光子增加双模压缩真空态在马赫-曾德尔干涉仪相位测量中的应用*
2020-07-04王帅眭永兴孟祥国
王帅 眭永兴 孟祥国
1) (江苏理工学院数理学院, 常州 213001)
2) (聊城大学物理科学与信息工程学院, 聊城 252059)
(2020 年2 月4日收到; 2020 年3 月8日收到修改稿)
量子度量学主要是利用量子效应来提高参数估计的精度, 以期突破标准量子极限, 甚至达到海森伯极限. 本文研究了一般光子增加双模压缩真空态作为马赫-曾德尔干涉仪的探测态时, 在何种情况下能够提高待测相位的测量精度. 根据量子Fisher信息理论, 尽管在探测态具有相同的平均光子数这一约束条件下, 对称的和非对称的光子增加操作并不能提高相位的测量精度. 但若是在给定初始压缩参数的情况下, 对称的和非对称的光子增加操作却能够增强相位的测量精度. 另外, 基于宇称测量的研究结果表明, 对于对称光子增加双模压缩真空态, 只有当待测相位趋于零时, 宇称测量才是最优测量. 而对于非对称光子增加双模压缩真空态, 宇称测量并不是最优测量方案.
1 引 言
相位测量是量子精密测量领域中的核心内容,其测量精度主要依赖于探测态、相位的积累方式以及测量方案, 其中探测态的选择决定了相位测量精度的最终极限. 早在20世纪80年代, Caves[1]就提出了利用压缩真空态作为马赫-曾德尔干涉仪(MZI)的探测态来提高相位的测量精度, 以期超越标准量子极限 (SNL), 即 Δφ=1/(是待测未知相位,是探测态的平均光子数). 随后, 诸如粒子数态[2-5], N00N态[6]以及纠缠相干态[7]等这些非高斯型的非经典量子态在量子度量学中也得到了广泛的研究. 这些非经典态作为MZI的探测态,测量精度不仅可以超越SNL极限, 甚至可以达到海森伯极限 (HL)[3,8].
近几十年来, 非高斯型量子态的制备及其非经典性质的研究一直是量子光学领域中的一个热点,并取得了极大进步[9-14]. 特别是非高斯型连续变量量子态可以弥补高斯型量子态和高斯局域操作在量子信息处理中的不足, 不仅成为改善量子隐形传态[15-18]、量子密钥分发[19,20]等量子信息技术的有效载体, 而且在相位的精密测量中也逐渐引起了人们的研究兴趣[21-27]. 譬如, Birrittella和Gerry[22]在2014年根据宇称测量方案[28]研究发现, 相干态和光子扣除压缩真空态的直积态作为MZI的探测态, 在给定相干态的振幅和压缩态的压缩参数的情况下, 光子扣除操作这一典型的非高斯操作可以进一步提高相位的测量精度. 类似地, 光子扣除和光子增加单模压缩真空态注入到非线性SU(1, 1)光学干涉仪的一端, 光子增加或扣除操作同样可以提高相位的测量精度[23,24]. 这些研究结果与Lang和Caves[29]的工作并不矛盾, 根据量子Fisher信息理论, 他们证明的是在探测态都具有相同的平均光子数这一约束条件下, 干涉仪的一端输入相干态, 另一端最优输入态是压缩真空态. 而在给定相干态的振幅和压缩态的压缩参数的情况下, 执行光子扣除或增加操作后量子态的平均光子数将会增加[30].因此, 干涉仪的探测态所含有的平均光子数也就增加了, 相应的相位测量精度也得到了提高. 基于此,考虑相干态和光子增加或扣除压缩真空态作为MZI的探测态时, 根据量子Fisher信息理论和宇称测量方案, Wang等[26]也详细地研究了光子增加和光子扣除这两种非高斯操作在量子相位精密测量中的性能表现. 结果表明, 即使在相同的平均光子数这一约束条件下, 光子扣除或增加操作在最佳相位测量值(0)时并不能提高待测相位的测量精度, 但是, 在待测相位适当偏离最佳测量值()时, 光子增加或扣除操作仍然可以提高相位的测量精度, 这是由于这两种非高斯操作使得测量精度随待测相位的变化更为稳定[26]. 最近,Zhong等[31]进一步指出, 基于宇称测量时, 光子扣除或增加在相位偏离最佳测量值时, 所带来的测量精度的提高是由宇称测量在此处并不是最优测量所引起的.
另一方面, Anisimov等[32]在2010年发现双模压缩真空态作为MZI的探测态时, 通过宇称测量方案[28], 相位测量精度可以达到HL极限. 然而,在实验上制备大光子数的双模压缩真空态是困难的. 譬如, 在实验上可稳定制备的双模压缩真空态所含有的平均光子数大约是4个[33], 相应的压缩参数为. Gerry和 Mimih[34]还发现, 当双模压缩真空态作为MZI的探测态时, 所得到的相位测量精度相对于待测相位本身的大小变化很不稳定. 而且, 当待测相位稍微偏离最佳测量值时,相位的测量精度会随光子数的增加而迅速变差, 甚至低于SNL极限. 为了克服这些问题, 2012年, 基于宇称测量方案, Carranza和Gerry[21]利用对称光子扣除双模压缩真空态(量子态的两个模扣除相同的光子数)来增强相位测量精度, 推广到非对称光子扣除双模压缩真空态的情况. 研究发现, 在给定初始压缩参数的情况下, 非对称光子扣除操作也能提高基于量子Fisher信息的量子Cramér-Rao界限(QCRB)[35]这一最终相位测量的精度极限.与对称的光子扣除操作相比, 在给定初始的压缩参数下, 基于量子Fisher信息和宇称测量的研究结果表明, 对称的光子增加操作可以更好地增强相位的测量精度[25]. 在实验上, 光子扣除操作可以由一块高透射率的分束器来实现[9]. 最近, 光子扣除单模、双模压缩真空态在实验上已经成功制备出来[12-14]. 光子增加操作在实验上实现要困难一些,它可以由非线性晶体中的非简并参量下转换过程来实现[10,11]. 目前, 利用该实验方案, 单光子增加相干态和热态也已经在实验上制备出来[10,11]. 近年来, 由于光子增加或扣除双模压缩真空态在量子信息处理中的潜在应用, 它们的一些非经典性质, 譬如纠缠特性、光子数的亚泊松分布、压缩性质等得到了详细的研究[15-18]. 随着量子态调控技术的进步, 光子增加双模压缩真空态也许在不久的将来也能在实验上予以实现. 因此, 从理论上研究光子增加操作在量子相位精密测量中的应用具有一定意义. 从实验制备的角度来看, 相对于对称的双模光子增加操作, 非对称的光子增加操作也许更容易一些, 且更具普遍意义. 因此, 本文将考虑一般的光子增加双模压缩真空态(包括对称的和非对称的光子增加情况)作为MZI的探测态, 研究在何种情况下, 一般的光子增加操作可以提高相位的测量精度.
本文首先简要介绍一般的光子增加双模压缩真空态, 随后基于量子Fisher信息理论, 讨论光子增加操作对待测相位QCRB的影响, 接着根据宇称测量方案讨论一般光子增加双模压缩真空态在量子相位测量中的性能表现, 以及分析宇称测量能否达到相应的QCRB, 它是否是最优测量方案.
2 一般的光子增加双模压缩真空态

式中k和l是光子增加的个数,为归一化常数

最近的研究表明, 除了Fock态以外的其他量子态增加n个光子后, 诱导产生的量子态所增加的平均光子数将大于n[30]. 这一看似矛盾的结果是由于光子增加是一种概率性的非高斯操作, 成功产生的光子增加量子态的光子数分布与原来的量子态已经不同[30]. 在量子光学中, 光子扣除是另外一种概率性的非高斯操作. 如果初态的光子数分布是超泊松分布, 光子扣除操作执行于该量子态后, 它的平均光子数同样可以明显增加. 在图1中, 当双模压缩真空态的两个模分别增加或扣除不同的光子数()时, 给出了相应的光子增加或扣除双模压缩真空态的平均光子数随压缩参数z的变化. 其中, 图 1(b)是文献 [35]的结果. 如图 1(a)所示, 与双模压缩真空态相比, 可以明显地看出光子增加双模压缩真空态增加的光子数大于的值. 对比图1(a)和图1(b)可以看出, 在给定相同的()取值和初始压缩参数z时, 对称的光子增加操作能更有效地提高量子态的平均光子数, 非对称的光子增加操作次之, 而对称的光子扣除操作在增加量子态的平均光子数方面的效果最差. 自然地, 在压缩参数为零()时, 光子增加双模压缩真空态就退化为双模Fock态, 即. 有趣的是, 对双模压缩真空态的单独一个模增加或扣除k个光子数, 结果态都具有相同的平均光子数. 这是因为对双模压缩真空态的一个模增加或扣除k个光子数后, 所得到的非高斯态是一样的, 都是双模压缩粒子数态[17,18]. 光场量子态所含有的光子数是量子精密测量中的一个重要参数, 下面将从理论上研究光子增加双模压缩真空态在量子精密测量中的性能表现.
3 MZI的量子Fisher信息
MZI是一个四端口的光学干涉仪. 一般情况下, 平衡MZI主要由两块50∶50的分束器、两块相移器和两块反射镜组成. 探测态先经过第一块50∶50的分束器(其变换由幺正算符来描述), 再经过相移器, 干涉仪的两条光路所产生的相位差由幺正算符 e xp[-iφJˆ3] 来描述, 然后再经过第二块50∶50的分束器(由幺正算符exp[iπJˆ1/2]来描述)后输出, 最后进行测量. 上面的三个演化可由一个幺正算符描述[37]



下面将扩展文献[25]的工作, 本文研究当一般的光子增加双模压缩真空态作为MZI的探测态时,相应的量子Fisher信息. 对于某一个探测态, 最终的测量极限由基于量子Fisher信息的QCRB所限定[38,39], 即




显然, 对于给定相同的压缩参数z, 单模光子增加操作也可以提高量子Fisher信息. 另外, (12)式与文献[35]中的(12)式是一样的. 这是因为对双模压缩真空态的一个模执行k个光子增加操作与对它的另一个模执行k个光子扣除操作效果是一样的, 结果态都是双模压缩粒子数态[17,18]. 另一方面,在限定总的平均光子数的情况下, 光子增加操作是否也能提高量子Fisher信息? 根据量子态的平均光子数, (12)式还可以表示成


此即文献[32]得到的结果.
图2和图3显示了光子增加双模压缩真空态和光子扣除双模压缩真空态分别作为MZI的探测态时, 相应QCRB在()取不同值时的变化情况. 为了便于比较光子增加或扣除操作在量子精密测量中的性能表现, 在图2(b)和图3(b)直接给出了文献[35]的结果. 对于一个给定的初始压缩参数z, 光子增加和光子扣除操作都能够提高QCRB,如图2所示. 但在给定的和与初始压缩参数z时, 对称的光子增加操作能更好地提高QCRB,其次是非对称的光子增加和扣除操作, 而对称的光子扣除操作所提供的QCRB最差, 这也许是因为对称的光子增加操作能够更好地提高量子态的平均光子数, 如图1所示. 另一方面, 若考虑探测态都具有相同的平均光子数, 光子增加或扣除都不能提高QCRB, 且随着光子增加或扣除数目的增加,相位的测量精度会变差, 如图3所示. 比较图3(a)和图3(b)还可以看出, 随着探测态的平均光子数变大, 光子增加双模压缩真空态与光子扣除双模压缩真空态所提供的QCRB几乎是一样的. 也就是说, 随着这两种非高斯态的平均光子数的增加, 二者在量子相位测量中的效果近似是等效的, 这一结果与文献[31]的结果相类似. 因此, 根据以上分析可见, 只有在给定初始压缩参数的情况下, 光子增加操作才能增强QCRB. 从图3可以看出, 对于一般情况, 单模光子增加操作确实会削弱量子Fisher信息.

图 2 相位测量精度的最终极限 随压缩参数z的变化曲线 (a)光子增加双模压缩真空态; (b)光子扣除双模压缩真空态; 不同颜色类型的曲线表示对双模压缩真空态执行不同光子数( )的增加或扣除操作Fig. 2. Ultimate limit of the phase sensitivity as a function of the squeezing parameter z : (a) The photon-added two-mode squeezed vacuum state; (b) the photon-subtracted two-mode squeezed vacuum state. Different color curves correspond to add to or subtract from a two-mode squeezed vacuum state with different photon numbers ( ).

图 3 相位测量精度的最终极限 随平均光子数的变化曲线 (a)光子增加双模压缩真空态; (b)光子扣除双模压缩真空态; 不同颜色类型的曲线表示对双模压缩真空态执行不同光子数( )的增加或扣除操作; 最上面的黑色虚线表示SNL极限, 而下面的黑色虚线则表示HL极限Fig. 3. Ultimate limit variation of the phase sensitivity with the mean photon number: (a) The photon-added two-mode squeezed vacuum state; (b) the photon-subtracted two-mode squeezed vacuum state. Different color curves correspond to add to or subtract from a two-mode squeezed vacuum state with different photon numbers ( ). The upper black dashed line denotes the SNL limit, while the below black dashed line represents the HL limit.
4 宇称测量和相位测量灵敏度
现在已经知道, 许多非经典态作为MZI或SU(1, 1)非线性干涉仪的探测态时, 宇称测量方案在待测相位取某些特殊值时可以达到量子精密测量的 QCRB[3,4,6,7,41-45]. 对于路径对称的量子态, Seshadreesan等[43]从理论上证明了在待测相位取某些特殊值时(这些取值称为相位最优测量值), 宇称测量方案能够达到QCRB. 本文就采用宇称测量方案来研究一般的光子增加双模压缩真空态作为MZI探测态时的相位测量精度, 并分析QCRB能否达到. 宇称测量方案对干涉仪内部的光子损失是敏感的. 简单起见, 这里仅考虑无光子损耗的宇称测量方案.
在文献[21, 25]的工作中, 对称光子扣除或光子增加双模压缩真空态均为双模孪数态(两个模的光子数相等)的叠加态. 因此, 他们可以直接借助双模孪数态作为MZI探测态时的宇称测量信号[3]来研究对称的光子扣除或光子增加操作对待测相位测量精度的影响. 现在考虑的是一般的光子增加双模压缩真空态, 它不再是双模孪数态的叠加态,而是一般双模数态的叠加态, 故不能直接利用文献[3]的结果. 本文将借助压缩态的相干态表象表示, 直接计算宇称测量的信号值(见附录A). 通过宇称测量来获得相位的信息, 实际上就是在干涉仪的一个输出端测量光子数的奇偶情况, 即计算宇称算符在输出量子态中的期望值. 譬如, 选择在MZI的a模输出端口进行光子数的宇称测量. 宇称算符在相干态表象下可表示为[46]


因此, 若已知干涉仪输出量子态的显式, 原则上就可以由 (16)式计算宇称算符的期望值了, 进而由误差传播理论给出相位测量的精度.
对于一般的光子增加双模压缩真空态作为MZI的探测态, 经过繁琐的计算后, 最终可以得到宇称算符在输出量子态下的期望值(见附录A)

由变量变换z2=/(+2) , 可直接得到文献[32]的结果. 为了便于分析, 与文献[32]类似, 在(17)式中也引入了一个额外相位. 根据(17)式, 在的情况下, 容易证明两个等式〈Πa(0)〉|k=l=1以及〈Πa(0)〉|k/=l=0 均成立. (17)式是本文的第2个重要结果, 根据该式可研究基于宇称测量的相位分辨率和测量精度. 特别地, 当, (17) 式还可以写成与勒让德多项式有关的简洁形式:

式中已利用勒让德多项式的产生函数[47]

根据(17)式, 图4反映了光子增加操作对宇称探测信号的影响. 正如文献[25]指出的一样, 对于对称光子增加双模压缩真空态,的峰值在处随着k和l的增加而变窄, 这表明在给定初始压缩参数的情况下, 对称的光子增加操作可以提高相位测量的分辨率. 但对于非对称的光子增加操作, 在处, 有. 此外, 由图 4还可以看出,的峰值对应的待测相位还与光子增加操作数k和l有关.

图 4 对于给定 和一些不同的( )值, 宇称测量的信号值随待测相位的变化曲线Fig. 4. Plot of the signal values of the parity detection against the phase shift for and some values of ( ).
接下来研究宇称测量方案的相位测量精度. 由误差传播理论, 相位测量精度由下式确定:

特别地, 当k=l=0 时, 容易得到双模压缩真空态作为MZI的探测态时, 基于宇称测量方案的相位测量精度为[32]

式中压缩(参数与)量子态的平均光子数的关系为z2=/+2.
下面考虑宇称测量方案给出的相位测量精度随探测态的平均光子数的变化情况. 在时, 图6给出了当光子增加双模压缩真空态的k和l取不同值时, 基于宇称测量的相位测量精度随平均光子数的变化曲线. 图6(a)表明, 随着取值的增加, 对称光子增加双模压缩真空态所提供的相位测量精度会越来越差. 图6(b)还表明,非对称光子增加双模压缩真空态提供的相位测量精度几乎完全一样. 由此可见, 一方面图6表明, 在相同平均光子数这一约束条件下, 与双模压缩真空态相比可以看出, 对称和非对称光子增加双模压缩真空态并不能提高相位的测量精度; 另一方面, 数值证明对称光子增加双模压缩真空态作为MZI的探测态时, 宇称测量在待测相位φ→0 时, 能够达到 QCRB, 是最优测量, 如图 3 和图 6(a)中l=1,2时的曲线所示. 但是, 对于非对称光子增加双模压缩真空态, 数值上可以证明即使在相位的最优测量点, 宇称测量也不是最优测量, 如图3和图6(b)中时的曲线所示.

图 5 对于光子增加双模压缩真空态作为干涉仪的探测态, 当 ( )取不同值时, 随待测相位 的变化 (a)给定初始压缩参数 ; (b)给定相同的平均光子数Fig. 5. Phase sensitivity as a function of the phase shift for some values of ( ) when the photon-added two-mode squeezed vacuum state is considered as interferometer states: (a) For a given initial squeezing parameter; (b) for a given mean photon number .
最后, 为了说明对于非对称光子增加双模压缩真空态, 宇称测量即使在相位最优测量值也不是最优测量, 在图7中分别画出了基于宇称测量和量子Fisher信息得到的相位测量精度随压缩参数的变化曲线. 由图7可以看出, 在给定初始压缩参数z时, 虽然随着非对称的光子增加操作(k,l)取值增加, 可以提高相位的测量精度, 但宇称测量在待测相位φ→0 处给出的相位测量精度并不能到达QCRB. 那么, 其他的一些常用的相位测量方法,例如强度测量或平衡零拍测量[28], 是否可以达到基于量子Fisher信息的, 与文献[35]类似,可以证明当一般的光子增加双模压缩真空态作为MZI的探测态时, 采用光强测量和平衡零拍测量更不合适. 比如, 依据正交分量测量的平衡零拍测量, 正交分量(如坐标算符)在输出态下的信号值为零, 根本没有相位的任何信号[48], 而由观测量()提供的相位测量精度在处是发散的, 这与文献[49]的工作类似.
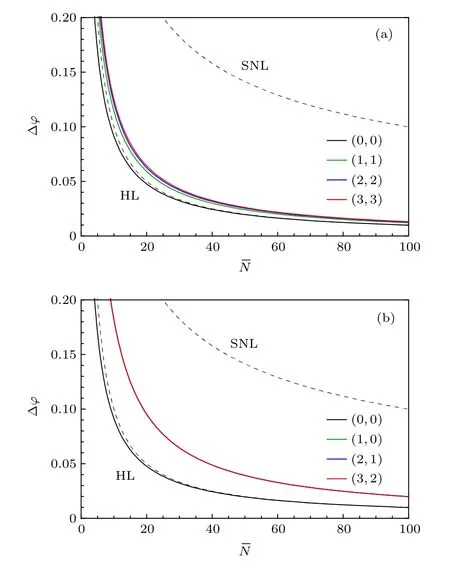
图 6 在 时, 对于光子增加双模压缩真空态的( )不同取值, 相位测量精度 随平均光子数的变化曲线 (a)对称光子增加的情况( ); (b)非对称光子增加的情况( ); 最上面的黑色虚线表示SNL极限,下面的黑色虚线则表示HL极限Fig. 6. Plots of the phase sensitivity as a function of the mean photon number of the photon-added two-mode squeezed vacuum state for some different values of ( ) at: (a) Symmetric photon-added two-mode squeezed vacuum state ( ); (b) asymmetric photon-added twomode squeezed vacuum state ( ). The upper black dashed line denotes the SNL limit, while the below black dashed line represents the HL limit.

图 7 和给定不同( )取值时, 相位测量精度随初始压缩参数z的变化 (a)基于宇称测量得到的相位测量精度; (b)基于量子Fisher信息得到的最终测量界限Fig. 7. Phase sensitivity as a function of the initial squeezing parameter z for different values of ( ) at :(a) The phase sensitivity obtained by the parity detection;(b) the ultimate limit of phase sensitivity obtained by the quantum Fisher information.
因此, 以上量子Fisher信息理论的结果表明,只有在给定初始压缩参数z的情况下, 光子增加操作才可以增强相位的测量精度. 而在给定相同平均光子数这一约束条件时, 光子增加操作则不能提高相位的测量精度. 当采用宇称测量这一具体的相位测量方案时, 研究结果表明, 对称光子增加双模压缩真空态作为MZI的探测态时, 宇称测量在时是一种最优测量. 但对于非对称光子增加双模压缩真空态, 宇称测量即使在相位最优测量值处也不最优测量.
5 结 论
本文研究了一般的光子增加双模压缩真空态作为MZI的探测态, 以及它在相位测量精度中的性能表现. 一方面根据量子Fisher信息理论, 研究结果表明: 在给定探测态具有相同的平均光子数这一约束条件下, 与双模压缩真空态相比, 光子增加双模压缩真空态并不能提高相位的测量精度. 但若是给定初始压缩参数z, 与双模压缩真空态相比,对称和非对称光子增加操作都能增强QCRB, 只是对称的光子增加操作效果更好一些. 这也许是由于对称的光子增加操作可以更好地提高双模压缩真空态的平均光子数的缘故. 因此, 一般的光子增加双模压缩真空态在量子度量学中具有一定的应用价值. 另一方面, 根据宇称测量这一具体的测量方案, 理论结果表明: 对于给定初始的压缩参数,对称的光子增加操作在相位最优测量值附近时能够提高相位的测量精度, 并且能够达到QCRB. 但对于非对称光子增加双模压缩真空态, 宇称测量却不能达到QCRB. 因此, 对于一些非经典态作为MZI的探测态, 宇称测量并不总是一种最优测量.
附录A 宇称算符在MZI输出态下的期望值
为了计算的方便, 本文利用双模压缩真空态在相干态表象下的展开式, 即

那么, 一般的光子增加双模压缩真空态可以表示成

当光子增加双模压缩真空态输入到MZI进行传播时, 根据(6)式和(7)式, 输出量子态可以写成

相应地, 输出态的左矢为

把(A3)式和(A4)式代入到(16)式, 并利用数学积分公式(Puri R R 2001Mathematical Methods of Quantum Optics(Berlin: Springer-Verlag) pp267—270)

