煤矿井下智能化高效综采技术的应用研究
2020-07-07张洁
张 洁
(山西煤炭运销集团金山煤业有限公司, 山西 临汾 041000)
引言
煤炭资源作为一种重要的能源,为人类社会的发展进步提供巨大的助力,特别是随着以煤炭资源为依托的冶金、电力等行业的迅猛发展,整个社会对煤炭资源依旧保持着旺盛的需求,同时随着人力、运输成本的不断增加也对煤炭生产企业造成了极大的经济压力,因此需求不断提效、降成本的方法[1]。
煤矿井下的综采主要是由采煤机、刮板输送机及液压支架共同协调完成,在综采作业时由人工根据综采进度分别对采煤机、刮板输送机及液压支架的作业状况进行调整,受井下恶劣的作业环境影响,在实际调整时经常造成不同步,导致综采作业停止,不仅对井下作业人员的安全造成了极大的威胁而且极大地影响了煤矿井下的作业效率,因此实现采煤机、刮板输送机及液压支架的联合控制,不仅可以降低井下作业人员的数量而且可以降低因人工调节不同步造成的综采作业间断,大幅提升井下作业的安全性和综采效率。
1 “三机”联动控制要求
采煤机在执行综采作业时需要确保落煤量能够满足刮板输送机的安全运量,避免出现空载或者过载运行,因此其在截割时的截割滚筒的转速和牵引速度需根据刮板输送机的运输能力综合设定,同时采煤机工作时的位置及牵引运动的方向及速度也直接决定着液压支架的推溜位置和站位,采煤机牵引速度计算可表示为:

式中:vc为采煤机截割作业时的牵引速度;Qm为刮板输送机的额定输送能力;Kg为输送机运量的安全调节系数,常取1.2~1.4;m为综采面煤壁的厚度;S为截割滚筒截齿的截割深度;C为煤炭的采出率,取0.94;γ为煤炭的容重。
液压支架在工作时需根据监测到的采煤机的坐标进行相应的调整,在需要移架时,根据与采煤机的相对位置,计算出需移动的方向和行程,由液压系统控制完成护帮板收放、移架、顶升及支护作业,在移动过程中为了避免出现漏支护导致的煤层顶板塌陷,需确保移位速度大于采煤机的牵引速度[2],即:

式中:vs为液压支架的移位速度;ns为同时移位的液压支架的数量;t为液压支架的追机速度;L为相邻液压支架的中心距。
刮板输送机在工作时的负载情况可通过对输送机驱动电机的工作电流的监测来体现,当电机工作电流超过额定工作电流的90%时可向采煤机发出过载信号,降低采煤机的综采速度,当工作电流低于额定工作电流的70%时,则向采煤机发出指令控制,采煤机加快综采效率确保刮板输送机的连续运量,从而确保刮板输送机工作时的可靠性和使用寿命。
2“三机”联动控制系统总体方案
煤矿井下采煤机、刮板输送机及液压支架联合控制系统中系统需要通过刮板输送机的负载状态信号不断地调整采煤机的截割速度和牵引速度[3],根据监测到的采煤机的综采位置,对相应位置的液压支架的工作状态进行调整,联合控制系统的总体结构如下页图1所示。
为简化系统结构,增加控制的精确性和反应速度,本文将该联合控制系统分为设备层、监控层及管理层三个部分,设备层是指布置在采煤机、刮板输送机、液压支架上的各类传感器设备及各类的信息传输和发送设备,其主要用于将各机械设备的运行状态实时传输到联合控制中心,完成同步协调。监控层主要由不间断电源、联动控制设备及监控系统组成,主要用于对“三机”的位置状态进行监测,以便实现自动和远程联动控制,管理层主要是由设置在地面管理中心的各类储存、显示及控制设备组成,用于远程对井下各设备的运行状态进行监测和控制。
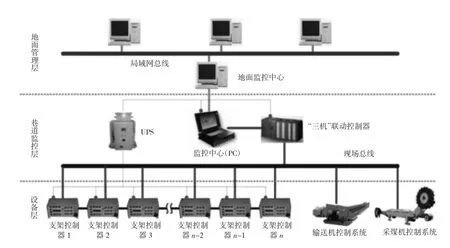
图1 “三机”联动控制系统总体结构示意图
3 采煤机联合控制技术
在联合控制系统中对采煤机的控制主要包括对截割负荷(控制落煤速度)和牵引速度的控制,牵引速度包括在巷道内的左侧牵引和右侧牵引,在工作时系统监控设备将刮板输送机的负载信息、采煤机的牵引速度及方向传递给控制中心,系统控制器根据预设的分析软件的分析,发出对采煤机牵引速度调整的信号,同时通过采煤机的变频调速系统确保采煤机截割负荷满足调控要求,在联合控制系统中采煤机的联动工作过程如图2所示。
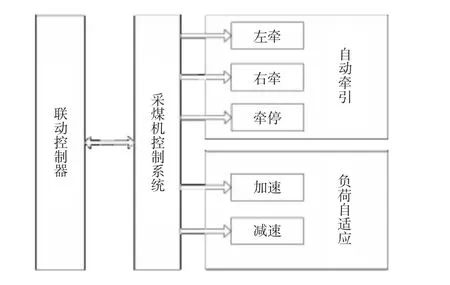
图2 采煤机的联动工作逻辑示意图
4 液压支架电液控制技术
在联合控制系统中,系统将监控到的采煤机工作时的位置和位移信息传递给逻辑控制系统,逻辑控制系统根据采煤机的工作状态及下一步的位移情况,控制相应位置的液压支架进行支护、收撤、移位作业,液压支架的各种动作的执行主要是通过电液控制系统完成的[4],其结构如图3所示。
液压支架各种动作的执行主要是由支架控制器进行控制的,支架控制器之间利用CAN数据总线实现连接,在工作时通过红外传感器进一步确认采煤机的相对站位,通过各种压力和位移传感器实现对液压支架动作执行情况的监控,实现对液压支架工作状态的联合控制,隔离耦合器主要是将不同控制器的电源相互隔离,降低工作过程中对相邻控制系统的电磁干扰,确保控制系统动作执行的可靠性和灵敏性。
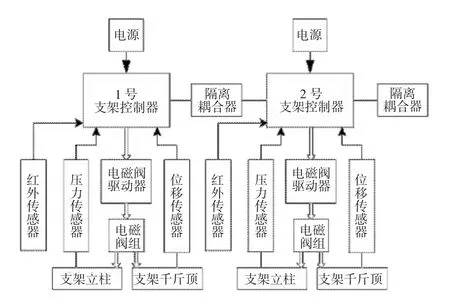
图3 液压支架电液控制系统结构示意图
5 联合控制系统通信技术
在联合控制系统中,需要同时控制的机械设备多,动作复杂,在同一时刻需传递的各类数据信息量大,对各类数据信息数据的精确性要求较高,因此开发了新的联合控制通信技术,其结构原理如图4所示。
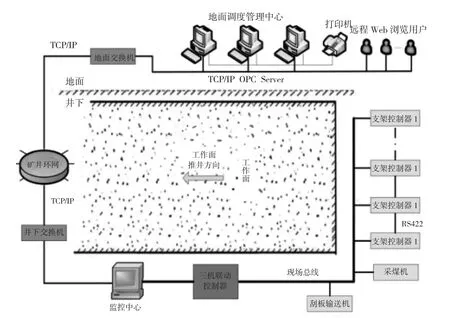
图4 联合通信系统结构示意图
该联合通信系统主要包括井下联合通信系统和地面管理通信系统,井下系统主要用于对现场监测数据的传输及上传,完成各控制设备之间的数据通信和控制,地面管理通信系统通过ICP通信协议与井下通信系统连接,完成地面和井下的数据信息交互。
6 结语
根据煤矿井下刮板输送机、采煤机、液压支架的工作情况以及实际工作经验提出的采煤机、刮板输送机及液压支架联动的控制要求和联合控制系统,极大提升了煤矿井下综采面工作的自动化程度,不仅实现了井下作业少人化、智能化的要求,而且极大地提升了煤矿井下的综采效率,对煤矿生产企业提升综采作业经济性具有巨大的意义。