一种基于深度学习的机动目标态势快速判断方法∗
2020-07-09杨金鸿皇甫立
杨金鸿 皇甫立 熊 璋 张 哲 许 松 王 蓬
(1.中国船舶工业系统工程研究院 北京 100094)(2.北京航空航天大学 北京 100191)
1 引言
目标运动态势包括目标运动速度、航向、距离等信息,是进行目标意图推理、行动方案制定、武器控制的重要依据[1]。在海战场上,目标态势判断的准确性和快速性直接影响最终作战效果。在接敌阶段,目标运动态势需要依靠人为经验进行粗略判断,其结果具有一定的主观性,准确性往往较低。在目标跟踪阶段,一般采用被动式探测手段获得目标运动要素[2]。但是,当目标发现我方时,往往会进行变速、变向等战术机动,造成传统的目标运动分析方法失效。传统的目标运动分析法在目标发生机动后通常需要待目标再次保持匀速直航后重新进行计算,此过程需要持续一段时间[3],战场环境的瞬息万变往往会因此延误战机。
相比于目标精确要素的计算,在短时间内快速获得目标的概略要素,对于舰船战术机动、武器攻击和控制是非常必要的。由于现代武器系统的发展,在攻击阶段,武器通常具备制导功能,在仅知道目标概略态势的情况下,即可对目标进行攻击[4~5]。我方的很多战术行动不必过分依赖于精确的目标运动要素,如威胁判断、武器远程快攻等[6]。此外,在防御阶段,根据目标概略态势即可提前制定防御方案。根据目标纯方位可观测性定理,在我方机动一次的情况下,获得的方位序列可以唯一确定目标态势,即不同的目标态势对应不同的目标方位序列[7],因此可以根据方位序列判断目标概略态势。神经网络能够自主学习网络参数,具有较强的拟合能力,朱丰提出一种基于径向基神经网络的态势判断方法[8],利用三层概率型径向基神经网络判断目标概略态势,取得了较好的效果,但是该方法只能适用于目标匀速直航的情况。当目标转向机动时,目标态势与方位序列之间的映射关系则更加复杂,涉及的目标运动要素主要包括机动前航向、航速、距离以及机动时刻和机动转向等。传统的确定性数学模型难以刻画方位序列与运动态势之间复杂的不确定关系。为了保证我方隐蔽快攻和提前防御,需要采用具有更强拟合能力的学习模型,挖掘方位序列分布与运动态势之间的关联模式。
近年来提出的深度学习方法是一种具备多隐藏层的感知器模型,具有强大的非线性拟合能力,高度逼近非线性系统,能够通过组合底层特征形成更高层抽象的语义表示,发现数据分布规律,预测样本类别。目前深度网络在图像识别、语音识别、机器翻译等领域得到广泛应用,并取得较好的效果[9]。利用观测器量测的一系列方位值确定目标运动参数是一个经典的非线性估计问题[10~11]。鉴于深度网络强大的非线性拟合能力,本文提出一种基于深度网络的机动目标态势快速判断方法。该深度网络以目标方位序列、我方运动工况作为输入,以目标运动概略态势作为输出,利用梯度下降法最小化预测值与真实值之间的损失,学习深度网络模型,刻画方位序列与目标运动态势之间的映射关系。该方法不仅可以判断目标机动前的运动要素,也可以判断目标的机动时刻、目标机动的角速度以及距离。仿真实验结果表明该方法具有较强的目标运动要素的快速判断能力。
2 目标态势建模
在已知我方航向、航速的情况下,目标方位序列取决于目标相对于我方的舷角、速度和距离。根据纯方位目标运动状态可观测原理,在我方做一次机动的条件下,目标相对于我方的每种运动态势对应着唯一方位序列[12~13]。反之,在已知我方机动航向和航速的前提下,目标的方位序列对应着唯一的态势,既目标相对于我方的舷角、速度和距离,即可以通过目标的方位序列反演得到目标的运动态势[14~15]。
根据具体战术需要将目标运动态势划分为不同的情况,本文以1323种情况为例展开研究。目标航向和目标舷角有关,设定目标舷角为大、中、小 3个等级,其中心值分别为75°、45°和15°。设定初始距离为大、中、小3个等级,其中心值分别为108链、83链和58链。设定目标速度为高、中、低3个等级,其中心值分别为15节、25节、35节。设目标机动转向角速度分为高速左转、中速左转、低速左转、高速右转、中速右转、低速右转、保持直航共7 个等级,其中心值分别是 12.5°/s、7.5°/s、3°/s、-12.5°/s、-7.5°/s、-3°/s、0°/s。设目标机动发生在某一分钟内,每10秒划分为一个等级,再加上保持直航的情况,共分为7个等级。航向、距离、速度、机动时刻、机动转向角速度不同值之间的组合可以得到3*3*3*7*7=1323个分类。在深度网络训练阶段,将在我方某种特定航行及机动方式下仿真得到的1323种目标的方位序列及我方运动要素信息作为深度网络的输入,将目标的1323种战场态势作为深度网络的输出,构建深度网络结构,通过仿真模拟得到的样本集对网络进行训练。在预测阶段,将观测器测量的目标方位序列及我方运动要素输入训练好的深度网络即可以快速得到目标的运动要素。
3 基于深度网络的机动目标态势快速判断
深度神经网络含有多个隐藏层,具有极强的逼近能力和分类能力。根据目标态势建模过程可知,机动目标态势快速判断可以转化成为基于深度学习的分类问题。为解决目标态势快速判断问题,首先在离线情况下利用仿真样本数据训练深度学习模型,在利用在线策略将探测的目标方位序列和我方运动要素输入模型,输出目标概率态势。
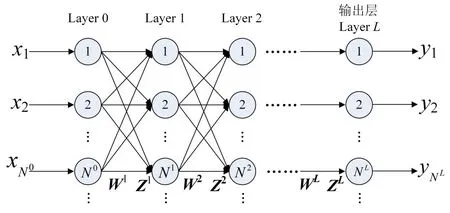
图1 深度网络结构
如图1所示为典型的深度网络结构,共含L层网络,其中第0层数输入层,第L层是输出层,第l(1≤l≤L-1)。设向量表示目标方位序列和我方运动要素,表示目标运动的真实要素。Wl表示l-1层结点和l层节点之间连接权值矩阵,表示l-1层结点j和l层节点i之间的链接权值。表示第l层网络第i个节点的输入。表示第l层网络第i个节点的输出。表示第l层迁移量。Y(X;W,b)为网络输出预测结果。设训练样本个数为M。
第l层网络第i个节点的输入表示如下:
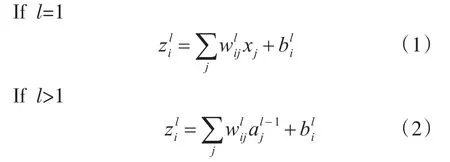
第l(1≤l<L)层网络第i个节点的输出表示如下:

第L层网络第i个节点的输出yi表示如下:

其中σ激励函数。损失函数表示预测结果与实际结果的差异,计算方式如下:

其中,

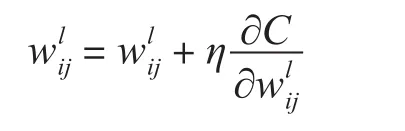
在深度网络的训练阶段,最小化样本的预测结果与实际结果之间的差异,采用梯度方法最小化C(X,W,b),求解W和b。
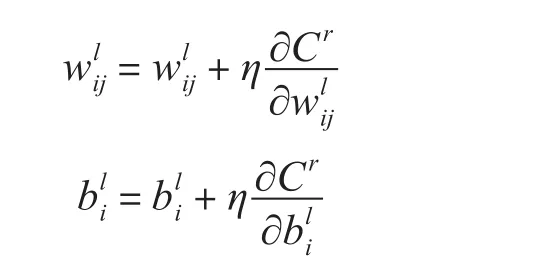
其中η表示学习率。
综上所述,基于深度学习的机动目标态势快速判断算法计算流程如下。
算法1:基于深度学习的机动目标态势快速判断算法
输入:损失函数 C(X,;W,b),激励函数σ,训练样本:,待预测样本{X1,X2,…,XK}
输出:预测目标概略态势{Y1,Y2,…,YK}
训练阶段:
1)随机初始化W,b;
2)计算损失函数值C(Xm;W,b),m=1,…,M;
4)固定,求解
5)如果收敛转至第6)步,否则跳转至第2)步。
测试阶段:
6)利用式(1)~式(2)计算样本预测值Y。
4 仿真实验
4.1 样本预处理
方位信息和运动要素的量纲不同,为平衡不同特征在训练过程中发挥的作用,充分利用每个特征的信息,获得更好的分类效果,需要对原始数据进行归一化处理。采用式(5)对目标方位序列和我方运动要素数据进行归一化处理:

4.2 深度网络结构设计
为了满足实际使用需要,以观测器探测的方位序列和我方运动要素序列为网络输入节点,内部含有多隐藏层,以机动目标运动要素为输出节点,具体深度网络结构设计如下。
1)根据目标可测原理,目标运动态势的确定不仅需要观测器探测的目标方位信息,还需要我方的运动工况。本文设置输入层含有781个单元。其中,第1~85单元的输入为我方观测器探测的方位信息,第86~170单元的输入为是我方航向信息,第171单元的输入是我方航速信息。
2)隐藏层数以及每层节点数目往往需要经验和实验测试确定,本实验设隐藏层数目为3,节点数目与输入层数据相同。
3)输出层有1323个神经元,与深度网络需要识别的机动目标态势的种类数相同。其中,由于样本的特征值和预测值在[0,1]区间,激励函数选择Sigmoid函数,计算方式如下:

4.3 仿真结果分析
为了验证本文方法的效果,对机动目标态势进行数字模拟仿真。设定目标航向采样间隔为5°。初始距离从100链~200链进行仿真,采样间隔为10链。目标速度从15节值35节进行仿真,采样间隔为 5 节。目标机动角速度从-15°/s~15°/s进行仿真,采样间隔为2.5°/s。目标机动发生在第60s~120s内,每2s采集一次。设我方的航向变化规律为:在前40s时,航向为0°;从第40s开始,航向开始由0°变为90°;从第50s开始,航向为90°;我方转向时的角速度为9°/s。为了验证该方法在机动目标态势快速判断中的效果,测试不同时间段态势判断准确率,从130s~190s,每10s测试一次。设每隔1s对目标方位进行采样,得到13230个灰类目标战场态势的方位序列。在样本中加入高斯白噪声,生成106条训练样本和103条测试样本。
使用训练样本训练网络模型,使用测试样本对算法进行验证。经测试,不同时间段机动目标要素判断准确率如图2所示。首先,图2结果表明,随着时间段的延长,态势判断越来越准确。指挥员可根据具体战场环境,综合考虑目标态势判断准确性和作战时机等要素,制定快速攻击或防御决策。其次,在第190s时,距离、速度、航向、机动时刻和机动角速度判断的准确率分别已达到0.925、0.941、0.912、0.821和0.860,该方法为战场快速攻击和防御提供了重要依据。
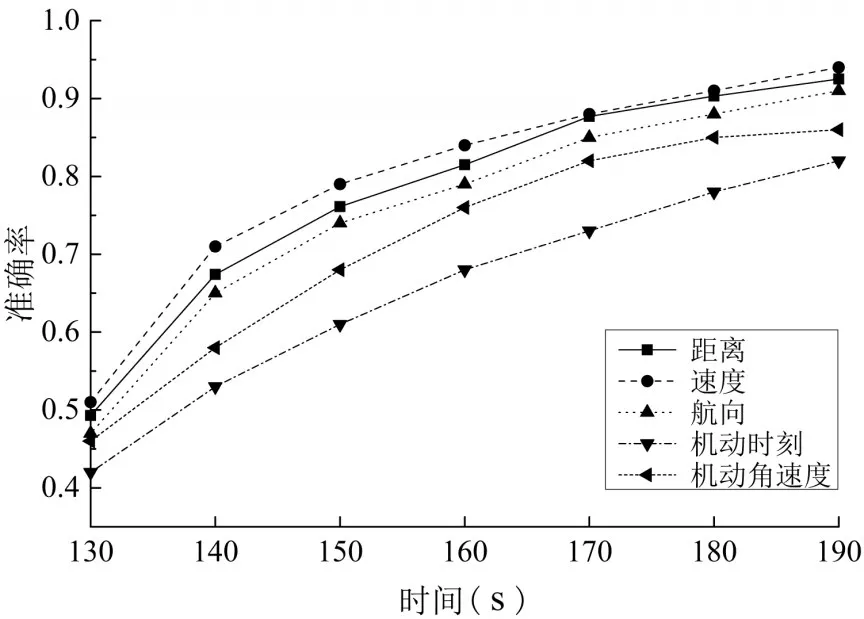
图2 不同时间段态势判断准确率
5 结语
针对目前已有目标态势判断时间较长并且难以应对目标机动的问题,提出一种基于深度学习的机动目标态势快速判断方法。该方法具有极强的非线性拟合能力,能够挖掘方位序列与目标运动态势之间的映射模式。该方法根据观测器探测的方位信息及我方运动要素快速判断机动目标的概略态势,与已有方法相比,态势分析的快速性得到提高,同时应对机动目标的能力也得到提升。仿真实验结果表明该方法能够有效地预测机动目标距离、航向、航速、机动时刻以及机动角速度等态势信息。
