降落伞超声速低动压高空开伞试验
2020-07-09王立武房冠辉李健戈嗣诚张兴宇
王立武 房冠辉 李健 戈嗣诚 张兴宇
(1 北京空间机电研究所,北京 100094)(2 中国航天科技集团有限公司航天进入、减速与着陆技术实验室,北京 100094)
0 引言
火星是地球的近邻行星,在太阳系内其自然环境与地球最为接近,每26个月左右便具有一次探测窗口,因此火星一直是人类深空探测的热点。火星大气成分以CO2为主,体积占比为95%,其表面大气密度约为地球的1%(0.01kg/m3),表面大气压力约为地球的0.6%(600Pa),重力加速度约为地球的3/8(3.7m/s2)[1]。
从20 世纪60年代开始,围绕火星是否存在生命的探测目标,人类开展了多次火星探测。根据形式的不同,火星探测可分为飞越、环绕及着陆探测,其中着陆探测是考察火星生命迹象最直接、最有效的方式:一方面由于火星具有大气环境,在着陆火星表面过程中采用降落伞减速是一种高效可行的技术途径;另一方面,火星的大气又十分稀薄,留给降落伞的减速高程十分有限,因此降落伞必须尽早在超声速、低动压条件下展开工作,以确保着陆环节的安全可靠[2]。美国、前苏联、欧空局均开展了多次火星着陆探测[3-8],其中美国在火星着陆探测上比较成功,已圆满成功完成8 次火星着陆探测。
火星进入、减速和着陆(Entry,Descent and Landing,EDL)过程十分复杂,需要面对多项技术挑战[9-10],而降落伞减速是火星EDL 过程中的关键环节,其工作性能直接影响探测器着陆过程的成败。超声速降落伞仿真技术难度较大[11-12],需要试验数据支撑才能获得准确仿真结果,因此为了保证火星着陆探测的高可靠实施,在飞行任务前必须要对降落伞的工作性能进行全面验证。美国在“海盗号”火星探测器飞行任务前,开展了10 余次的降落伞高空开伞试验[13-21],模拟火星开伞条件,对降落伞进行了充分验证,积累了丰富的试验数据,支撑美国后续各项火星着陆探测任务的成功实施。
我国将于近期实施首次火星探测任务,开展火星全球性、综合性的环绕探测和区域性的着陆及巡视探测。探测任务将一次实现“绕、落、巡”的工程目标,同时开展科学探测工作。2020年火星探测任务将是我国首次在地外天体应用降落伞减速技术,面临超声速、低动压等苛刻的开伞条件,降落伞减速系统需要使用多项新技术,在地球环境下的高空开伞试验可以接近火星真实开伞剖面,对降落伞开伞及工作性能进行充分验证。
本文对我国首次火星探测降落伞减速系统进行了介绍,根据任务特点提出了高空开伞试验需求,基于试验需求论证分析了两种高空开伞试验的优缺点,确定了探空火箭的高空开伞试验技术途径,对探空火箭试验方法进行了分析说明,最后对试验结果及取得的成果进行了介绍。
1 降落伞减速系统简介
我国首次火星探测任务降落伞减速系统主要有两个功能,一是减速,将探测器在预定高度由超声速减至亚声速;二是稳定探测器姿态。
降落伞可选的减速方案包括一级减速及两级减速。两级减速方案的优势是通过多级减速降低开伞载荷,但在质量方面没有优势,需要增加主伞开伞控制环节,系统更加复杂,为后续工作程序提供的留空时间较少。一级减速方案的优势是系统简单,工作环节少,为后续工作程序提供的留空时间相对较长,开伞载荷可接受,因此降落伞减速方案确定为一级减速,系统主要产品包括降落伞及弹伞筒(见图1)。降落伞伞型为超声速、低动压条件下开伞及稳定性能较好的盘缝带伞[22]。
进入火星过程中,降落伞减速系统的工作过程如图2 所示,探测器首先通过气动外形减速,到达预定开伞区域,降落伞将会弹出,在超声速、低动压条件下展开充气,对探测器进一步减速,为着陆创造有利条件。

图1 降落伞及弹伞筒产品装配状态Fig.1 The relative products of parachute system
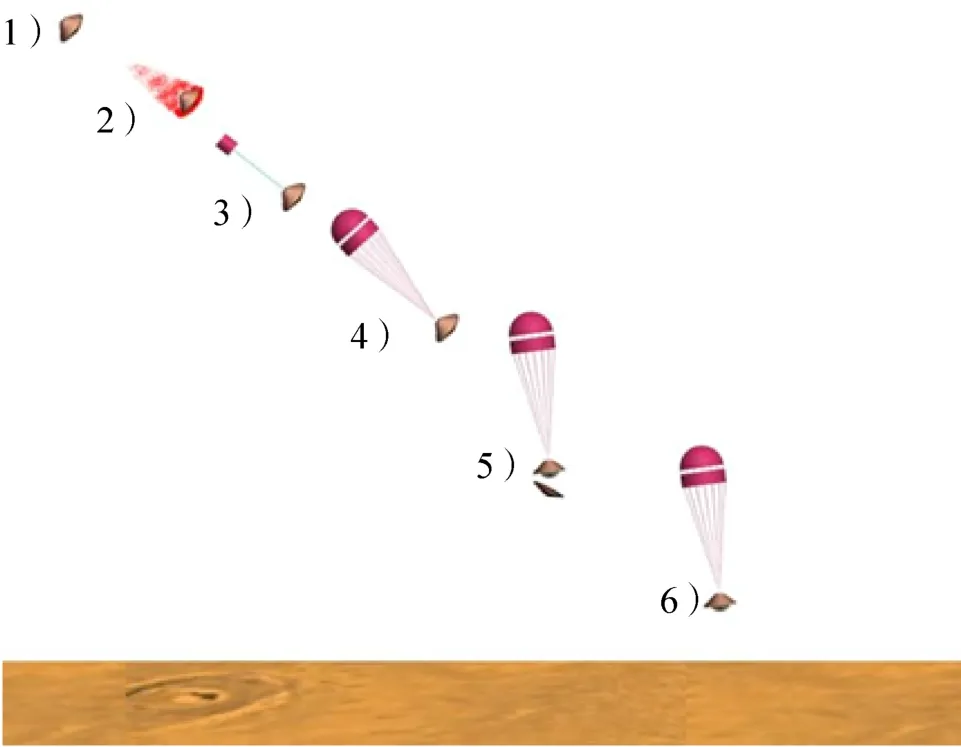
图2 降落伞减速工作流程Fig.2 The flow chart of parachute deceleration process
在超声速飞行过程中,降落伞会出现“呼吸”和高频颤振现象,易引起缝合部的剥离及伞衣的损伤;在低动压条件下,伞衣内外压差建立困难,开伞变得更加困难[23]。针对这些难点必须要创造真实条件进行模拟验证。对于神舟飞船、返回式卫星等地球返回任务,降落伞为亚声速开伞,在飞行任务前通过运输机空投即可模拟降落伞的真实工作剖面环境,对降落伞开伞过程及工作性能进行充分验证。然而地球大气与火星大气存在较大差异,在地球条件下较难模拟火星降落伞工作剖面环境,需要在地球30km 以上空域才能模拟火星降落伞的超声速、低动压开伞条件,试验系统十分复杂、技术难度巨大。
2 试验环境模拟分析
大气物理参数中大气密度以及大气温度对降落伞工作有相关性影响,两个参数直接关系到降落伞减速系统工作时的飞行速度、飞行马赫数、飞行动压等参数。火星大气密度远低于地球大气密度,在地球35km区域大气密度与火星大气密度量级相当(见图3)。火星大气温度大幅低于地球大气温度(见图4),导致火星大气声速与地球大气声速有较大区别(见图5),在地球35km 区域的大气声速为310m/s,而火星表面大气声速仅为223m/s。

图3 火星大气密度与地球大气密度Fig.3 The atmospheric density of Mars and Earth
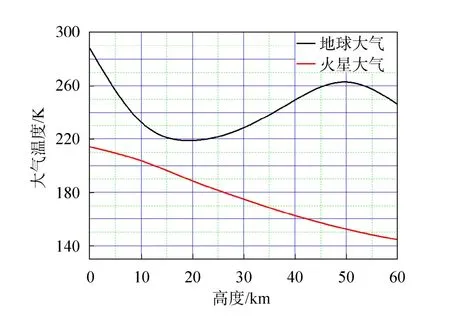
图4 火星大气温度与地球大气温度Fig.4 The atmospheric temperature of Mars and Earth
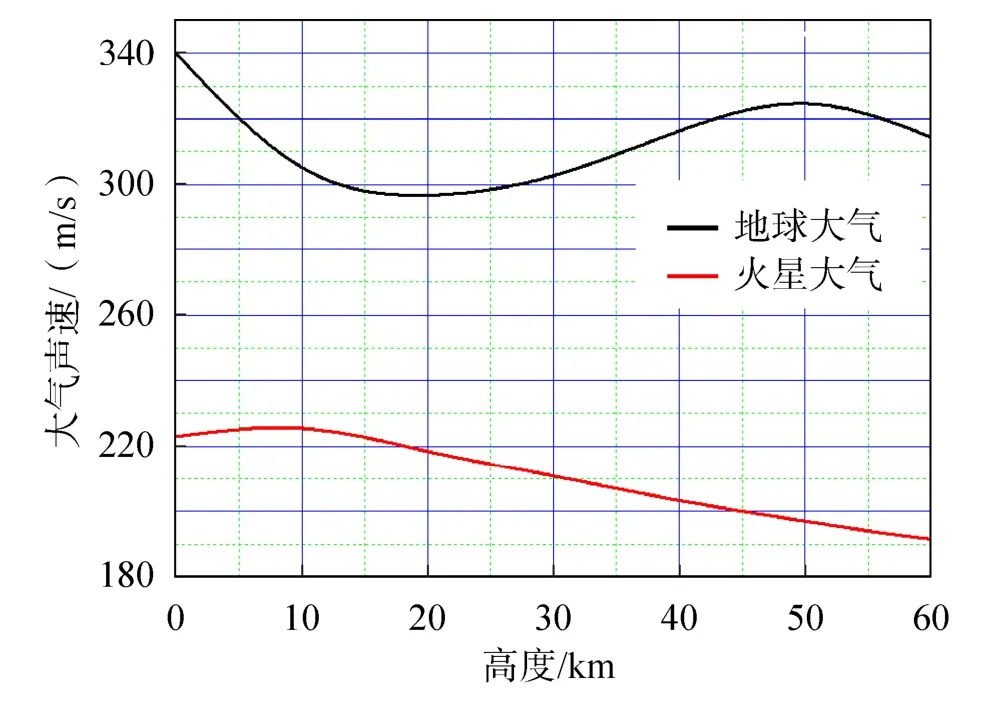
图5 火星大气声速与地球大气声速Fig.5 The atmospheric sonic speed of Mars and that of Earth
对于降落伞减速系统,飞行马赫数及飞行动压会影响降落伞超声速、低动压开伞性能以及超声速、低动压的减速工作特性,是降落伞减速系统的首要模拟条件。在准确模拟飞行马赫数后,由于大气声速的不同地球高空开伞试验模型的飞行速度约为火星探测器飞行速度的1.4 倍,较高的飞行速度对降落伞拉直过程是加严考核状态,大气密度及大气温度的影响已耦合在飞行马赫数和飞行动压中。
综上分析,在地球环境下需要保证模拟飞行马赫数和飞行动压两个参数。
3 试验技术途径选择分析
由于地球环境与火星环境的巨大差异,在地球条件下较难模拟火星超声速、低动压的开伞条件,进行性能验证。通过分析论证,在地球35~50km 左右高空可以模拟火星的开伞条件,但试验实施的难度大,可供选择的试验技术途径包括探空火箭平台高空开伞试验及气球平台高空开伞试验。
探空火箭平台高空开伞试验方案是将降落伞安装到火箭箭头位置,由探空火箭将降落伞送至高空,到达一定的高度后,箭头与探空火箭分离,自主惯性飞行,打开降落伞开伞通道,箭头速度及高度满足试验条件时,弹出降落伞进行超声速、低动压条件下的性能验证,图6 为探空火箭平台高空开伞试验过程示意。
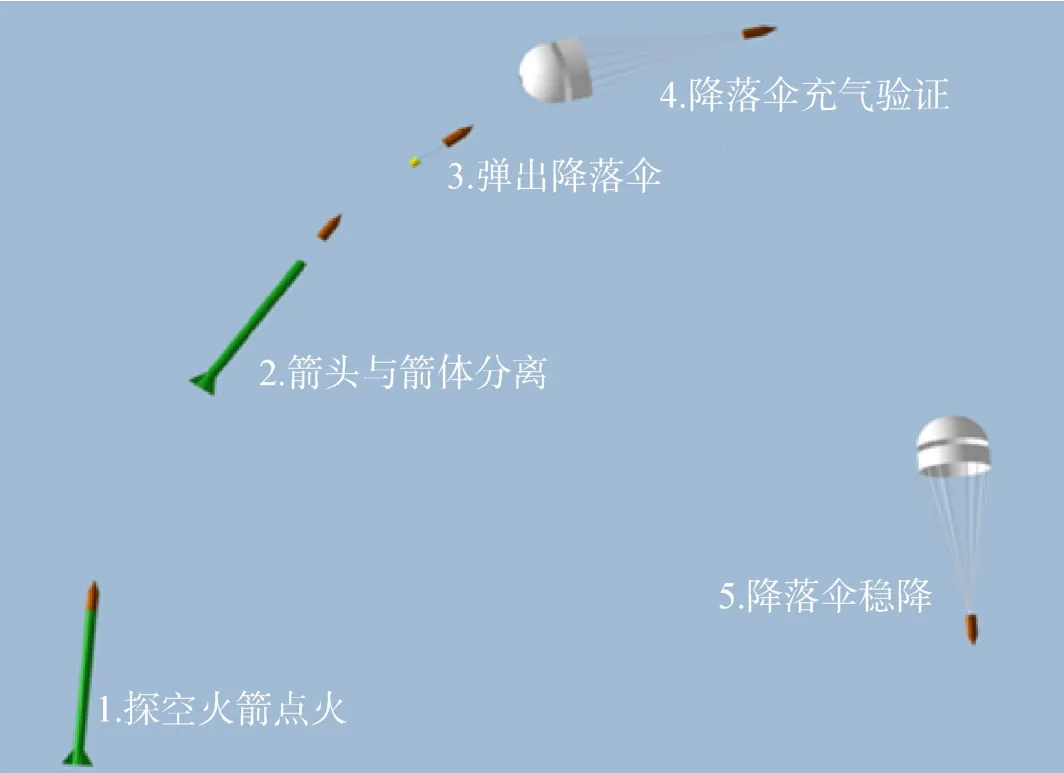
图6 探空火箭平台高空开伞试验过程示意Fig.6 The sketch map of the parachute deployment experiments of sounding rocket
气球平台高空开伞试验方案是通过氦气球将试验模型运至离地球表面35~50km 高空,试验模型释放自由下落一定安全距离后,加速发动机点火对试验模型进行短时加速,而后试验模型惯性飞行,当试验模型速度及高度满足试验条件时,弹出降落伞进行超声速、低密度、低动压条件下的性能验证。图7 为高空气球平台高空开伞试验过程示意。
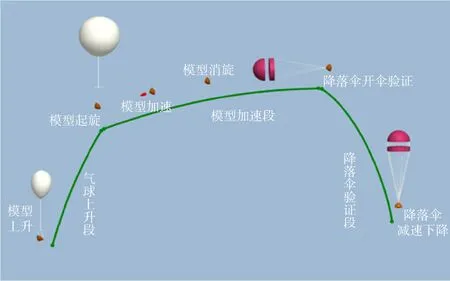
图7 高空气球平台高空开伞试验过程示意Fig.7 The sketch map of the parachute deployment experiments of high-attitude balloon
经过试验方案设计及国内相关技术调研研究,国内探空火箭技术比较成熟,探空火箭平台高空开伞试验方案可以利用成熟的探空火箭技术,技术成熟度高,试验成本相对较低。气球平台高空开伞试验方案试验模型可以模拟探测器的气动外形,但是该方案系统复杂,氦气球及试验模型系统均需要新研制,国内未开展过类似试验项目,涉及多项新技术,试验成本高。
根据综合比较结果,火星探测项目降落伞性能试验验证最终采用探空火箭平台高空开伞试验方案。
4 试验方案
试验系统由探空火箭、箭上测量设备、发射装置、测发控设备、地面遥测与外测设备组成。探空火箭采用固体发动机作为动力源,由箭体结构、动力系统、控制系统、电气系统、遥测设备等组成。火箭总长10m,直径750mm,起飞质量5t。箭上测量设备由2个加速度传感器、4个拉力传感器、2 套高清摄像机和2 套图像记录器组成,用于测量降落伞工作的力学环境,获取降落伞弹伞及开伞过程图像。发射装置是探空火箭发射时的支撑与导向机构,用于探空火箭的起竖、回转及定位定向。地面遥测与外测设备由遥测地面接收站、光电经纬仪、雷达等组成,遥测地面接收站用于完成探空火箭飞行过程中箭上遥测信号的接收、存储和处理,光电经纬仪及雷达用于探空火箭飞行过程外弹道测量。探空火箭平台高空开伞试验系统,如图8 所示。

图8 探空火箭平台高空开伞试验系统组成Fig.8 The system composition of the parachute deployment of sounding rocket
试验系统工作过程如图9 所示,每次试验前将降落伞开伞马赫数、动压等信息装定至探空火箭控制系统,探空火箭点火后按照设计弹道飞行,65s 左右达到头体分离条件,箭头与箭体分离,装有降落伞减速系统的箭头继续向上飞行,并实时判断飞行马赫数与动压,当满足开伞条件时(80s 左右),弹出降落伞,对超声速、低动压条件下对降落伞减速系统工作性能进行验证,最终降落伞携带箭头着陆。在此过程中通过图像测量设备、拉力传感器等对降落伞开伞过程、开伞载荷等关键信息进行记录。
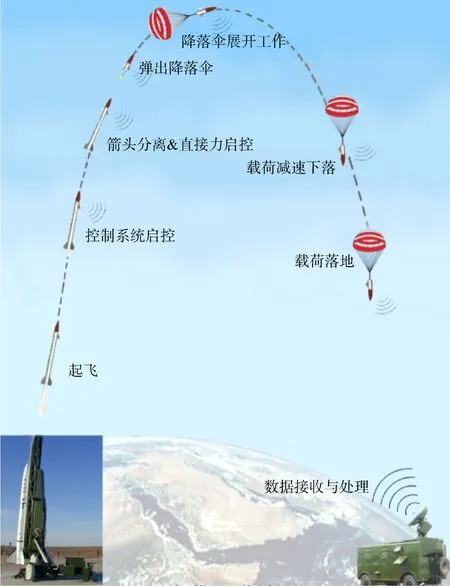
图9 探空火箭平台高空开伞试验过程示意Fig.9 The sketch map of the parachute deployment experiments process of sounding rocket
为充分验证降落伞减速系统性能,高空开伞试验设计了4个工况,见表1,分别对标称及高马赫数工况进行验证,其中工况1 和工况2 为重复性试验。探空火箭飞行过程中可以直接测量高度和速度信息,为便于开伞控制准确实施,将马赫数和动压范围转化为高度和速度区间,见图10。在飞行过程中,开伞控制策略将会保证开伞条件落入指定目标区间范围内,从而保证达到试验目标。

表1 四次试验开伞目标区域Tab.1 The parachute deployment objects of the four experiments
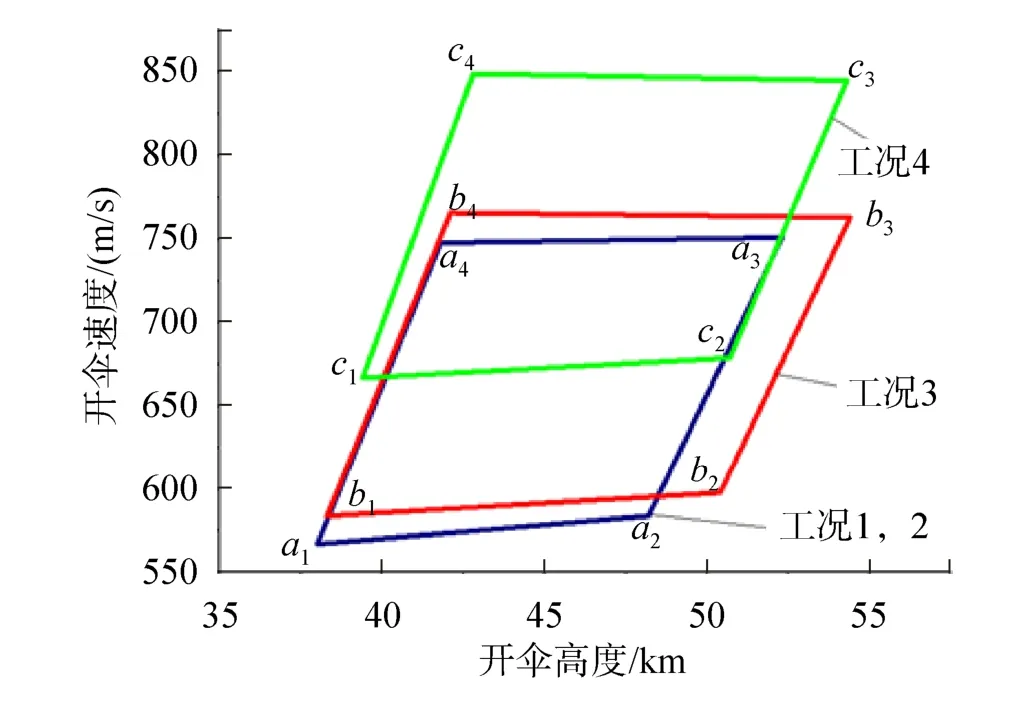
图10 四次试验开伞高度及速度区域Fig.10 The parachute deployment attitude and velocity region for the four experiments
5 试验结果
2018年4 月降落伞减速系统成功进行了4 次高空开伞试验,试验系统按照预定设计程序实施,降落伞减速系统工作正常,最大开伞马赫数达到2.5,实现了充分验证目标。同时降落伞开伞工作高度提升至54.3km(见图11),降落伞开伞速度达到809m/s(见图12),与以往10km 以内对流层使用空域相比,将降落伞使用空间扩展至地球临近空间,提升了降落伞减速系统应用范围,为地球临近空间留空任务提供了新的解决方案。

图11 四次试验高度时间曲线(工况1 与工况2 曲线重合)Fig.11 The attitude-time curve of the four experiment(condition 1 and condition 2 are overlapped)

图12 四次试验速度时间曲线(工况1 与工况2 曲线重合)Fig.12 The velocity-time curve of the four experiment(condition 1 and condition 2 are overlapped)
6 结束语
降落伞减速系统是火星着陆探测的关键环节,需要通过高空开伞试验对降落伞减速系统进行全面验证。本文首先对火星探测降落伞减速系统的难点进行了总结,对高空开伞试验验证的必要性进行了分析;其次对降落伞减速系统高空开伞试验的技术途径进行了分析比较,确定了探空火箭平台的成熟技术方案;最后对试验方案进行了说明,对试验实施结果进行了总结。
高空开伞试验的成功实施对降落伞减速系统进行了充分验证,获取了丰富的数据,支撑了火星着陆探测任务,并对其它任务降落伞的超声速低动压试验可以提供有益参考;同时将降落伞技术的应用领域扩展地球临近空间,可以为临近空间任务提供基于降落伞技术的解决方案。