差分进化算法在数字PID参数整定中的应用
2020-07-06孟亚男
孟亚男,冯 兼
(吉林化工学院 信息与控制工程学院,吉林 吉林 132022)
在工业过程控制中,PID控制策略应用十分广泛,它关系到控制系统性能的优劣[1].而PID控制系统最核心的部分,就是其控制参数.自PID算法问世以来,最普遍的问题就是如何优化整定其控制参数.根据发展阶段可以划分为常规整定和智能整定两大方法,在工业生产中常用的有经验法(试凑法)、衰减曲线法和响应曲线法.在实际生产中,大多数都是根据经验来进行整定.这难免会费时费力,造成一定程度上的浪费,降低生产效率.针对上述问题,介绍一种利用差分进化算法优化整定PID控制参数的方法,仿真结果表明,该方法提高了参数的整定速度和准确度,基本达到了控制的要求.
1 数字式PID控制原理
数字PID是利用计算机软件程序来模拟PID控制算法,数字控制属于采样控制,需要对连续型PID算法做离散化处理.理论上满足采样周期足够短,则离散型控制算法便可以近似处理为连续型控制算法,使控制过程更加灵活实用.经离散化处理后,连续型PID算法各部分可分别用式(1)、(2)、(3)近似替代.
t≈kT,
(1)
(2)
(3)
则离散PID表达可写成式(4)形式:
(4)

数字PID主要分为增量式算法和位置式算法,理论上二者是相同的,但当进行数字量化处理后,二者的实现过程会有所差异.以增量式为例,虽然可以降低误动作的影响,但由于模型的限制,可能会引起较为严重的方法误差,积累到一定程度时会使系统输出严重偏离期望值.综合考虑,本文选用位置型PID算法,方框图如图1所示.

图1 位置式PID控制系统方框图
2 差分进化算法
2.1 基本原理
差分进化算法(DE)属于全局优化算法范畴,其进化流程与遗传算法相似,都是以种群进化为基础的并行搜索算法[2],图2为DE算法基本流程图[3].一般需要先给定初始种群,计算群体个体适应度,进行初始化操作,再利用变异、交叉和选择等方式不断迭代更新种群,淘汰劣质个体,保留优质个体,有利于逼近全局最优解.
差分进化算法结构简单且易于实现,特别在复杂系统的参数优化问题上,DE算法的表现尤为突出,已经在工业控制等诸多领域得到了应用,实际效果较为满意.

图2 差分进化算法基本流程图
2.2 参数设置
DE算法参数较少,易于理解与实现,主要包括种群规模M、变异算子F和交叉算子CR.变异算子F控制个体向量的扰动程度,决定全局寻优的能力,一般为F=0.3~0.6;交叉算子CR反映了个体间信息交换的程度,一般为CR=0.6~0.9;种群规模M控制种群的多样性和收敛速率,一般为M=20~50.三个主要的参数没有固定取值,各个参数的选择要根据算法的优化目标适当选择[3].
3 基于差分进化算法的PID整定
3.1 目标函数的选取
将“快速—无超调”的性能指标作为系统优化整定的目标,在许多参数优化的系统中,性能指标函数一般都是以系统的e(t)为泛函的积分形式所建立的[4].根据所要达到的性能指标,选择合适的目标函数尤为重要.参考了IAE准则,选用式(5)作为性能指标.

(5)
上式中,以误差绝对值随时间的积分为基础,同时又引入了系统输入的平方项,由于要求所优化整定的系统无超调,采用惩罚功能,即当r(t)-y(t)=e(t)<0时进行优化,将超调量作为最优控制指标的一项,则式(5)可改写为式(6)[5-7].
(6)
式中,e(t)为系统误差;u(t)为控制器输出;w1、w2和w3为权值.
3.2 Matlab实现差分进化算法PID整定
基于以上原理,利用Matlab编写M函数文件进行实验.被控对象的选择如式(7)所示,令系统采样时间Ts=0.001 s,将式(7)转化成式(8)的差分方程形式;考虑到“快速—无超调”的控制要求,采用PID控制方案[8],输入阶跃响应yd=1,群体规模M=50,令F=1.7,CR=0.8.预先设置Kp∈[0,10],Ki∈[0,1],Kd∈[0,2],有利于全局最优解的搜寻,降低盲目性,w1=0.999,w2=0.001,w3=10.取进化代数G为50.
(7)
y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_61+num(3)*u_62,
(8)
vi,G+1=ab,G+F·(ar1,G-ar2,G),
(9)
变异算子的程序实现:从种群中随机取个体ar1,G、ar2,G和ar3,G,且b≠r1≠r2≠r3,以任意整数ri表示个体序号;则变异过程可写成式(9)形式.最优个体用ab,G表示,产生的新个体用vi,G+1表示.则Matlab程序实现如下:
for i=1:N
a=ai(i,:);
n1=1;n2=1;n3=1;n4=1;
while(n1==n2||n1==n3||n2==n3||n1==i||n2==i||n3==i||n4==i ||n1==n4||n2==n4||n3==n4 )
n1=ceil(size * rand(1));n2=ceil(size * rand(1));
n3=ceil(size * rand(1));n4=ceil(size * rand(1));
end
v(i,:)=BestS+F*(ai(n1,:)-ai(n2,:));
(10)
交叉算子的程序实现:交叉操作是为了维持群体的多样性,有利于最优解的搜索.具体操作参考式(10),式中rand∈[0,1],则Matlab程序实现如下:
for j=1:1:CL
tempr=rand(1);
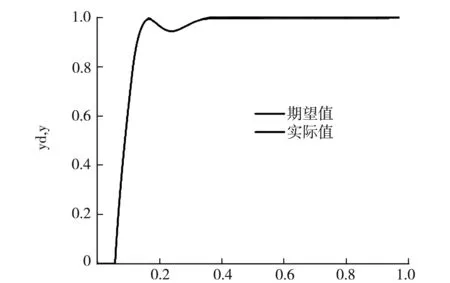
if(tempr u(i,j)=v(i,j); else u(i,j)=ai(i,j); end end (11) 选择算子的程序实现:根据式(11)可知,分别将ui,G和ai,G代入适应度函数求取适应值进行比较,保留较小的个体[9-11],则Matlab程序实现如下: if(Model_1(u(i,:),BsJ) ai(i,:)=u(i,:); end 经过差分进化算法优化整定后,得到实验结果Kp=1.298 2,Ki=0.251 5,Kd=0.052 0,性能指标J=99.897 6,并在Simulink环境搭建控制器模型进行仿真,图3为DE算法整定后的PID响应曲线,其上升时间约为0.35 s,调节时间约为0.486 s;图4和图5分别为性能指标函数J和控制参数的优化趋势曲线,从曲线可以得知,在进化代数为15之后趋于平稳;图6为Simulink仿真曲线,未经优化整定的曲线具有较大超调,约为11.72%,上升时间约为0.228 s,系统余差约为0.031.从仿真曲线中可以看出,采用差分进化算法进行参数整定,系统的各项性能指标较好,且基本达到了“快速—无超调”的目标,仿真结果较为理想. t/s图3 算法整定后PID响应曲线 t/s图4 性能指标函数J优化趋势 t/s图5 Kp、Ki、Kd优化整定趋势 t/s图6 Simulink仿真对比曲线 选用二阶滞后传递函数作为被控对象,在Matlab中编写DE算法进行PID参数的优化整定,并将优化后的数据应用在Simulink模型中,实现了基于差分进化算法整定PID参数的实验与仿真.结果表明,DE算法的收敛速度快、搜索精度高,提高了系统参数整定速度和准确度,基本能达到预期指标.
3.3 仿真结果



4 结 论