一种足型判别与鞋垫定制的系统设计
2020-07-04黄泽杭谢珩陈守恒郑晓楷杨哲沣张树斌蔡永巧
黄泽杭 谢珩 陈守恒 郑晓楷 杨哲沣 张树斌 蔡永巧


摘要:当足部受力不平衡时,就会患不同种类的足病,从而导致亚健康状态的产生,故足部足型的判别是一个治疗足病的依据。而足型判别对于鞋垫建模有指向意义,鞋垫定制对于亚健康信息研究具有重要作用。因此提出一种足型判别与鞋垫定制的系統设计,该系统设计可获取足部跟腱角的角度和足底接触面情况判别足型,可通过Kinect传感器采集足底深度数据逆向建模定制鞋垫模型,并可根据足型情况个性化修改鞋垫模型,缓解人受力不平衡的状态,达到人体健康的目的。该系统设计可以准确地对足型进行判别,并且建模出较为准确的鞋垫模型,具有可视化、操作简单、适用性强等优点。
关键词:足型判别;逆向建模;鞋垫定制
中图分类号:TP302.1 文献标识码:A
文章编号:1009-3044(2020)14-0020-03
1背景
足部为人体支撑体重,起力量传递的作用,当人受力不平衡时,就会患不同种类的足病,从而导致亚健康状态的产生,故足部足型的判别对于治疗足病的作用显得非常重要。而足型判别对于鞋垫建模有指向意义,鞋垫定制对于亚健康信息研究具有重要作用。目前,有许多应用广泛的足型判别方法,如根据鞋底不同位置的磨损程度进行判断足型,采用压力传感器根据压力分布情况进行判断足型,存在着较难直观地表现出足型信息的问题。在鞋垫建模方面,如喻伟才等人利用Power-SHAPE进行功能鞋垫的建模研究,李鑫等利用Rhino与Del-cam对鞋垫进行3D设计建模与分析,存在着建模过程烦琐且效果不佳的问题。基于现阶段的研究方案问题,提出一种足型判别与鞋垫定制的系统设计,该系统设计可以获取足部跟腱角的角度和足底接触面情况判别足型,通过足底数据逆向建模定制鞋垫模型,并可根据足型情况个性化修改鞋垫模型。
2系统设计方案
由于该系统是通过测量足底参数来进行判别与建模,因此需具备有以下几点要求:
1)根据足部跟腱角的角度判别足部是正常足还是内外翻;
2)根据足底与地面接触面判别足部是正常足、高弓足还是扁平足;
3)根据足底数据逆向建模定制鞋垫模型。
根据该系统设计的目的以及功能要求,自主设计了一款实验平台,加上摄像头和Kinect传感器的硬件系统,系统流程图如图1所示。
3基于跟腱角和足底接触面的足型判别方法研究
为了实现跟腱角和足底接触面的足型判别方法,该实验平台使用需要机械部分、硬件部分、软件部分三部分相结合,该判别方法的系统框图如图2所示。
实验平台采用高透度钢化玻璃仿真地面,当实验对象进行足型检测时,需光脚直立、两脚掌平行站在钢化玻璃上,置于脚后方的摄像头获取脚后跟、脚踝等部位图像来确定跟腱角,根据跟腱角的大小确定实验对象是否有内外翻以及内外翻程度;与此同时,脚底与钢化玻璃的接触面会实时被钢化玻璃下方的摄像头所获取,通过接触面与正常足接触面的比对,便可知道实验对象是否有扁平足或高弓足以及它们的程度。
3.1判别是否有内外翻
研究对象需要双脚自然分开直立站在上面,在背后离脚后跟10-20cm处放置一个摄像头用于观察跟腱角,当跟腱角小于180度时是内翻,当跟腱角大于180度时是外翻,当跟腱角等于180度时是正常足,如图2所示。
3.2判别是否有高弓足或扁平足
实验平台采用侧面打绿光的方式,如图3所示,光在玻璃内部传播,当人站上去之后玻璃与足底接触面发生紧密接触,绿光原来的传播轨迹被打乱,足底与玻璃的接触面受玻璃里面传播绿光的影响,足底与玻璃的接触面与玻璃其他部分相比会呈现出绿色,如图4所示。通过对绿色部分进行观察与正常足进行对比,就可以知道该足型是正常、高弓足还是扁平足。
4基于Kinect设备的逆向建模定制鞋垫模型方法研究
本系统的实验基于Win7系统开发的,实验中使用的是Ki-nect二代设备,Kinect驱动程序为Kincct for Windows SDK。用Kincct设备采集足底深度信息,通过Geomagic studio软件和Matlab软件对数据进行多次处理与建模完成鞋垫定制,流程图如图5所示。
4.1 Kinect设备的介绍与工作原理
Kinect传感器系统的基础是PrimeSense公司开发的光编码技术,其核心部件则是Ps1080系统级芯片。光编码技术是以结构光技术为基础的,利用具有三维纵深的编码对空间进行编码的技术。Kinect的CMOS红外传感器,是其区别与普通摄像头的关键装置。传感器以30帧/s的速度生成景深图,达到了实时3D的再现效果。
4.2采集足底深度信息
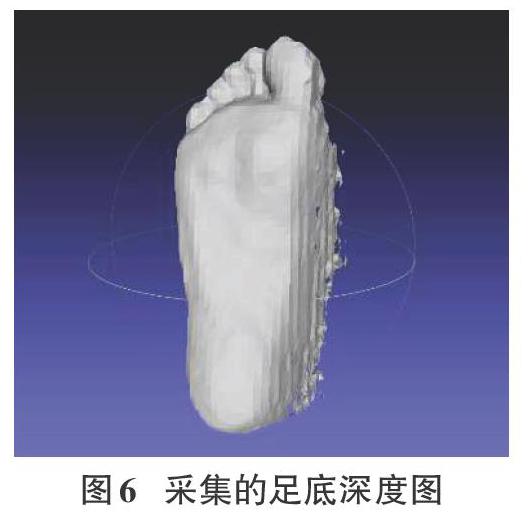
由于Kincct与被测物体之间的距离小于0.5m时,会出现被测物体失真等情况,故Kincct需要较大的扫描距离。实验平台的Kincct通过镜子折射,将镜像中心与红外发射器调整至同一水平面上,获取人体足底的深度信息,并导出足底深度信息的PLY文件,如图6所示。
4.3 3D点云数据预处理
因为Kincct设备采集的点云数据一般都有大量冗余数据并且存在噪音点,通过将足底深度信息的PLY文件导人Geo-magic studio软件,把不必要的点清理掉,通过封装得到高质量的多边形对象。运用的主要命令:
1)“点”→“选择”→“非连接项”
2)“点”→“选择”→“体外孤点”
3)“点”→“减少噪声”
4)“点”→“封装”
由于所扫描的足底深度信息为镜像信息,故先进行反镜像处理获得正确的足底深度信息;为了修复点云网格化过程出现的网格错误,使用软件工具对其进行修补;由于鞋垫数字化建模只需获取足底深度信息,故对足底以外的深度信息进行裁剪处理;为了鞋垫数字化建模的便利以及整体的效果,故对裁剪处理留下的缺口进行填充。
1)“多边形”→“修补”→“网格医生”
2)“多边形”→“修补”→“去除特征”
3)“多边形”→“修补”→“裁剪”
4)“多边形”→“修填孔”→“自动填充”
为了模拟人体实际的尺寸大小故对足底深度信息进行缩放处理,导出足底深度信息的PLY文件,为鞋垫数字化建模做好准备,如图7所示。
4.4 Matlab数字化建模
将预处理的足底深度信息的PLY文件导人Matlab软件进行建模,首先读取PLY文件数据,再通过一维插值算法得到足底轮廓,然后向足底平面进行投影得到鞋垫轮廓图。接着沿足底平面的法线方向进行拉伸,从而得到拟合足底曲面的鞋垫轮廓体,完成初步鞋垫的建模,如图8所示,再写人为鞋垫深度信息的PLY文件,为最终鞋垫生成做好准备。
4.5鞋垫模型进一步修正
将足底深度信息的PLY文件导人Geomagic studio软件对初步鞋垫进行封装、填充和减小噪声处理,得到定制鞋垫模型,并可定制鞋垫模型进行软变形处理改变足弓托等鞋垫信息参数,以满足不同情况的要求。随着3D打印技术的成熟发展,可将鞋垫模型通过3D打印机实现鞋垫制作与加工,亦有较好的效果。
5结束语
该论文设计了足型判别与鞋垫定制的系统,该系统利用实验平台的摄像头获取足部跟腱角的角度和足底接触面情况判别足型,通过实验平台的传感器获取足底深度数据逆向建模定制鞋垫模型,并可根据足型情况个性化修改鞋垫模型,缓解人受力不平衡的状态,达到人体健康的目的。经过初步的实验研究,得出结论:该系统设计具有一定的可行性,设计思路合理,基本达到预期的要求。通过设计结果表明,该系统设计可以准确地对足型进行判别,并且建模出较为准确的鞋垫模型,具有可视化、操作简单、适用性强等优点。
