基于STM32的自动泊车系统设计
2020-07-02程鹏飞
吴 俊 程鹏飞
(安徽理工大学 安徽 淮南 232001)
引言
近年来,随着汽车工业的迅猛发展,全球汽车保有量逐年增加,不仅出现大量的“堵车”现象,而且造成汽车行驶的道路空间越来越紧张,车辆碰撞事故时常发生。在这种大背景下,智能交通系统ITS(Intelligent Transportation System)应允而生,俨然已经成为世界交通运输科学的前沿技术。
自动泊车系统作为ITS的一部分越来越受到人们的重视和欢迎,越来越多的汽车制造商和研究机构投入人力物力进行自动泊车系统的研究与开发。国人自主研发国产的自动泊车系统,与我国自主汽车研发的趋势相符合。[1]
一、自动泊车系统的系统构架
目前汽车配备的自动泊车系统的基本系统结构如图1所示,自动泊车系统基本包含环境数据采集系统、中央处理器和车辆执行系统三个部分。[2]
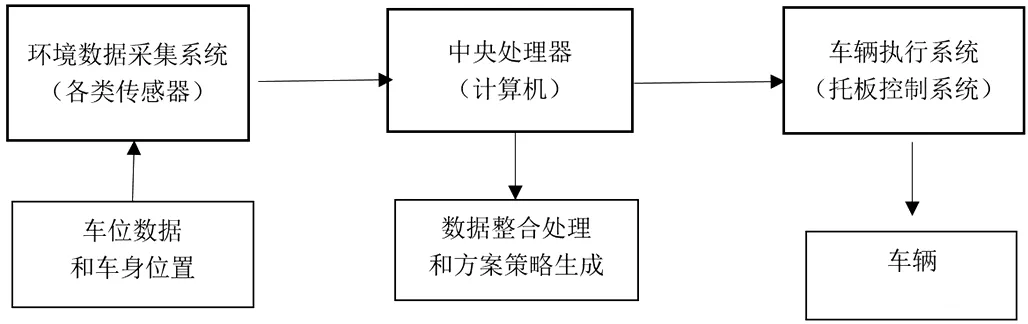
图1 自动泊车系统构架图
二、自动泊车系统的硬件设计及原理分析
在车库中,放置一条直的机械轨道,在轨道上放上一个可以360度旋转的隔板,以拖动车辆移动、旋转。车辆行驶到车库门口时,可用手机app连接无线通信模块控制CPU,或下车利用车库的控制按键控制CPU,使车库中的移动隔板在CPU的控制下顺着轨道移动出库,并在出库后,用按键控制其旋转到适当的位置,车辆能够直线行驶到隔板上。行驶到隔板上之后,隔板抬升,使车辆离地,旋转到刚出库时的位置,再顺着轨道倒退回车库,这样,便实现了自动倒车入库,简图如下。在运动过程中,图像传感器始终获取装置的位置信息并向CPU反馈,在位置发生错误时,液晶显示屏会显示警报信息。
在街道上或住宅小区的路旁,需要侧方位停车的车位,也可以安装该装置,当班可以直接移动到车位外,车辆径直开到隔板上即可,随后当班拖动车辆移动到初始位置,便实现了自动侧方位停车。
基于STM32自动泊车系统控制及执行模块硬件结构图如图2所示。
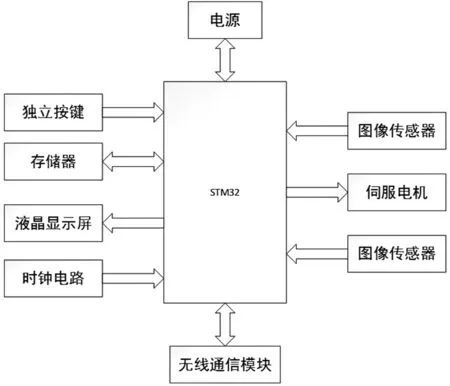
图2 系统硬件结构图
三、手机客户端及WIFI模块与单片机的连接
本系统所采用的手机客户端是利用Java和swift语言分别在安卓系统和IOS系统下编写,由于是直接基于系统编写,可直接与服务器和单片机进行连接测试。本客户端的主要功能是将用户所发出的指令通过服务器,WIFI模块传送至STM32芯片进行控制。客户端与服务器之间利用TCP/IP协议进行数据传输,WIFI模块通过路由器连接至互联网后同样利用TCP/IP协议进行数据传输,手机客户端负责连接服务器并发出指令。[3][4]
四、移动端向车APP介绍
该向车APP主要分成两个部分,初始化程序和控制程序。
初始化程序包括两步:首先输入车主的车牌号码与手机配对。然后上传车身照片一张与手机绑定以防出错。
控制程序也包括两步:完成初始化程序后将会出现控制界面,用户按照提示进行操作。先选择托盘模式上升还是下降,意味着取车还是停车,当车子在托盘上后通过按键来控制托盘的方向。车子成功停好后将自动播报车子已停好,接着在APP界面出现一些选项,通过点击这些按键将自动检测车况,检查车子是否熄火,手刹是否拉好,车子的门窗是否关好以及车中是否还有人员在内防止被困。点击后若是红色则说明有该问题,车主需要过去查看,若为绿色则表示没问题车主可直接离开。如图3所示。
五、结束语
自动泊车系统使停车操作过程更加简单迅速,解决了停车难问题,为人们带来极大的便利,该项技术的发展和应用具有重要意义。

图3 控制程序
