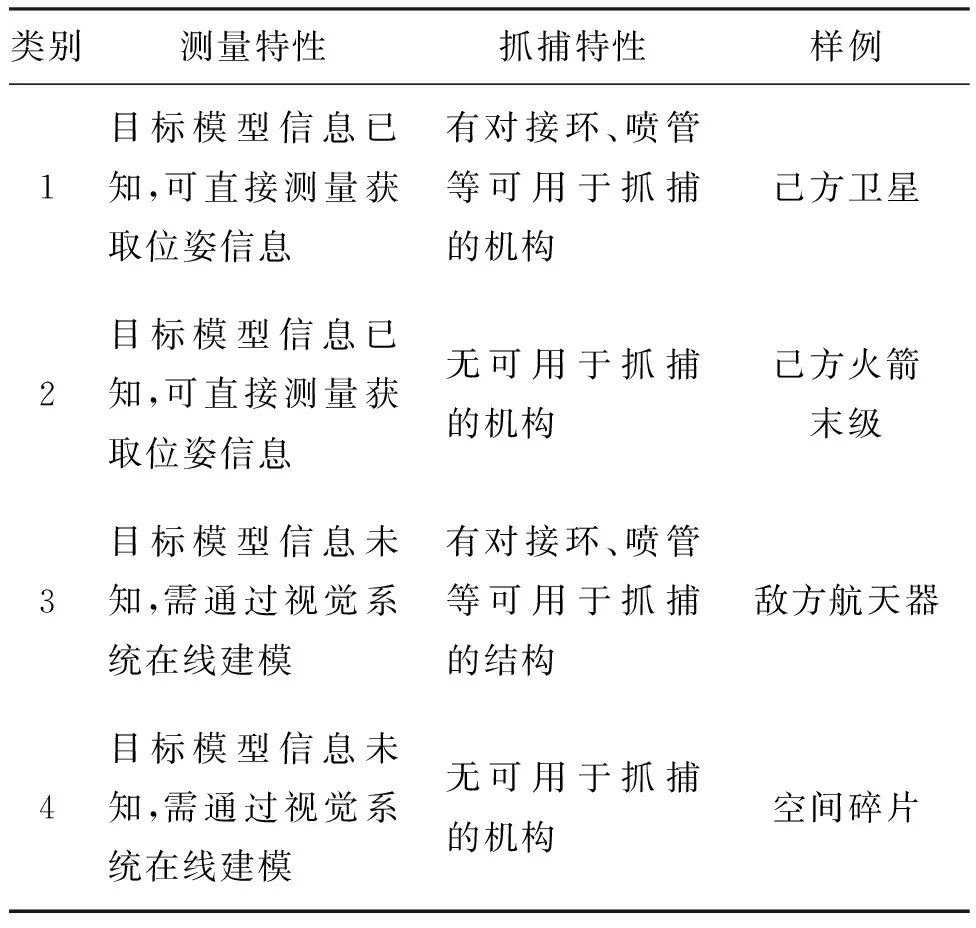
表1 非合作目标分类
2 非合作目标捕获方法
根据与目标是否接触,非合作目标捕获可分为接触式捕获和非接触式捕获。其中,非接触式捕获可通过发射激光或离子束等方式产生作用力,进而推动目标进入预期位置。接触式捕获可分为刚性连接捕获和柔性连接捕获,刚性连接捕获方法主要为机械臂末端配备抓取装置的形式;柔性连接捕获主要有飞网、绳系装置、鱼叉、柔性夹持机构等方式[18],捕获方法分类情况如图1所示。不同的捕获方法能够适应不同的对象,下面将详细对各种捕获方法进行介绍。
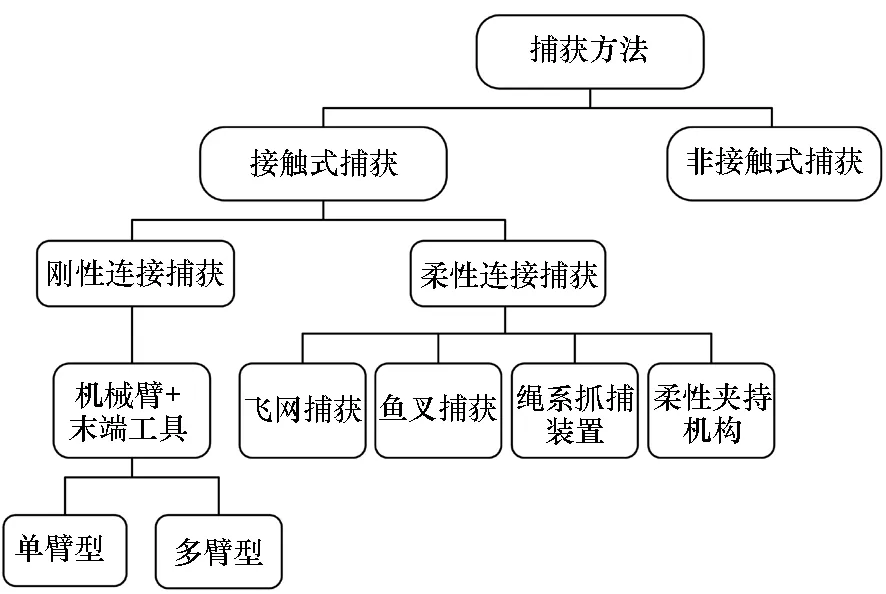
图1 捕获方法分类Fig.1 Categories of capturing methods
2.1 刚性连接捕获
2.1.1 单机械臂捕获方法
单机械臂捕获一般采用一个机械臂及末端抓捕工具的结构形式,该方法主要针对各类航天器,且要求目标具有可实现对接的结构,一般是星箭对接环或卫星发动机喷管。目前,国内外学者和研究机构对单机械臂捕获方法进行了大量研究[19],如德国DEOS(Deutsche Orbital Servicing Mission)、欧洲航天局(European Space Agency, ESA)的e.Deorbit、美国的Restore-L等诸多项目均使用了该方式。
1)DEOS计划
2007年,德国宇航局(Deutsches zentrum für Luft-und Raumfahrt, DLR)开展了一项名为DEOS的研究计划[20-21],该项目主要对LEO上翻滚、失控非合作目标卫星进行抓捕演示验证,并根据任务要求辅助实现飞行器脱离运行轨道。DEOS的捕获方式采用机械臂末端配备抓取装置来抓取目标航天器的手柄[22]。
DEOS机械臂技术以国际空间站机器人组件任务的技术为基础,国际空间站机器人组件是DLR研发的轻型机械臂,机械臂末端安装抓取装置,通过手爪闭合抓住目标手柄,如图2所示。手爪上安装照明系统和1台相机,相机视场角为60°,用于辅助地面观察目标状态。交会过程中所需的传感器系统包括1套近距立体相机、1套中距立体相机、2套远距单色相机、1套对接单色相机、2套无线电探测器及2套激光定位器。
DEOS抓捕过程如下:
①远距离追踪目标至两航天器相距300~5000 m;
②近距离交会,服务航天器逐渐靠近目标航天器至相距几米;
③通过机械臂带着抓取装置靠近对接手柄,抓取装置手爪闭合锁紧,完成抓捕;
④待组合体稳定后,服务航天器带动目标航天器进行离轨。
(a) 机械臂(a) Manipulator
(b) 抓取装置(b) Gripper图2 DEOS捕获机构Fig.2 Capturing mechanism of DEOS
2)SMART-OLEV项目
为了延长地球静止轨道(Geostationary Earth Orbit, GEO)通信卫星的寿命,欧洲诸多国家如德国、瑞典和西班牙等联合开发的一项研究计划[23],即SMART-OLEV。该项目通过伸缩臂末端的抓捕工具实现目标卫星远地点发动机喷管的抓捕[24],如图3所示。伸缩臂为纺锤状机构,采用刚性金属制成,抓取装置安装在机械臂前端,其可作用的距离为0.7 m。抓捕工具如图4所示,由1个锁紧机构、1个位于末端的末端传感器、2个感应传感器和2个激光传感器组成。该机构在伸缩臂作用下插入卫星发动机喷管内,其末端锁紧机构插入喷管的喉部,进而扩展机构张开,最后锁紧喷管喉部,最终完成抓捕。抓取装置上的传感器用来感知与目标喷管的碰撞和感知锁紧机构是否达到锁紧位置。
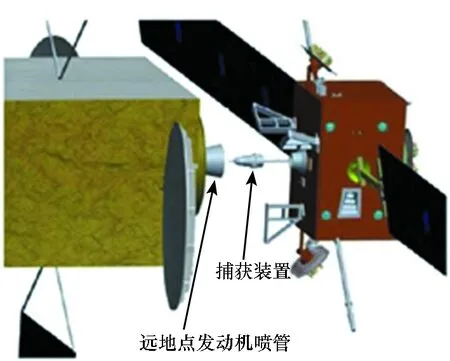
图3 SMART-OLEV概念图Fig.3 Concept of SMART-OLEV
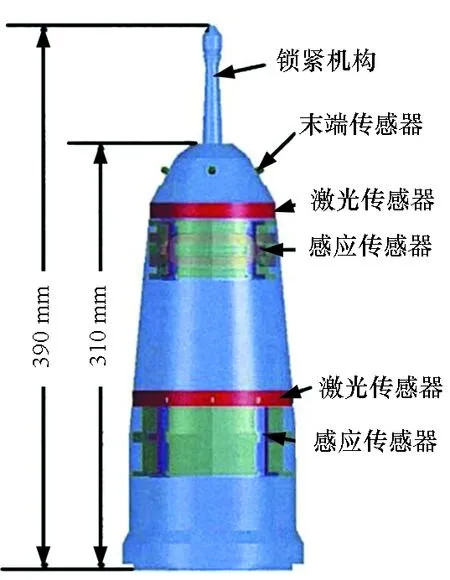
图4 SMART-OLEV抓捕工具Fig.4 Capturing tool of SMART-OLEV
3)MDA抓捕机构
针对抓捕、控制大型空间碎片的技术开发和太空垃圾清理的商业化[25-26],联合MDA、OHB、DLR等多家机构,ESA开展了e.Deorbit mission项目。由MDA公司提出的捕获卫星概念图如图5所示[27]。它主要由机械臂、捕获机构、夹紧机构、传感器系统和控制系统组成。其工作原理是由1个机械臂靠近目标星ENVISAT,进而由抓捕机构捕获目标星,然后再用夹紧机构和目标星上的对接环锁紧,实现捕获卫星与目标的高刚度连接。
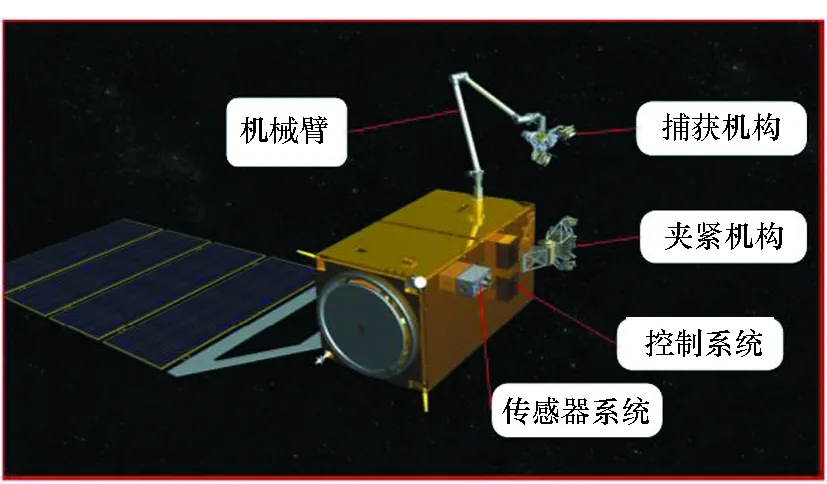
图5 MDA捕获卫星概念图Fig.5 Concept of MDA capturing satellite
抓捕系统由七自由度机械臂和末端捕获机构[28]组成,组成末端抓捕工具如图6所示,抓取对象是目标星的星箭对接环。工作过程包括快速抓捕和刚性抓捕两个阶段。快速抓捕通过螺线管执行,主要实现对捕获对象的包络,防止逃逸;刚性抓捕通过一个电机驱动滚珠丝杠,将回转运动转换成直线运动,进而带动捕获手指进行运动,实现星箭对接环的刚性抓捕。它包含两对手爪,每对手爪侧面均配置用于检测抓捕是否成功的非接触式传感器。中间安装相机和LED灯及自主操作视觉系统,用于照明、测量和自主操作。
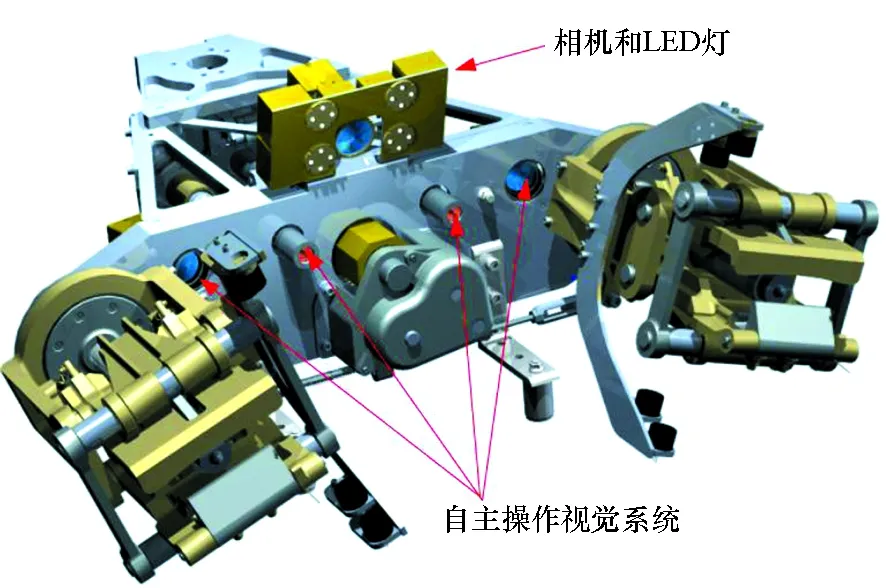
图6 MDA抓捕机构Fig.6 Capturing mechanism of MDA
夹紧机构如图7所示。
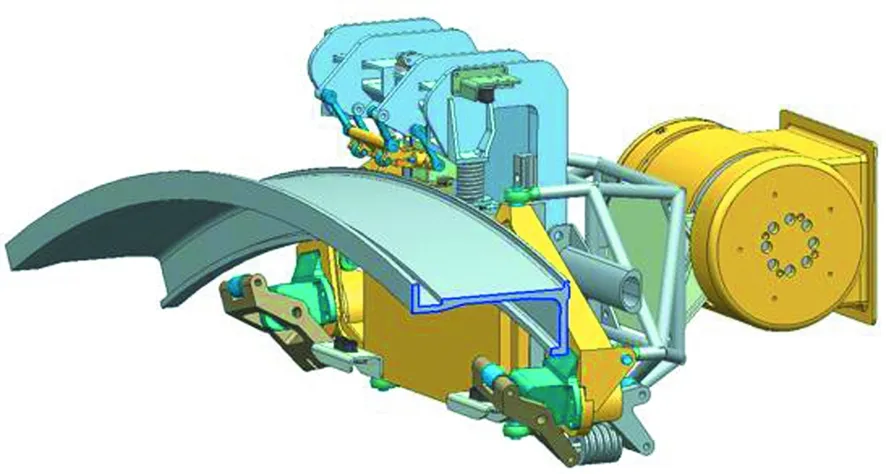
图7 MDA夹紧机构Fig.7 Clamping mechanism of MDA
MDA已完成抓捕机构样机研制,并进行了地面试验,其样机如图8所示。
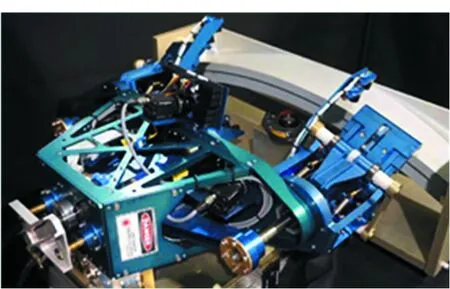
图8 MDA抓捕机构样机Fig.8 Mock-up of MDA capturing mechanism
4)OHB抓捕机构
德国OHB公司针对e.Deorbit项目提出了一种捕获方案[29-30],如图9所示。该捕获系统由抓捕机构及夹紧机构组成,其抓捕位置是ENVISAT的星箭对接环。
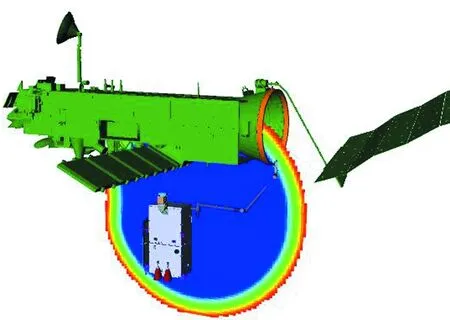
图9 OHB捕获系统概念图Fig.9 Concept of OHB capturing system
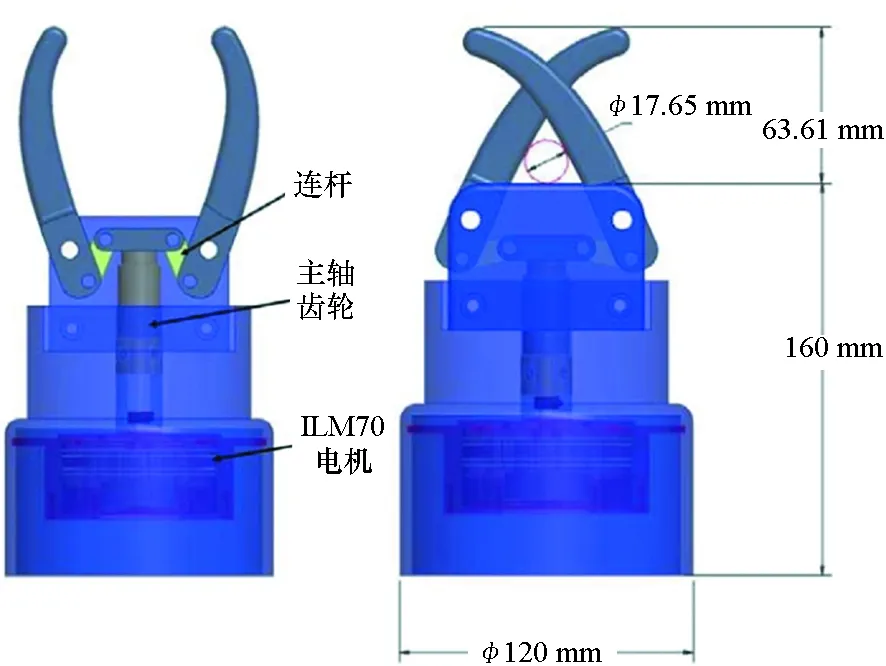
抓捕机构由机械臂和末端抓捕机构组成。末端抓捕机构如图10所示,该机构由两个手爪通过一根左右旋滚珠丝杠连接,电机驱动丝杠正反向转动时带动两个手爪同时靠拢或者分开,从而实现对抓捕目标星箭对接环的锁紧和脱开。手爪的底部与手掌之间安装一条行程35 mm的直线导轨,实现手爪横向移动时的导向作用。每一个手爪上都设计成倾斜15°的钳口,在钳口上安装一个欠驱动的夹子,夹子上有支撑滚子、水平滚子和垂直限位挡块,夹子和手爪之间配备一对压缩弹簧,每个弹簧可提供的最大压缩力为25 N。当手爪捕获星箭对接环之后,15°的钳口可提供一定的垂直作用力,支撑滚子保证对接环处于捕获容差之内,水平滚子实现水平夹紧力的传递,垂直限位挡块提供垂直夹紧力的传递。OHB捕获方案中使用MDA提出的夹紧机构[31]。
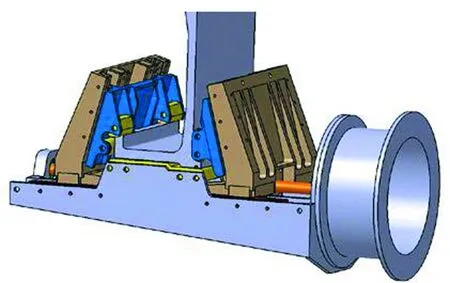
图10 OHB末端机构Fig.10 OHB terminal mechanism
捕获过程如下:
①捕获卫星追踪目标进行交会,接近到一定的距离;
②捕获系统匹配ENVISAT的速度;
③机械臂展开,抓捕工具靠近对接环;
④捕获机构张开,进行抓捕;
⑤进行抓捕后的稳定和机械臂控制;
⑥夹紧机构靠近、夹紧,完成捕获。
5)ADRexp项目
针对主动清除碎片任务(Active Debris Removal, ADR),波兰PIAP公司研制了用于ADRexp项目的抓捕机构[32]。目前,研究人员已经成功进行了地面抓捕验证试验。抓捕机构包含两个独立的夹持器,分别是快速夹持器和强力夹持器,抓捕位置是星箭对接环,它可以直接安装在机械臂末端或者配备在捕获卫星上[33]。
与MDA抓捕工具类似,PIAP抓捕机构的工作原理也分为两个阶段:软抓捕阶段和刚性抓捕阶段。在软抓捕阶段,快速夹持器首先实现对接环的包络,然后由相互错位的颌闭合包拢对接环;在刚性化抓捕阶段,通过强夹持器的颌闭合,锁紧对接环,建立目标星和服务星之间的刚性连接。
对接环抓捕机构有遥控操作和自主操作两种工作模式。在自主操作模式下,抓捕机构根据位姿信息,自主控制接近目标的速度,并通过算法计算抓捕位置和作用力矩,完成自主抓捕。PIAP抓捕机构的夹持器采用模块化设计,对于不同型号的对接环(如图11所示),只需要更换夹持器的手指和颌即可。图12、图13为针对不同型号对接环的两种抓捕机构。
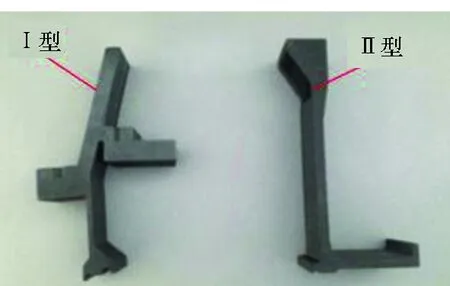
图11 不同类型的对接环Fig.11 Different kinds of launch adapter ring

图12 Ⅰ型对接环抓捕工具Fig.12 Capturing tool for typeⅠ
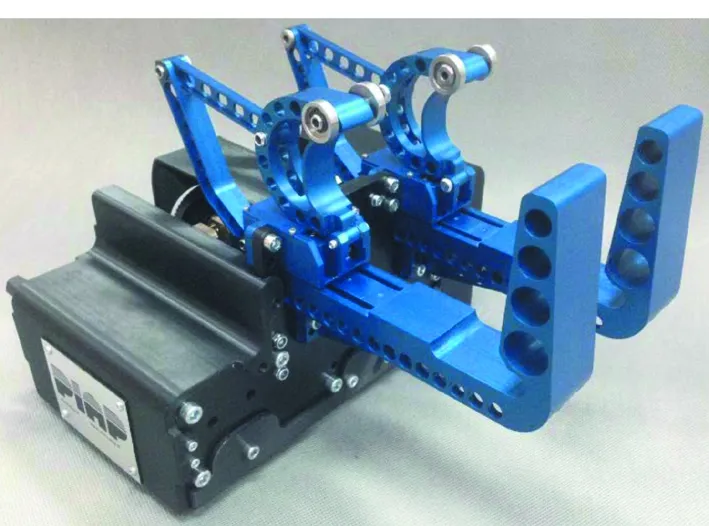
图13 Ⅱ型对接环抓捕工具Fig.13 Capturing tool for type Ⅱ
6)Restore-L抓捕机构
针对一颗位于极地近地轨道(Low Earth Orbit, LEO)的功能卫星,美国宇航局(National Aeronautics and Space Administration, NASA)正在研究一项名为 Restore-L的任务。它通过对卫星进行在轨燃料加注,并展示一套配套相关的服务技术。该技术将验证NASA火星之旅的关键技术,并为在轨服务提供全新的商业机会。
NASA戈达德太空飞行中心提出了一种机器人抓持器,用于抓捕星箭对接环,已加工出原理样机,如图14所示。它具有与对接环的外径侧接合的外侧钳口,该内侧钳口与对接环的内径侧相接,和一个与对接环的分离面接合的手掌。当抓住对接环时,钳口执行两阶段运动,包括在平行于手掌的方向上朝向相对的钳口的水平运动,以及将对接环拉向掌心或其他合适的表面的垂直运动。通过水平相向和竖直向下两阶段的动作实现对对接环的抓捕与锁紧。该抓持器可以适应从Atlas V 到Delta IV的所有对接环,它可以约束服务航天器和客户端之间的全部6个自由度、具备足够的刚度,可完成组合星后续执行主要姿态控制[34]。
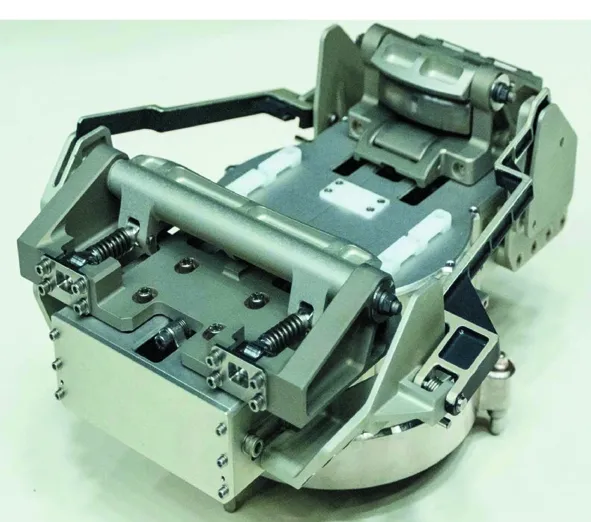
图14 NASA 机械手Fig.14 NASA robotic gripper
2.1.2 多机械臂捕获方法
多机械臂捕获方法采用两个甚至更多的机械臂。在抓捕操作时,多机械臂间可以相互配合,故灵活性更好、抓捕成功率更大。然而,多机械臂捕获的控制却非常复杂。
1)FREND项目
针对机械臂与可更换末端执行器的协同操作和实现非合作目标的自动抓捕,美国国防部高级研究计划局(Defense Advanced Research Projects Agency, DARPA)提出了一项名为FREND (front-end robotics enabling near-term demonstration)的演示计划[13]。
FREND的抓捕对象为目标星的星箭对接环和分离螺栓。它配备了3个七自由度机械臂,在末端通过可更换模块实现工具的在轨切换。由机器视觉进行抓捕对象和抓捕工具的相对位姿测量,当抓捕对象进入抓捕工具的捕获范围之后,根据控制算法自动实现对抓捕对象的捕获。FREND的末端抓捕机构有多种形式,主要有星箭对接环夹钳、螺栓-螺母拧紧夹钳、三爪式锁钩等。因此,FREND机械臂可通过更换不同的末端执行器来满足不同任务的要求。FREND目前已完成地面试验,如图15所示。
图15 FREND功能试验Fig.15 FREND functional testing
2)RSGS项目
地球同步卫星的机器人维修 (Robotic Servicing of Geosynchronous Satellites, RSGS)是DARPA在2014年发起的一项计划[35],目的在于为GEO卫星提供可靠、持久、低成本服务[36]。RSGS项目分为机器人维修车(Robotic Servicing Vehicle,RSV)、地面系统和客户端(client spacecraft)三个部分,其中最为关键的部分为RSV,在轨的各种操作都是由RSV来完成。
RSV概念设计如图16所示,它由机动系统(服务卫星)和有效载荷(机器人)两部分构成,服务卫星用于太空中的移动和交会,机器人用于目标抓捕及后续操作。RSV的有效载荷由两条FREND Mark II型机械臂组成,和FREND一样,RSV具有多种可进行在轨更换的末端工具,可对目标飞行器的分离螺栓、星箭对接环和远地点发动机喷管进行抓捕。RSV结构示意图如图17所示。
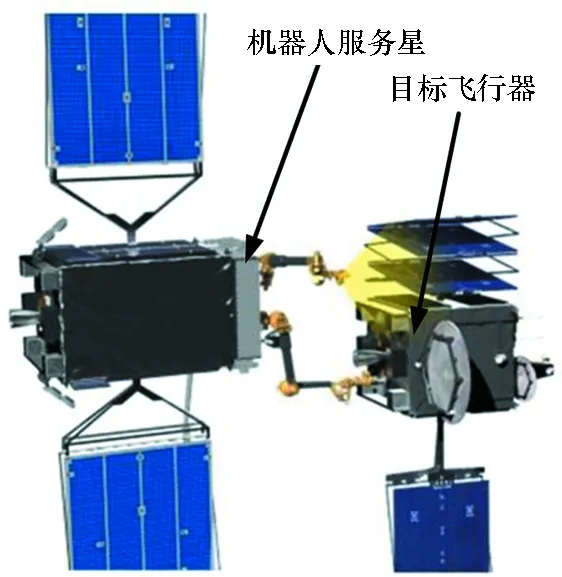
图16 RSV概念设计Fig.16 RSV notional design

图17 RSV结构示意图Fig.17 RSV structure
DARPA预计在2021年实现RSV的在轨演示。
3)三机械臂对接机构
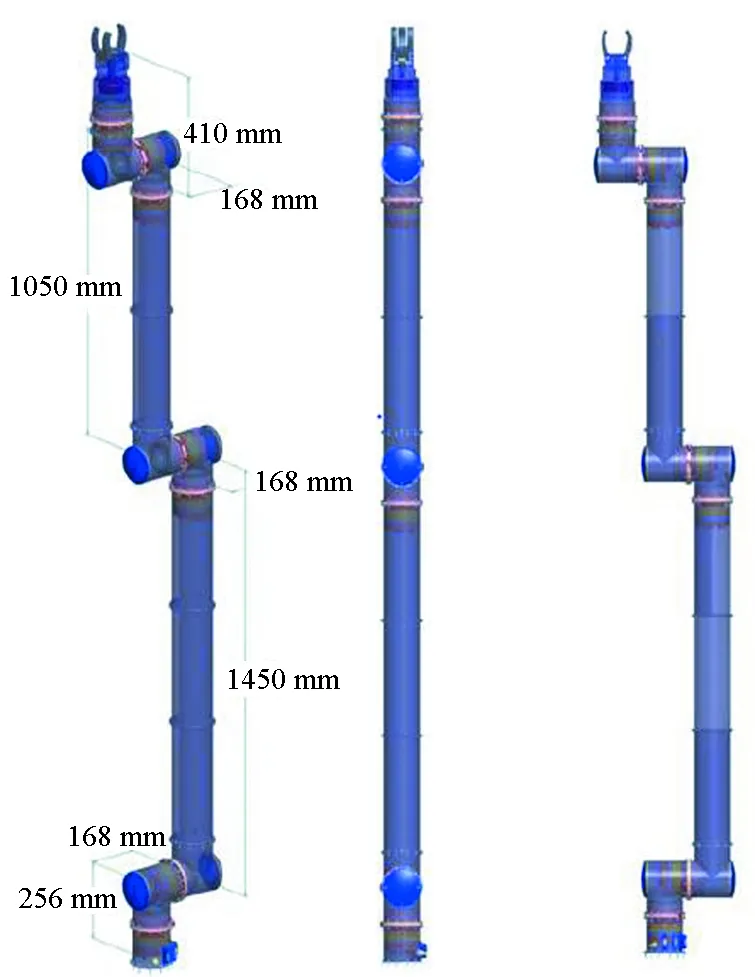
王晓雪、张广玉等提出了一种对接机构[37-38],已完成了原理样机加工。该捕获机构的抓捕对象是卫星的远地点发动机喷管。对接机构主要由支架机构、3个机械臂和3个末端执行器构成,如图18所示。
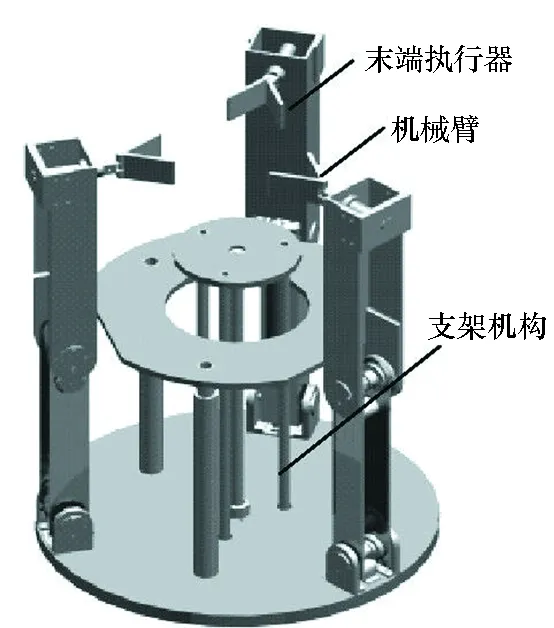
图18 三臂型对接机构Fig.18 Docking mechanism of three-arms
它通过3个120°布置的末端执行器构成1个有效区域,实现对发动机喷管包络,防止喷管逃逸,然后末端执行器逐渐合拢,对目标完成抓捕。对接机构原理如图19所示。
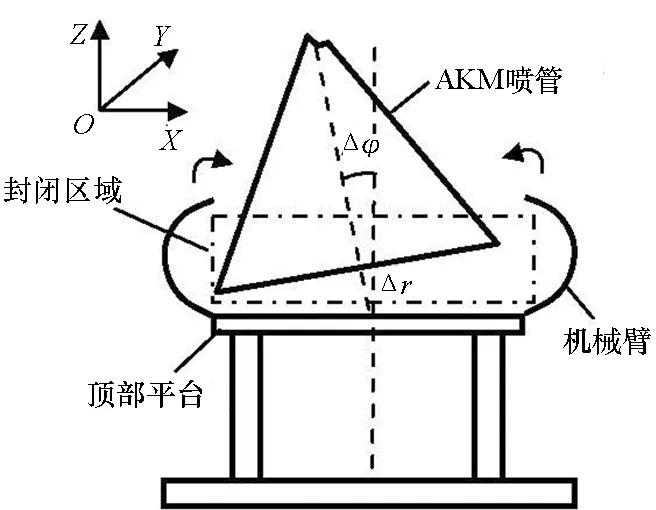
图19 对接机构原理Fig.19 Principle of docking mechanism
4)NUAA抓捕机构
2017年南京航空航天大学(Nanjing University of Aeronautics and Astronautics, NUAA)的潘正伟针对具备1194A星箭对接环的失效卫星抓捕,提出了一种抓捕方法[39],它通过3个相对于环轴线120°均匀布置的抓捕机构逐次对目标进行抓捕,其概念设计如图20所示。
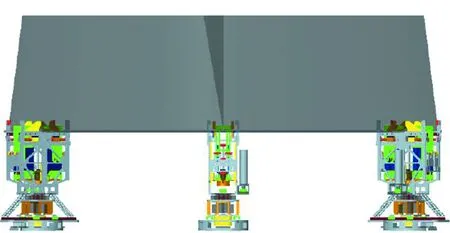
图20 NUAA捕获系统概念图Fig.20 Concept of NUAA capturing system
抓捕机构主要由底座阻尼柔顺机构、驱动机构、四连杆抓取机构、横向阻尼锁死机构、支撑机构和预紧力加载装置组成。四连杆机构上的卡爪为主要执行装置,横向锁死机构实现卡爪对对接环的辅助固定,底座阻尼系统可降低目标捕获后的动能,如图21所示。
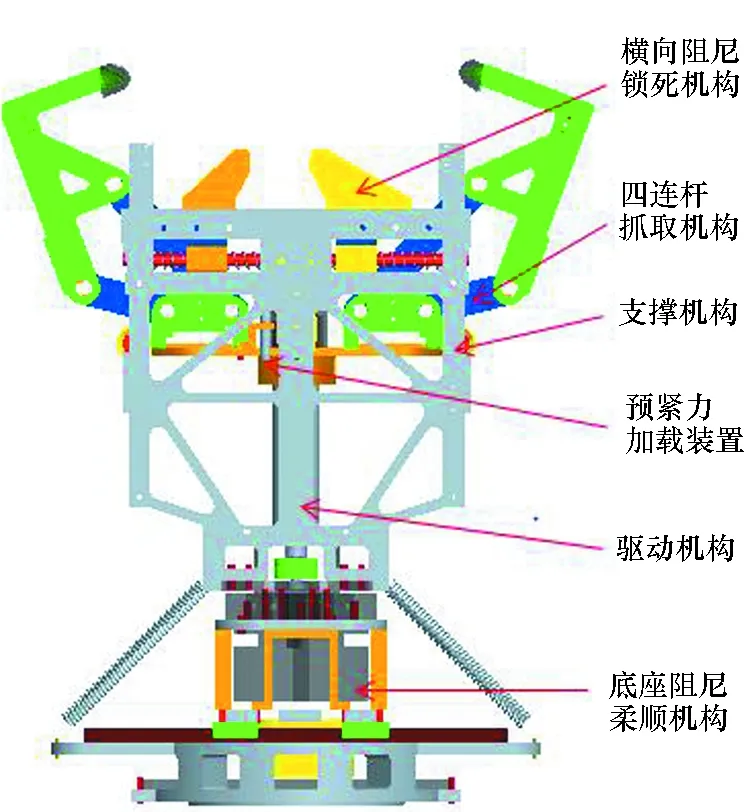
图21 NUAA抓捕机构组成Fig.21 Composition of NUAA capturing mechanism
目前该NUAA已完成样机加工、性能测试,样机如图22所示。
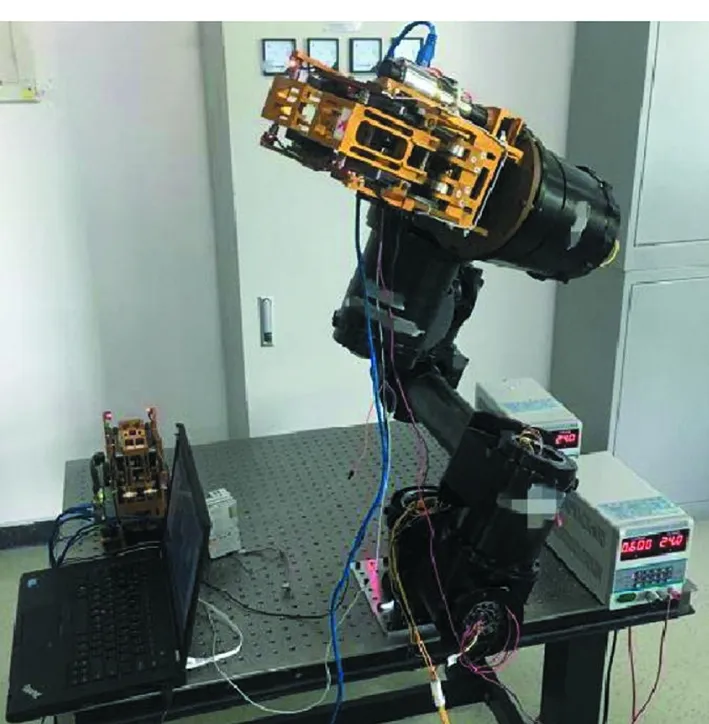
图22 NUAA样机Fig.22 NUAA prototype
2.2 柔性捕获
刚性捕获的优点在于目标卫星(客户星)与捕获卫星(服务星)之间为刚性连接,对接非常稳固。方为后续执行在轨维修、维护、燃料加注等服务提供便利条件。不足之处在于服务星容易与客户星发生碰撞,导致任务失败。此外,刚性捕获对于服务星的控制性能要求非常高,导致技术难度大,研制成本高。为了克服以上不足,研究人员开发了柔性捕获方法。目前,该方法主要包括绳系抓捕装置、飞网捕获、鱼叉捕获和柔性夹持机构。
2.2.1 绳系抓捕装置
黄攀峰等、王东升研发了一种空间绳系机器人(Space Tethered Robot, TSR)[40-41],如图23所示。它利用绳系代替具备多自由度的空间机械臂,构成空间平台、空间绳系和抓捕装置的空间机器人。
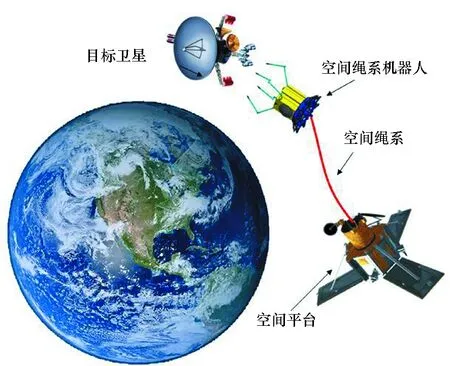
图23 空间绳系机器人概念图Fig.23 Concept of tethered space robot
该机器人可实现碎片清理和在轨捕获等操作,其操作范围远达数百米,远远超过传统空间机器人的操作范围(数米)。操作距离的加大可有效避免空间平台与目标卫星的直接接触,进而消除与目标可能发生的碰撞,安全性大大提高。空间绳系机器人的工作原理主要由平台变轨、目标捕获和拖曳变轨三个阶段组成,如图24所示。
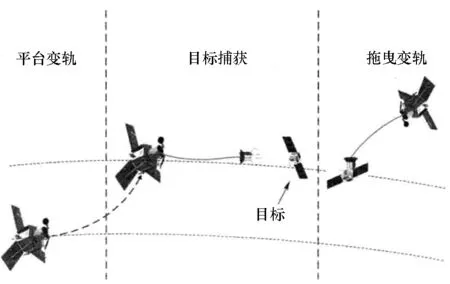
图24 空间绳系机器人任务流程Fig.24 Mission process of TSR
2.2.2 飞网捕获
飞网捕获方法是现阶段非常热门的一个研究方向,它通常用来清除空间碎片或者将失效航天器离轨。由于飞网捕获的适应性强和成本低等优点,该方法目前在欧洲许多国家得到了重视,很多研究项目都使用了该方法[42]。
飞网的结构通常采用四边形,在四个角上配备质量块,称为“子弹”。它们有两个作用:发射飞网后辅助飞网张开;飞网接触目标之后,在惯性力作用下,子弹交错,将目标包裹。飞网通过绳系与服务航天器(服务星)平台连接,当飞网包络和抓捕目标后,通过对服务航天器的控制,可拖动目标实现离轨操作[43]。
飞网捕获的技术瓶颈主要包括两部分:柔性飞网动力学建模和飞网碰撞动力学建模。前者的关键是如何建立可准确表述飞网动力学模型的柔性特征,后者主要研究飞网与目标接触、碰撞过程中的力学问题。相关研究计划如下所述。
1)PATENDER
PATENDER是由西班牙GMV公司提出的一项研究计划[44],目标是研发一种专门的模拟器,用来验证飞网捕获方法的设计和仿真。图25为模拟器中建立的飞网模型。
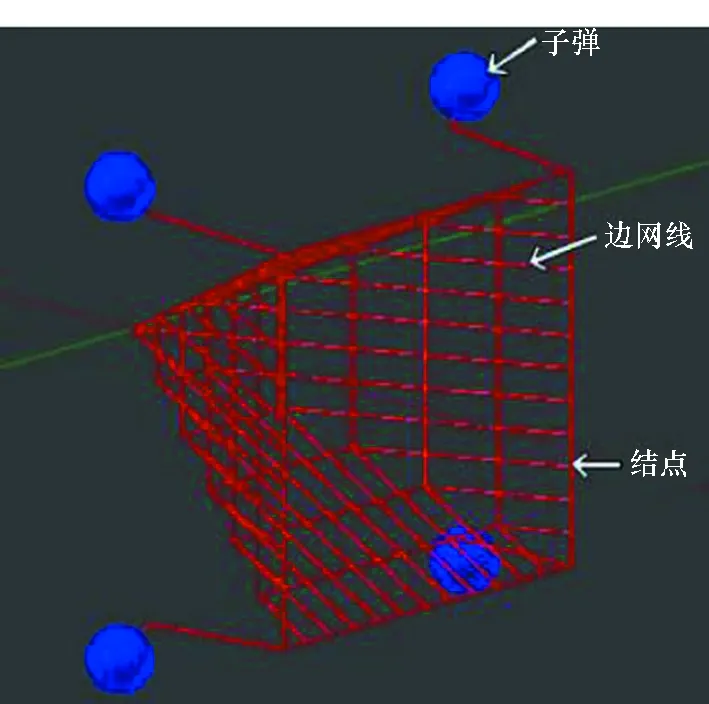
图25 PATENDER飞网模型Fig.25 Net model of PATENDER
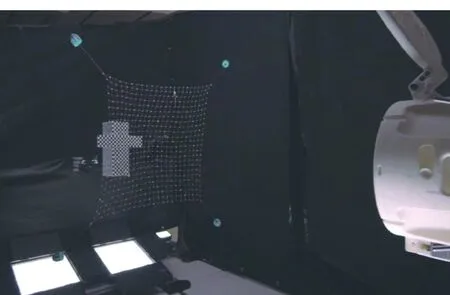
图26 PATENDER飞网实验Fig.26 Net experiment of PATENDER
针对该模拟器的可行性,研究人员进行了一系列试验进行验证,如图26所示。试验过程如下:将卫星实物模型置于微重力环境下,发射飞网对卫星模型进行抓捕,飞网的轨迹和抓捕过程可通过高速摄像机记录,最后根据试验数据重建飞网三维模型及整个抓捕过程[45]。
通过改变飞网结构、子弹质量、形状、发射角度和速度等,测试了多组实验并进行对照。比较模拟捕获过程和试验3D重建结果,发现模拟和试验结果大体相吻合,表明了模拟器的可行性。图27展示了飞网包裹目标的过程。
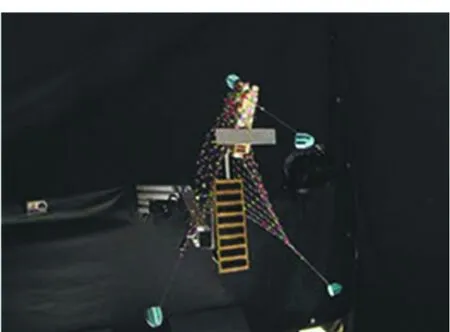
图27 飞网包裹过程Fig.27 Process of net wrapping
2)RemoveDEBRIS飞网
RemoveDEBRIS是ECFP7(欧盟第七框架计划)下的一个项目,旨在进行主动碎片清除技术的在轨演示实验[46]。该项目中飞网捕获目前已经完成了地面实验验证,如图28所示。
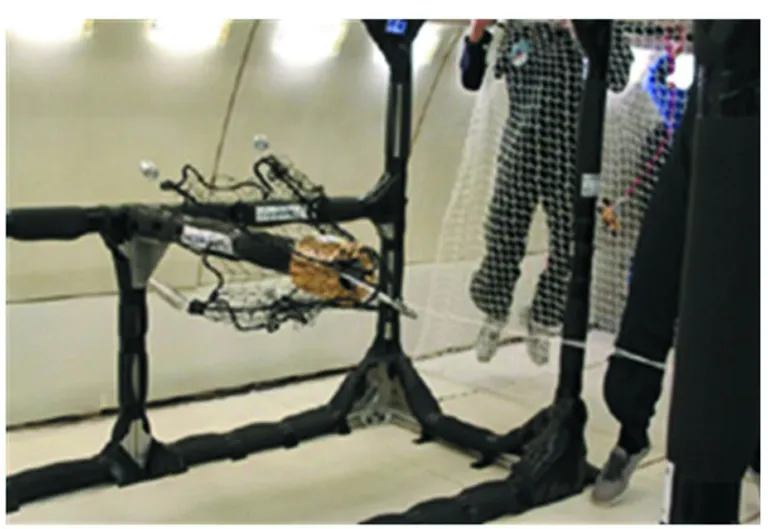
图28 RemoveDEBRIS飞网实验Fig.28 Net experiment of RemoveDEBRIS
飞网捕获实验的主要过程为:第一步,从实验平台上以较低的速度(5 cm/s)释放一颗小的立方体卫星作为碎片目标。该立方体卫星上搭载了可充气膨胀的气球,可为飞网捕获提供一个较大的目标。第二步,气球充气膨胀。第三步,发射飞网进行抓捕,当飞网接触到目标时,部署在飞网末端的质量块交错缠绕住目标,防止飞网再次打开。第四步,利用飞网带动目标进行离轨。实验过程如图29所示。飞网捕获已在2019年成功实现在轨演示[47-48],该项目源自欧盟委员会资助的主动碎片清除任务。

图29 RemoveDEBRIS飞网实验过程Fig.29 Process of RemoveDEBRIS net experiment
2.2.3 鱼叉捕获
鱼叉捕获是最近几年新提出的一种捕获方法[49]。它的工作过程如下:平台发射一个带有倒钩的鱼叉装置;装置穿透目标,倒钩打开防止鱼叉脱落;鱼叉的尾部与平台通过系绳相连。其概念设计如图30所示。鱼叉捕获方法的优点在于:能够适应多种形状目标;能够在较远的距离捕获目标;不需要特定抓捕点。鱼叉捕获的缺点是抓捕时会产生新的碎片。虽然鱼叉捕获的优势并不突出,但该方法成本低廉、容易进行地面试验验证,故鱼叉捕获方法在多项研究计划中被采用。
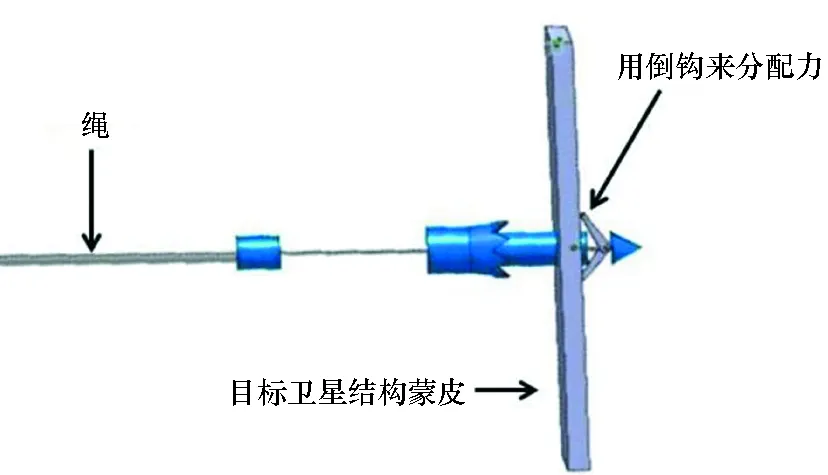
图30 鱼叉装置概念图Fig.30 Concept of harpoon mechanism
1)RemoveDEBRIS鱼叉
RemoveDEBRIS的构成如图31所示[50],鱼叉和发射装置位于上部,底部安装一个可伸缩的机械臂,它连接着10 cm×10 cm的铝制目标板,当机械臂向外伸展时,目标板会一起离开平台,达到1.5 m距离时机械臂停止运动,随后发射鱼叉开始试验。
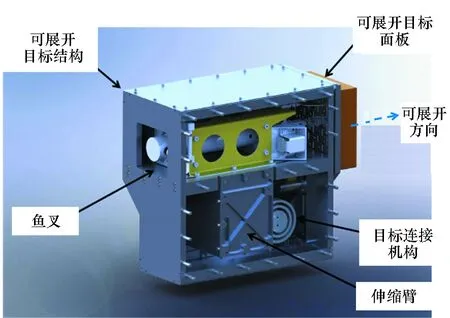
图31 鱼叉实验平台Fig.31 Harpoon experimental platform
在装置尾部安装气体发生器,待产生的气体释放,进入装置后部腔体,产生的气压作用在活塞上,活塞连着抑制机构。当压力达到一定阈值时,抑制机构释放,活塞推动鱼叉发射。装置的前端有一个保持机构,防止鱼叉提前发射。显而易见,鱼叉需足够的动量才能让它穿透目标,在质量一定的前提下,速度是一个关键数值,经地面测试可知,穿透给定铝板所需的速度为20 m/s。RemoveDEBRIS项目于2017年完成了鱼叉装置的样机研制,如图32所示,并进行了地面试验[51]。

图32 鱼叉发射装置样机Fig.32 Mock-up of harpoon launcher
2)e.Deorbit鱼叉
e.Deorbit项目中也进行了鱼叉捕获研究[52],该项目中的鱼叉机构由Airbus公司负责研制。图33为e.Deorbit项目中的鱼叉结构。

图33 ESA鱼叉Fig.33 ESA harpoon
Airbus公司详细研究了鱼叉穿透目标时的碎片产生情况以及在低温环境下鱼叉穿透铝板的性能。图34为鱼叉穿透实验,研究人员通过大量的实验验证了鱼叉捕获的可行性[53]。在欧盟委员会资助的主动碎片清除任务中,于2019年成功实现在轨演示[47-48]。
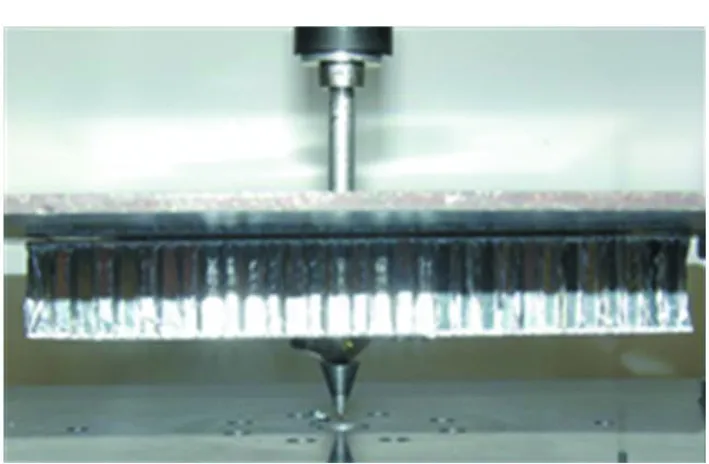
图34 Airbus鱼叉实验Fig.34 Harpoon experiment of Airbus
2.2.4 柔性夹持机构
利用一些特殊材料的特性,如仿壁虎脚的微纳米黏附和介电弹性体材料等,实现对目标柔性捕获的机构称为柔性夹持机构。新型材料的某些独特性质为非合作目标捕获带来了新的发展方向。
1)CSO
在2012年,瑞士洛桑联邦理工学院提出了一项研究计划——CSO(clean space one)[54],它的目的在于针对空间碎片清除,研发一种清洁卫星。CSO是一颗微型卫星,通过由介电弹性体材料组成的夹持器抓捕空间碎片[55]。它是一种高介电常数的弹性体材料,在外界电刺激作用下可变体积和形状,当外界电刺激消失后,又可恢复到原始体积和形状。采用该材料的可折叠柔性夹持机构,能够通过控制电压以实现对目标的抓捕。夹持器抓捕手指的变化角度约为60°,抓取力为0.8 mN,执行器原理样机的质量约为0.65 g,CSO的设计理念如图35所示。
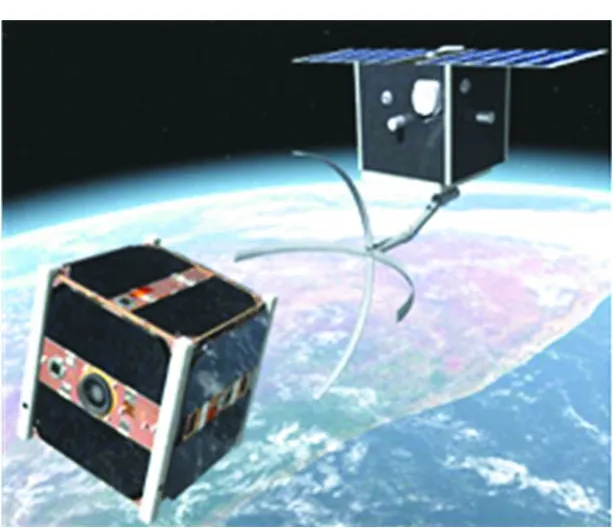
图35 CSO概念图Fig.35 Concept of CSO
图36描绘了预期捕获场景的示意图,抓捕过程包含五个阶段:①初始状态,夹持器压缩,可保证体积最小;②夹持器伸展;③夹持器展开,使开口尺寸到达最大范围;④CSO包络目标,防止逃逸;⑤夹持器继续闭合实现对目标的抓捕。
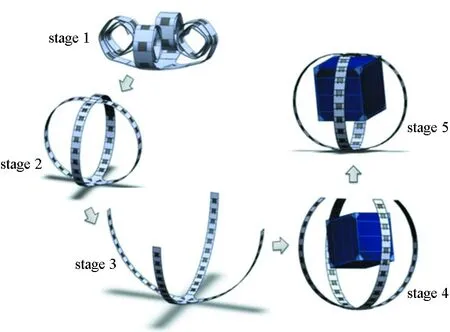
图36 CSO抓捕过程Fig.36 Capturing process of CSO
2)仿壁虎黏附机构
通过对壁虎脚掌特殊生理机构的研究,国内外学者研发了类似的仿生材料。该材料具有很强的黏附性能,Tadini等[56]制备的材料法向黏附强度可达6 N/cm2。戴振东等[57]开发了具有很好黏附性能的碳纳米管阵列。因其良好的黏附性能,有学者提出可将该材料用于空间目标捕获,原理是通过材料的强黏附性粘住目标,防止逃逸[58]。麻省理工学院和德国布伦瑞克工业大学联合设计了一种采用仿壁虎黏附阵列的抓取机构[59-60],如图37所示。
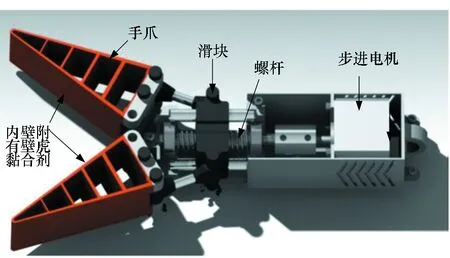
图37 仿壁虎黏附机构Fig.37 Capturing mechanism of bionic gecko
夹持器由步进电机、螺杆、滑块、导轨和手爪等组成。步进电机固定在机壳上,通过联轴器和螺杆连接,滑块一端和螺杆固连,一端和手爪铰接,手爪内侧夹持面上放置仿壁虎黏附阵列。当步进电机动作时,可带动滑块往复移动,进而实现手爪的张开与闭合。该机构的抓捕方式如图38所示。夹持器安装在机械臂的前端,在机械臂的作用下靠近目标,然后夹持器前端夹子张开一定角度,随后手爪贴住目标,随着手爪慢慢合拢,在手爪内侧黏合剂的作用下黏附目标,完成目标捕获。调整手爪的张开角度可抓取不同形状和大小的目标,具有较强的适应性。目前国外研究机构已进行了相关测试。
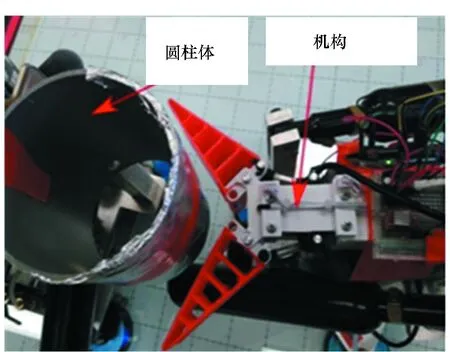
图38 抓捕过程示意图Fig.38 Illustration of capturing process
2.3 非接触式捕获
接触式捕获由于与目标间有接触力,因此可能会产生组合体系统不稳定的风险。而非接触式捕获由于与目标没有直接接触,不会产生该风险,故国外学者提出采用非接触式捕获方法来清理空间碎片。
2.3.1 激光系统
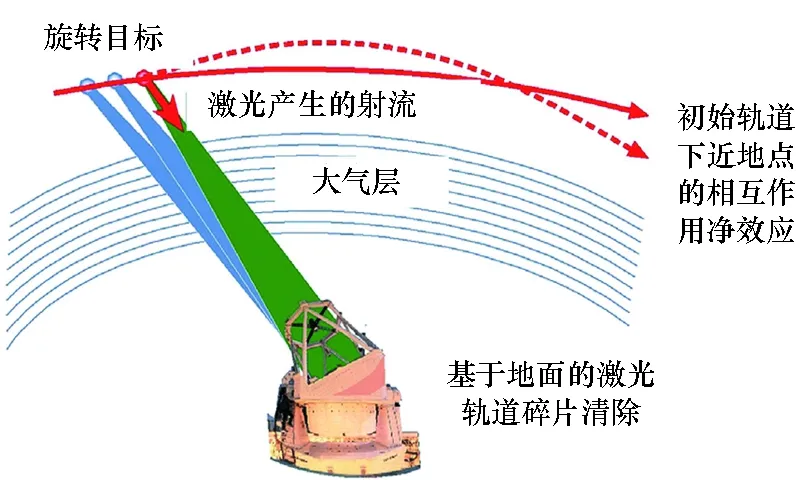
图39 LODR概念设计Fig.39 Concept of LODR
激光系统是一种通过发射脉冲激光来减小空间碎片速度和高度的方法,该方法既可清除大的空间碎片,也可以清除小的空间碎片。Phipps提出的LODR(laser orbital debris removal)[61]系统能够每8周将Envisat推离轨道40 km,该激光系统可以安装在赤道、极地或者船上,其概念设计如图39所示。研究人员发现,目标被激光照射时的响应与其形状有关,Liedahl研究了激光喷射不同形状物体时的响应[62],包括立方体、球体、平板、旋转平板和圆柱等。为了减少激光对目标的操作时间,需要知道目标的精确轨道信息。
2.3.2 IBS
IBS(ion beam shepherd)是一种将中和等离子束射到碎片上,从而降低其高度的方法,在ESA的空间碎片清除计划中曾讨论了该方法的可行性。其通过一颗装有Shepherd的追踪星来接近目标,然后将等离子束射到目标上,进而将目标推离轨道[63],如图40所示。
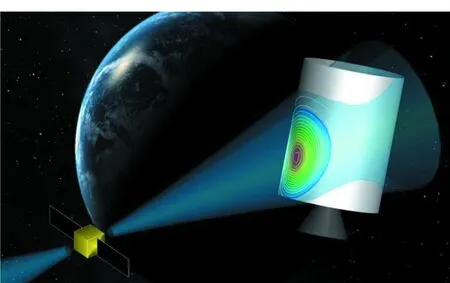
图40 IBS概念图Fig.40 Concept of IBS
该方法的优点在于整个碎片清除过程中不会产生接触,并且不会带来污染,因为发射的等离子体最终会回落到大气中。与激光系统类似,IBS也有形状依赖性问题。Bombardelli研究了等离子束照射球形和圆柱形碎片的动态响应[63-64],通过最小化Shepherd质量优化了整体系统。根据研究,捕获卫星和目标之间的距离需要保持在10~20 m,并且需要另一个推进系统来保持两者间的距离。研究人员通过数值分析和实验得出了结论:使用2500 kg的Shepherd可以在170天内清除6个GEO轨道的碎片[65]。
3 捕获方法分析
考虑到空间非合作目标通常不具备专门用于对接的接口,因此,选择捕获方法时应该根据实际情况决定。空间非合作目标尤其是故障航天器或失效卫星等均具有类似的通用结构,如许多卫星尤其是大型卫星,均具备远地点发动机喷管和星箭对接环等共性特征。考虑到它们是卫星的通用结构且具备较高的强度,因此,通常选择它们作为理想的抓捕目标。国内外研究机构研制的多种非合作目标抓捕工具均以此为依据,如国外DEOS、e.Deorbit等任务,国内的三机械臂对接机构。捕获机构基本上均采用机械臂安装抓捕工具的形式实现对目标的抓捕。
对于不具备通用结构的空间碎片等非合作目标,通常采用飞网、绳系装置、鱼叉、黏附等捕获方法。此类方法相对于传统机械臂捕获,难度小、成本低、效果显著,因此最近受到国内外研究人员越来越多的关注。表 2总结了目前国内外主要的捕获方法。
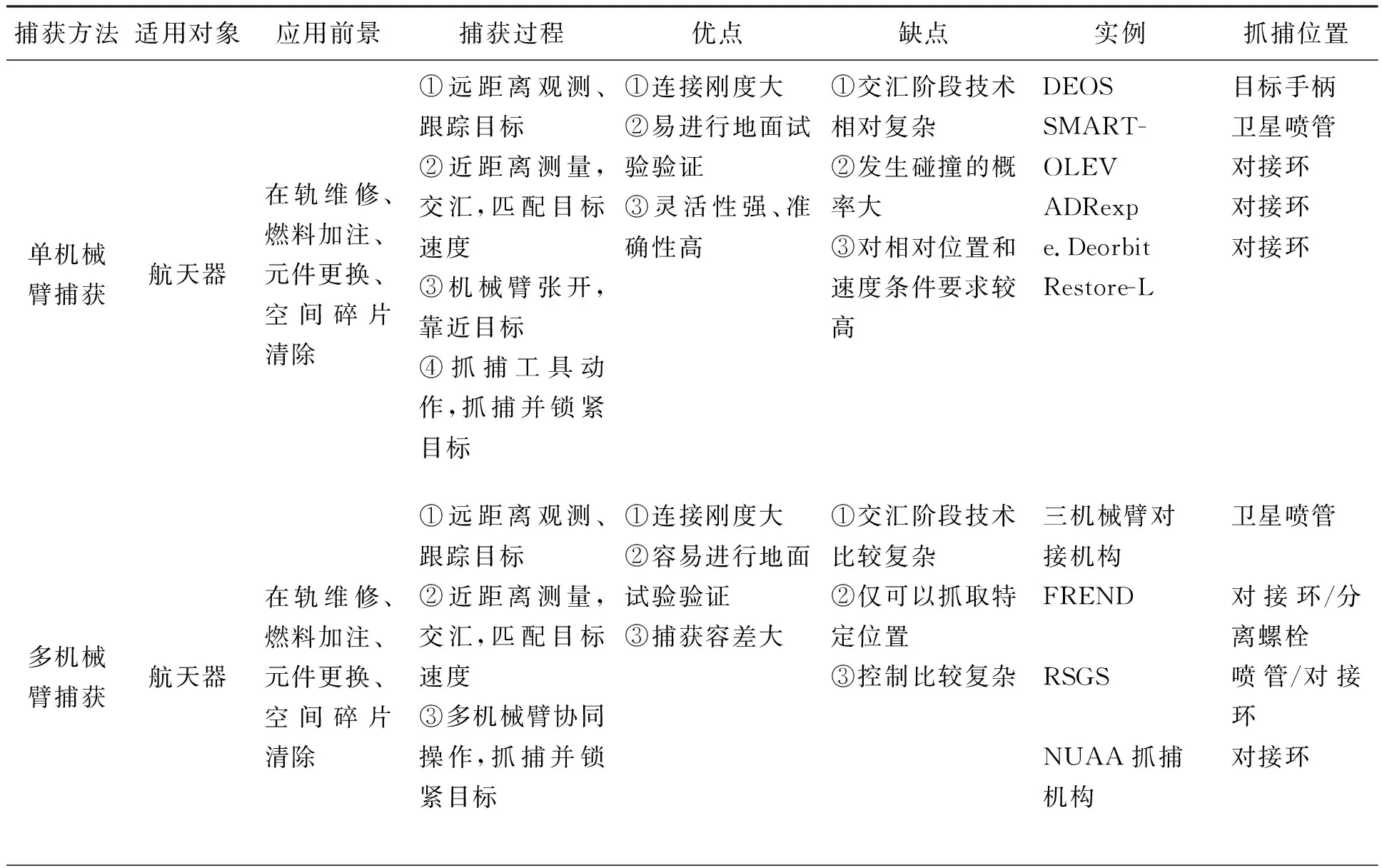
表2 捕获方法总结
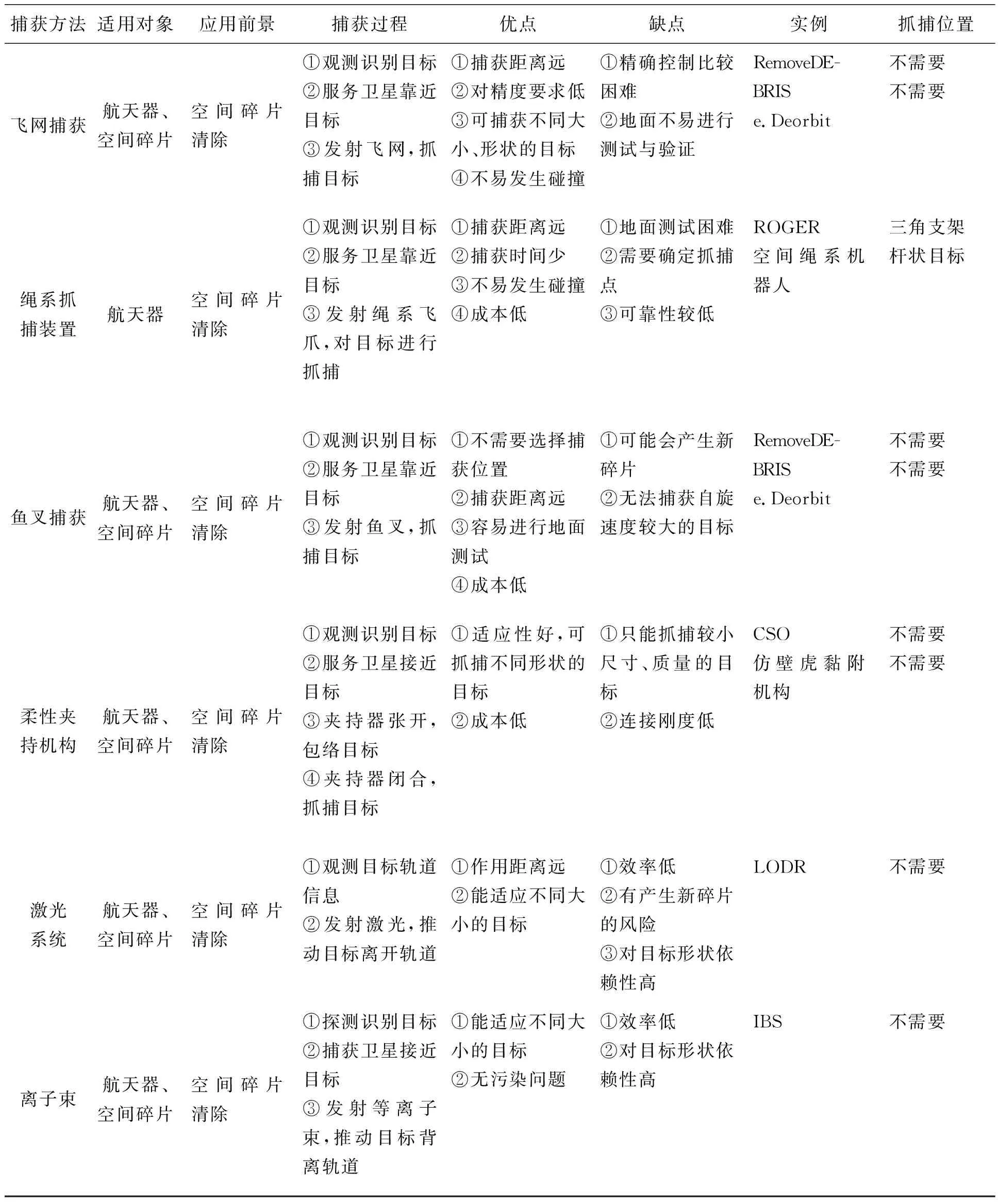
表2(续)
4 关键技术
非合作目标捕获过程一般可分为目标探测识别阶段、接近靠拢阶段和抓捕阶段。这些阶段中涉及的关键技术如下。
4.1 非合作目标测量技术
在交会、抓捕过程中需要对目标的各种信息进行探测,通过测量的信息来判断目标状态,然后引导捕获系统接近、捕获目标。需要测量的信息包括目标的相对位姿、目标的相对速度、目标的几何结构、尺寸等信息,对于航天器目标,还需要对发动机喷管和对接环等特定结构进行跟踪测量,获取实时相对位姿、速度等信息,从而实现后续的准确捕获。
由于非合作目标上没有用于定位和识别的标志器,因此如何获得目标的准确信息是目前研究的一大难点。国内外相关的学者已提出了一些方法,如采用激光雷达和红外相机组合探测的方式,可对目标进行多方位的观察;近距离时采用双目可见光学相机进行视觉测量计算。但是,这些方法都有相应的局限性,距离实际应用仍有不小差距。
4.2 接近停靠技术
在接近靠拢阶段,首先捕获系统要接近目标到一定的距离,然后进行近距离逼近及停靠。在接近过程中,由于空间环境复杂,通过测量技术获取的目标信息较少,故需要导航系统能在较少测量信息的情况下提供高精度的导航信息。此外,在近距离逼近时,相对位置和姿态的变化会直接影响测量和控制精度。能否实现安全地接近并停靠取决于捕获平台导航与控制系统的性能,因此,如何提高导航精度及控制系统的响应速度和控制精度是重点要解决的问题。
4.3 非合作目标消旋技术
非合作目标大多处于失控状态,受重力及自身残余角动量的影响,往往会出现复杂的旋转运动。由于目标的运动规律比较复杂,这种情况下直接对其进行抓捕很可能会导致抓捕失败,因此需要对目标进行消旋处理,将目标的旋转速度减慢,然后再进行抓捕操作。目前,国内外研究机构提出了多种消旋方法,如通过电磁消旋、离子束消旋、气体冲击消旋等,这些消旋技术的突破将有助于非合作目标捕获的成功进行。
4.4 非合作目标抓捕技术
抓捕技术主要涉及两方面的内容,下面对其分别进行介绍。
第一方面是硬件。对于刚性捕获,其关键在于灵巧机械臂技术与末端执行器技术。太空环境与地面环境差异巨大,相比于地面,太空环境具有高真空、微重力、温差大及辐射强等特点。空间环境的恶劣性对机械臂和末端执行器的结构、可靠性均提出了更高的要求。
为了实现抓捕及后续在轨操作任务,对机械臂的长度、构型、质量等都有特定的要求。其长度和构型须满足在轨任务所需的工作空间要求,机械臂的质量要求尽可能小,质量大不仅增加发射成本,也不利于在轨精细操作。减轻机械臂质量主要依靠材料,机械臂的外壳、内部结构等均尽量采用比强度高的材料。为确保抓捕任务顺利,机械臂在关节及末端配置有力/力矩传感器,用于感知关节及末端的力/力矩信息。
刚性捕获的末端执行器是与目标直接接触的部分,所以要求末端执行器具有高刚度和高强度。末端执行器的另一个关键参数是其包络范围,这决定了抓捕容差的大小。考虑到可靠性要求,机械臂及末端执行器通常会采用电气冗余备份的方式来提高可靠性。
对于柔性捕获,其中的飞网抓捕主要在于飞网结构、飞网材料等方面。飞网结构涉及飞网边缘质量块形状的设计及网格大小、形状。不同形状的质量块对飞网的飞行及缠绕性能都会有影响。有研究证明,网格形状采用方形,网格尺寸l与网边长L之比l/L在1%~5%时飞网的性能最好。飞网材料要求质量轻、强度高以及韧性好等,可用的材料有Zylon纤维、Kevlar纤维、Vectran纤维等。鱼叉捕获的发射机构影响着鱼叉的射程及穿透力,目前的研究多采用气动机构作为发射机构。此外,鱼叉的顶端结构设计影响着穿透性能以及穿透后能否钩住目标。柔性夹持机构的关键主要是特殊材料的应用,如介电弹性体材料、仿壁虎黏附材料等。
第二方面是控制。不管是刚性捕获还是柔性捕获,在抓捕过程中与目标的接触碰撞都是需要解决的一个难点。对于刚性捕获,其末端执行器与目标的接触力大,容易将目标弹开,且可能对机械臂产生破坏,因此需要采用柔顺控制策略,若是多机械臂协同捕获,则还需要考虑多机械臂的同步性。为保证抓捕过程可控,可在末端执行器上安装位置、力/力矩等多种传感器。此外,抓捕后组合体的质量、惯量、质心位置都会发生改变,需设计相应的控制算法来保证整体系统的稳定。对于柔性捕获,飞网捕获的重点在于研究飞网的动力学模型及飞网捕获过程中的控制。鱼叉捕获需要考虑碰撞动力学模型,以及如何避免鱼叉穿透目标时可能产生新碎片。
4.5 遥操作技术
遥操作是通过地面控制台来遥控在轨捕获系统,在人的决策下完成捕获任务。由于非合作目标捕获过程复杂程度高,目前尚未具备完全自主化的捕获,故采用遥操作方式来完成空间的测量、交会和捕获仍是当前的主要方式。目前,遥操作技术存在的主要问题是地面与太空的通信滞后造成的时延问题,这对超近距离的精细操作造成了极大的挑战。为确保地面对太空捕获系统的准确控制,时延问题是目前必须突破的技术难关。
5 非合作目标捕获发展趋势
1)目前,国内外提出的非合作目标捕获方法基本上处于理论研究或者地面试验阶段,并未实现太空应用。因此,国外研究机构下一步的发展计划是进行太空实验,以验证当前捕获方法的可行性。我国由于在这方面起步较晚,故下一步应加大投入力度,进行相关研究。
2)国内外提出的捕获方法基本上依赖于地面遥操作,但在未来的实际应用中,由于地面遥操作会有较大的时间延迟,很可能导致捕获失败。随着人工智能的发展,未来的捕获方法也将趋于智能化,如自主观测跟踪目标、自主捕获等。
3)随着商业航天的发展,非合作目标捕获领域未来也将商业化。之前DARPA、ESA等机构所提出的研究项目中已经明确了在轨服务和太空清理的商业化进程。我国近几年也出现了多家民营火箭公司,或许未来我国非合作目标领域的捕获技术也会实现商业化,因此具有非常广阔的发展前景。
6 结论
空间非合作目标捕获技术在太空垃圾清理、在轨服务等方面有着巨大的应用价值。发展非合作目标捕获技术有助于缓解轨道资源紧张、降低航天技术成本,未来将是航天领域的研究热点。国外在该领域发展较早,取得了较大发展,并已将太空演示计划提上了日程。我国在非合作目标捕获领域的研究起步较晚,相比欧美国家仍有不小差距。近年来,在国家的大力支持下,我国的研究发展迅猛,与欧美国家的差距正在逐渐减小,相信在不远的将来必然会达到国际先进水平。