水下基准安装柱受力形变分析与仿真∗
2020-07-09
(91388部队 湛江 524022)
1 引言
水声跟踪定位系统[1~5]是对水下声源目标进行测量定位的设备,定位精度是其主要的技术指标。定位标定系统提供标校精确的声源基准位置,对水声跟踪定位系统的定位精度进行计量检测,因而水下基准换能器位置的标校精度成为定位标定系统的主要技术指标。水下基准换能器安装柱在舰船航行时,在水的阻力作用下会发生变形,其模型属于小直径圆柱的流体动力问题[6~11],本文分析其受力情况和形变情况,仿真分析了不同工况下安装柱的受力形变,为工程应用上的误差控制提供了可靠的理论支持。
2 模型的建立
水下基准换能器安装于测量船船底升降机构安装柱底端,标校试验开始时,打开船底闸阀,升降机构降到船体外指定深度处[9],如图1所示。Vs为测量船的航速,Vw为流速,L2为船体外安装柱的长度,L1为水下基准换能器的深度。

图1 水下基准安装示意图
3 安装柱的载荷分析
3.1 修正的morison公式[6~12]
首先分析静止状态下的安装柱在海流作用下的受力满足morison公式:

式中f为安装柱单位长度的受力,r为海水密度,D为安装柱直径,Vw为海流的流速,Cd,Cm分别为拖曳系数和惯性系数。
而事实上我们通常考察的是运动目标,安装柱的运动速度Vs等于测量船的航速,得到修正的mor⁃ison公式为

3.2 线性波理论分析
根据线性波理论,以升降机构安装柱在船底的固定点为原点,安装柱中心线向上为Z轴正向,垂直于安装柱中心线的向东的水平线为X轴正向,建立直角坐标系,于是有:

式中:H为波高,w为角频率,d为深度,k为波数,l为波长。
3.3 载荷分析
根据线性波理论,结合修正的morison公式,可以求出升降机构安装柱在水中受到的总作用力。
对式(3)求导并令x=0得:

由式(2)可知安装柱上某点受到的力为

安装柱在水中受到的总作用力为

其中惯性力FI和粘性阻力FD分别为

4 安装柱受力形变分析
安装柱通过升降机构伸出船底成为一个悬臂,其受力如图2所示。
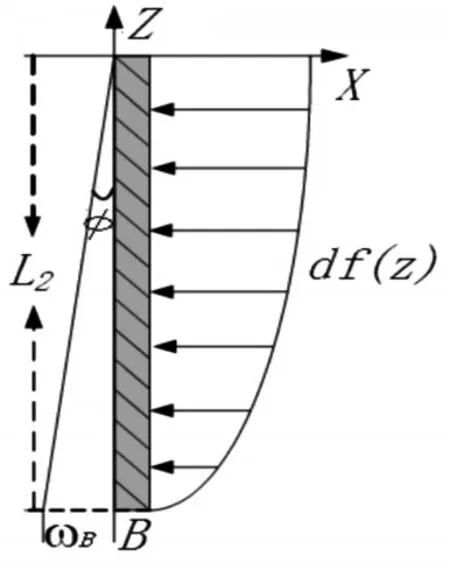
图2 安装柱受力形变示意图
由图2可知,在距离固定点O点z处,安装柱受到微载荷df(z)的作用,其形变位移为

上式中:E为弹性模量,J为截面惯性矩,D、D内分别为安装柱的外径和内径。则可以求得安装柱自由端的扰曲:

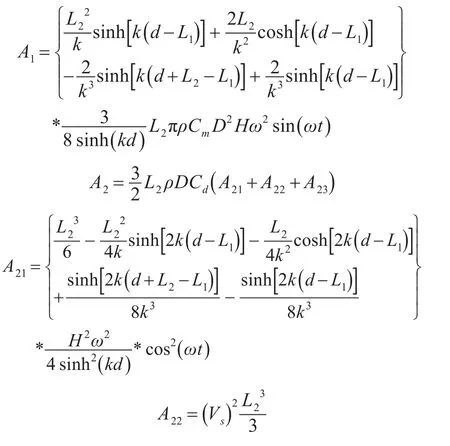
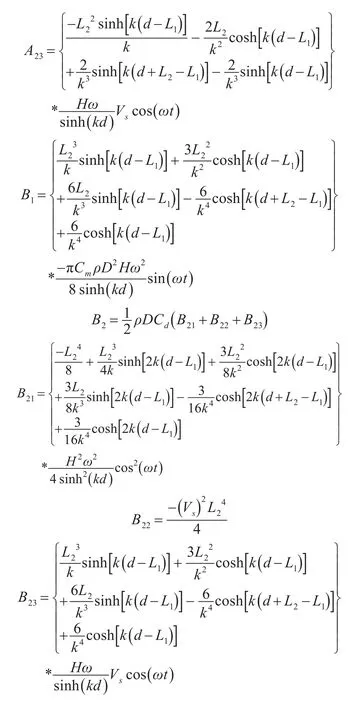
其中:
5 仿真结果分析

图3 舰船航速6节,吃水6m,安装柱的形变位移仿真
安装柱的型号根据船型、适应工况的不同而设计,这里设定安装柱的外径为100mm,内径为80mm,船底到气缸固定点距离650mm,测量船吃水大约4m~6m,平均工作水深500m,图3~5是仿真在不同工况下,安装柱形变位移与柱的长度的关系。
图3是舰船航速6节,吃水6m的情况仿真;图4是舰船航速4节,吃水6m的情况;图5是舰船航速4节,吃水10m的情况。
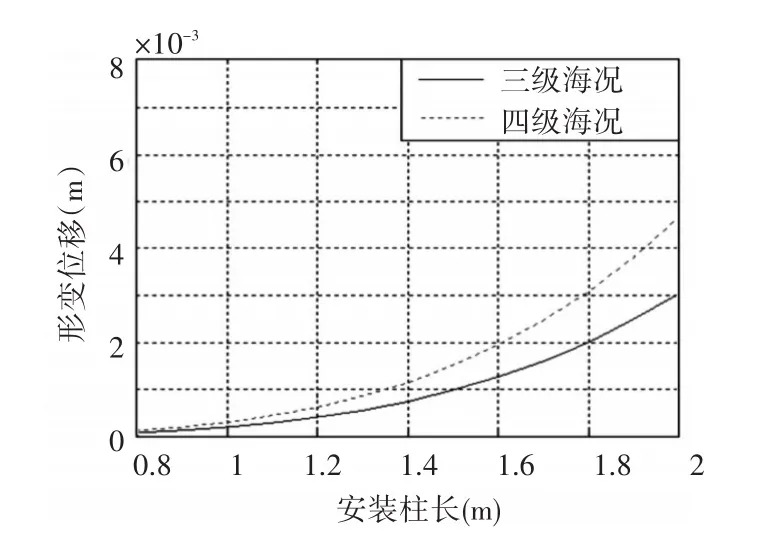
图4 舰船航速4节,吃水6m,安装柱的形变位移仿真

图5 舰船航速4节,吃水10m,安装柱的形变位移仿真
6 结语
安装柱的形变是影响高精度定位标定系统水下基准定位误差的主要因素之一,本文建立了水下基准安装柱模型,并对其进行了载荷分析、形变分析,仿真分析了不同工况下安装柱的受力形变位移,为工程应用上的误差控制提供了可靠的理论支持。
