光纤拖曳浮标设计与水动力数值分析*
2020-07-09薛耀辉
梁 权,李 莉,薛耀辉
(西安现代控制技术研究所, 西安 710065)
0 引言
光纤制导潜射巡飞侦察弹具有侦察、探测、通信等多任务能力,是未来潜艇前出作战必备的利器之一。它通过高强制导光纤与潜艇保持实时联络,可为水下航行潜艇提供周边海域岸、海、空目标态势,也可提供与卫星、飞机及UUV等协同作战的高速数据通信链路,大幅拓展潜艇在水下的大范围感知能力和体系协同作战能力[1-2]。作为光纤制导潜射巡飞侦察弹武器系统的重要组成部分,光纤拖曳浮标伴随潜艇水下作拖曳运动,可满足光纤缠绕、存储与释放要求,同时,可有效解决潜艇机动及艇身流场对近艇端光纤长时补偿放线安全的影响。
目前国内研究主要在传感器浮标、声呐浮标、雷达浮标、通信浮标[3-4]等方面,而对具有稳定放线功能的光纤拖曳浮标研究较少。国外研究以美、欧为主,包括“海上搜索者”[5]、“鸬鹚”[6]、“弹簧折刀”[7]等,但以上潜射巡飞弹与潜艇之间均依靠无线数据链进行通信,无类似的拖曳浮标系统。
文中先采用线导鱼雷[8]的基本设计方法,确定了光纤拖曳浮标的相关参数,然后再结合水下滑翔器[9]及高速拖体[10]设计时所涉及的主要参数,确定了光纤拖曳浮标的外形结构布局。设计了一种中低速拖曳条件下,相对升阻比高、横侧及纵向稳定性好、抗瞬时干扰能力强的光纤拖曳浮标,满足光纤水下长时稳定可靠释放的要求,解决了近艇端光纤补偿放线的安全性问题。利用Star CCM+软件,对光纤拖曳浮标进行了水动特性计算分析,确定了光纤拖曳浮标受到瞬时扰动后快速恢复到平衡姿态的条件。
1 光纤拖曳浮标外形结构设计
光纤拖曳浮标外形结构设计的重点,是保证其伴随潜艇航行时能以稳定的姿态长时可靠放线,消除潜艇机动及艇身流场对释放光纤安全的影响。总体构型需要在考虑光纤拖曳浮标长细比、浮重比以及拖点位置的基础上,具有相对较高的升阻比、姿态稳定性及抗瞬时干扰能力。光纤拖曳浮标在中低速拖曳运动时,需要一定的升力来保证其携带的光纤远离艇身。与线导鱼雷、水下滑翔器一样,其升力一部分来自于自身的正浮力,另一部分则由水平翼来提供。同时,通过鳍翼与水平翼配合产生的流体动力效应,保证航行时的姿态稳定性及抗瞬时干扰能力。
光纤拖曳浮标与弹体一起从潜艇鱼雷管中发射出去,依靠高强拖缆的作用力随潜艇在水下100~300 m航行。因此,文中先采用线导鱼雷的设计方法,确定光纤拖曳浮标的基本参数,然后再结合水下滑翔器及高速拖体的设计方法,优化光纤拖曳浮标相关的水动性能参数。为了对光纤拖曳浮标的外部构型进行定量描述,建立相应坐标系,如图1所示。以光纤拖曳浮标头部某点作为坐标原点O,光纤拖曳浮标纵轴指向尾部方向为X轴,对称面内垂直X轴且指向其左方的为Y轴,垂直于对称面且指向上方的为Z轴。
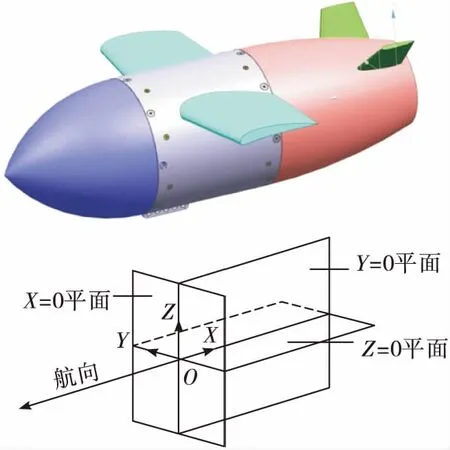
图1 坐标系示意图
1.1 光纤拖曳浮标头部外形
相对于空气,海水的运动粘性为0.001 003 kg/(m·s),密度为1 025 kg/m3是前者的约800倍。因此,水下航行体的头部整流外形设计[11-12]非常关键、要求更高。相对较高的海水密度,使得光纤拖曳浮标水下航行时的阻力很大,包括其外形迎流面产生的水动阻力以及浸润面产生的粘滞阻力。文中以升阻比为主要基础设计参数,分别对球锥形、尖锥形、半球形及椭球形整流罩进行了研究,计算分析了2 m/s、5 m/s、8 m/s来流速度下的升阻比大小。图2为4种整流罩的光纤拖曳浮标模型,图3为4型整流罩下的升阻比曲线。
从图3可以看出:光纤拖曳浮标中低速(小于5 m/s)运动时,尖锥形整流罩的升阻比明显低于其它3种,而在高速(大于等于5 m/s)时4型整流罩升阻比趋于一致,半球形整流罩的升阻比为4.25,是其中性能最优的。 考虑总体结构设计及加工工艺等,光纤拖曳浮标头部设计为球锥形整流罩外形。

图2 4种整流罩光纤拖曳浮标模型
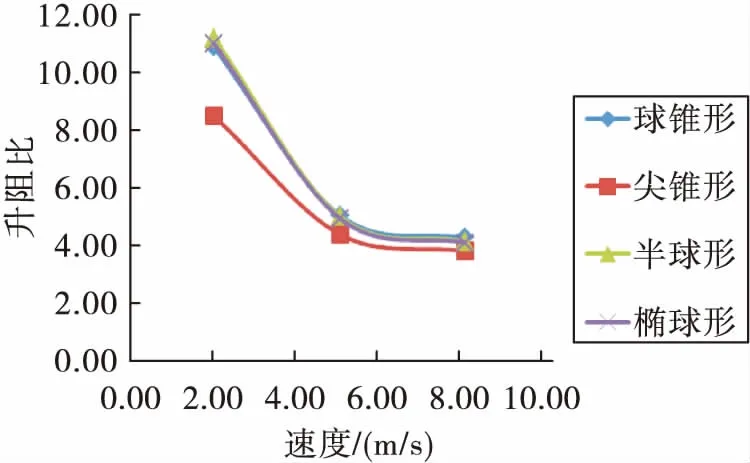
图3 四型整流罩升阻比曲线
1.2 光纤拖曳浮标翼板及翼板附体
光纤拖曳浮标要随潜艇作机动航行,同时,要具有一定的正浮力或升力,保证拖曳运动过程中姿态稳定,使得制导光纤能顺利从浮标尾部释放出来。因此,水平翼板及翼板附体的设计尤为重要。相关资料表明,平面翼板简单、易于加工、成本低廉,但相应的流体动力性能比曲面翼板差得多,易发生流动分离使阻力增大。而曲面翼板则相反,不易发生流动分离现象。目前,绝大多数空中飞行器及水下航行器的翼板均选择NACA系列翼型。文中光纤拖曳浮标水平翼板采用低速高升力的NACA4412翼型[13-14],翼展356 mm,翼根弦长120 mm,翼尖弦长70 mm。通过增加小翼、浮筒以及端板设计,提高光纤拖曳浮标航行过程中的横向稳定性,同时,通过翼板安装攻角设计,进一步提高其升阻比。
图4是NACA4412翼板及翼板附体模型,图5是NACA4412翼板及翼板附体0°攻角升阻比曲线,图6是NACA4412+小翼不同攻角的升阻比曲线。由此可见,NACA4412+小翼5°攻角的翼型,在5 m/s中速条件下其升阻比略高于其它3种情况。因此,光纤拖曳浮标翼板及翼板附体设计为NACA4412+小翼5°攻角的翼型。
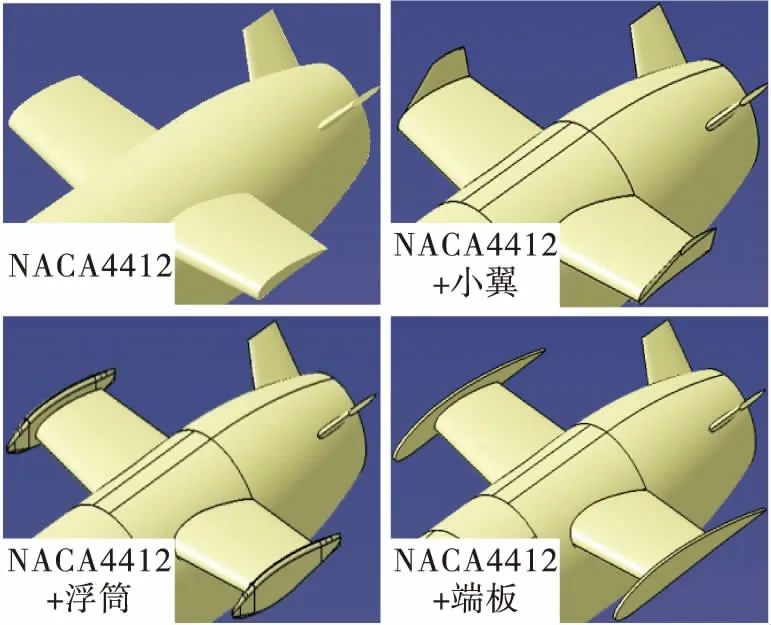
图4 NACA4412翼板及翼板附体

图5 NACA4412翼板及翼板附体0°攻角升阻比曲线
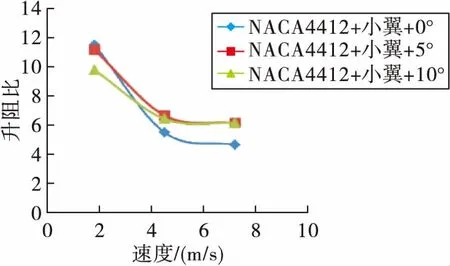
图6 NACA4412+小翼0°、5°、10°攻角的升阻比曲线
1.3 光纤拖曳浮标鳍翼
鳍翼设计要保证光纤拖曳浮标在最大速度及带攻角运动时具有足够的效率,并通过与翼板的配合产生流体动力,提供水下光纤拖曳浮标航向的稳定性,使光纤拖曳浮标具有一定的抗横滚扰动和偏航扰动能力。通过对比分析几种翼型的计算数据,文中鳍翼选用NACA0012翼型,采用V形布局,减小了光纤拖曳浮标的浸润面积、结构重量以及干扰阻力。
图7是二鳍翼V形布局、三鳍翼丄形布局、四鳍翼十形布局示意图,图8是3种鳍翼布局升阻比曲线。由此可见,光纤拖曳浮标二鳍翼V形布局的性能最优。
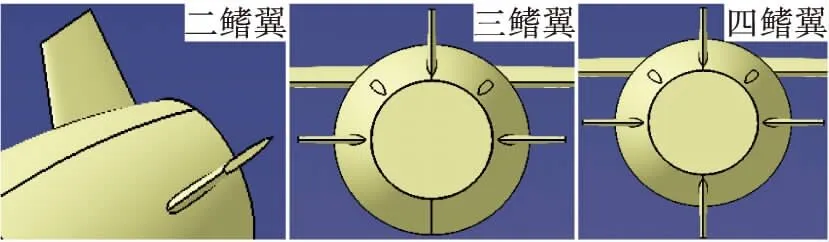
图7 二鳍翼V形、三鳍翼丄形、四鳍翼十形布局示意图
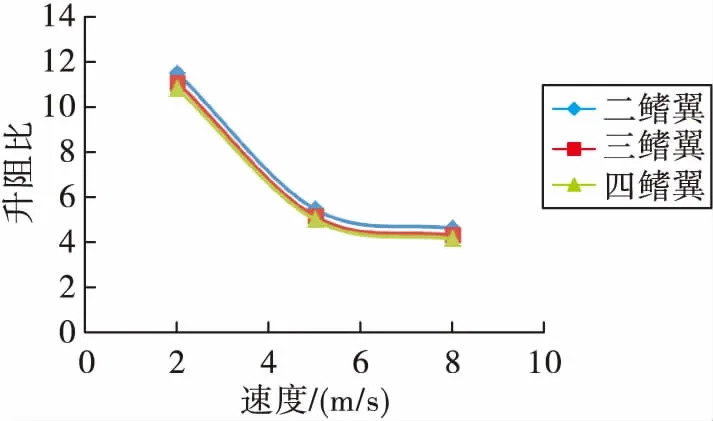
图8 光纤拖曳浮标3种鳍翼布局升阻比曲线
2 光纤拖曳浮标水动力性能计算与分析
2.1 光纤拖曳浮标水动力性能计算
光纤拖曳浮标最优的工作状态是正浮拖曳状态,因此,主要考虑正浮拖曳状态时的稳定性问题。如图9所示,建立光纤拖曳浮标受力分析图,坐标原点取在拖点上。
当外界使拖体有一个纵倾角干扰Δθ,去除后作用于拖体的纵倾力矩M与纵倾角θ的关系为:
M=-L(XAcosθ+ZAsinθ)-D(-XCsinθ+ZCcosθ)-W(XGcosθ-ZGsinθ)-F浮(XBcosθ-ZBsinθ)
(1)

(2)
当外界使拖体有一个横滚角干扰Δα,去除后作用于拖体的横滚力矩M与横滚角α的关系为:
M=-W·ZG·sinα+F浮·ZB·sinα
(3)

(4)

图10为光纤拖曳浮标以2 m/s速度航行时的姿态图。从图10可看出,偏航扰动不仅会带来偏航力矩的变化,也会带来横滚力矩的变化。偏航角变化引起的偏航力矩变化,称为航向稳定性位置导数。当拖体具有一定面积立尾时,该导数值必为负值。同时,由于拖点通常位于水动力作用中心前方,因此,带端板水平翼或翼梢小翼拖体的航向稳定性大大提高。横滚力矩对偏航角的导数,称为有效二面角系数。若水平翼展向上平行于Y轴且不带端板或小翼,则偏航角变化( 或侧漂)不会引起横滚力矩变化。若水平翼展向上具有二面角或平直水平翼带有端板/翼梢小翼,则偏航角变化会引起水动力对拖点横滚力矩的变化。因此,有效二面角系数越大横侧稳定性越好。对于纵向稳定性,只要拖力轴线处于水动力作用中心的上方,则浮标具备一定的恢复力矩,其大小主要取决于拖点距水动力作用中心的距离,靠前的拖点位置使浮标具有较好的纵向稳定性。
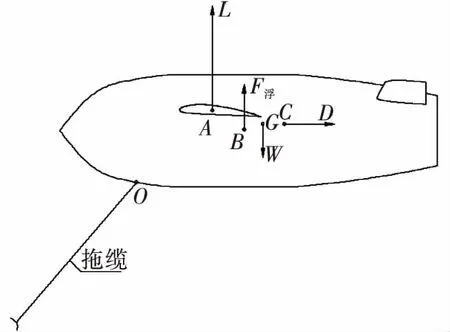
图9 光纤拖曳浮标受力分析图
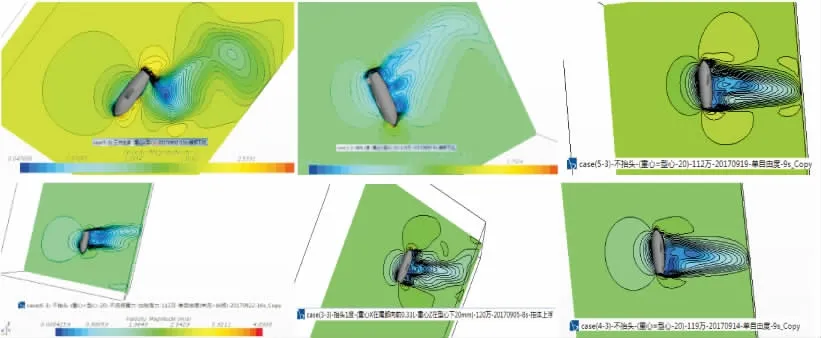
图10 光纤拖曳浮标正浮拖曳姿态云图
2.2 光纤拖曳浮标稳定性分析
由于光纤拖曳浮标自身不具备操纵性,其稳定性主要从受力平衡和静稳定性方面进行分析。与航空飞行器的运动相似,光纤拖曳浮标在水下的运动实质上是其受外力及力矩达到平衡状态的过程。光纤拖曳浮标在外力及力矩平衡的基础上,受到瞬时干扰后是否具有恢复到原来平衡状态的趋势,用静稳定性纵向力矩来表征。纵向力矩使得光纤拖曳浮标绕拖体轴线做抬头或低头转动,通常为状态变量和操纵变量的函数。

3 结论
文中完成了光纤拖曳浮标头部整流罩、水平翼板/翼板附件及背鳍的外形设计,并以升阻比为主要考量参数,确定了光纤拖曳浮标的总体构型。分析计算了光纤拖曳浮标的水动特性、稳定性及瞬时抗干扰性能,得到了光纤拖曳浮标瞬时扰动后快速恢复平衡的条件。结果表明,光纤拖曳浮标满足横侧及纵向稳定性要求,可以保证近艇端光纤长时间可靠补偿放线。文中的研究对于光纤制导潜射巡飞侦察弹工程研制具有一定的参考意义。
