基于动边界微积分关系再论任意运动控制体的雷诺输运方程推导
2020-07-02刘沛清
刘沛清
(北京航空航天大学陆士嘉实验室,北京100191)
1 动边界微积分关系
对于一维函数f(x,t),在动边界下的微积分关系为

式(1)称为莱布尼茨公式。其中,a(t)和b(t)分别为边界值,是时间的函数。式(1)等号左边表示积分函数对时间的导数;右边第一项积分为被积函数对时间偏导数的积分;第二项为上游边界运动引起的,其中db(t)/dt=Vu相当于上游边界速度;第三项为下游边界运动引起的,其中da(t)/dt=Vd相当于下游边界速度;这第二项和第三项之和为动边界效应。则式(1)也可以写为
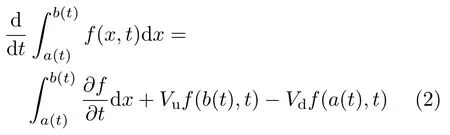
如果a(t)=a,b(t)=b,边界固定不动,则式(1)变为固定边界积分与微分关系,即

根据式(1)可以推广到三维情况。假设相对于坐标系静止不动的控制体体积为τC,控制体的边界面为SC,在控制体内被积函数为f(x,y,z,t)。则由式(3)得到在固定边界面的静止控制体内被积函数微积分关系为

式中δτ为体积微元。设对相对于坐标系任意运动的控制体体积为τV,其运动边界面SV上的速度为Vb。如果在t时刻体积τV=τC,边界面SV=SC,控制体边界面上的运动速度为Vb,如图1 所示。则由式(2)推广到三维情况,此时可获得具有运动边界面的被积函数微积分关系为
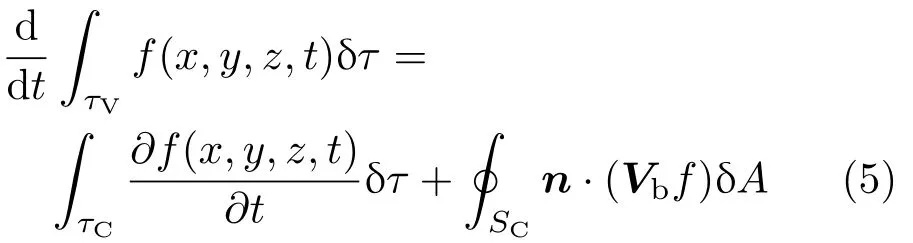
式中δA为边界面积微元,Vb为边界面的移动速度矢量。式(5)等号左边表示积分函数对时间的全导数;右边第一项为被积函数在静止控制体内对时间的偏导数积分(静边界积分);第二项为控制体边界面运动引起的净增量(动边界效应)。
如果Vb= 0 (边界面固定不动),则式(5)的动边界微积分变为静边界微积分式(4)。
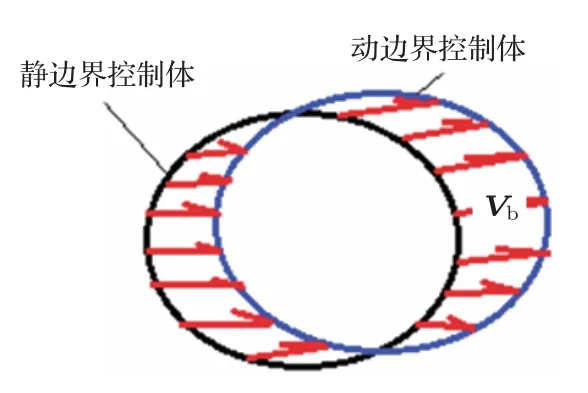
图1 动静边界控制体
2 流体系统通过静止控制体积分的随体导数转换关系
流体系统由流体质点系统组成,系统的边界随流体运动,流体系统与系统外界没有质量交换,但可有动量和能量的交换。控制体相对于坐标系不变的为静止控制体,相对于坐标系运动的为运动控制体。流体系统与控制体的关系是:流体系统可以通过控制面流进和流出控制体而发生质量、动量和能量交换。设在t时刻取与静止控制体重合的流体系统体积为τf,流体系统的边界面为Sf,则τf=τC,Sf=SC,通过静止控制体边界面SC上的流体质点运动速度为ub。在t+∆t时刻,该流体系统运动到新的位置,如图2 所示。则流体系统的微积分关系(相当于流体系统通过静止控制的微积分关系)为
式中,左边的微分是流体系统积分的随体导数(跟随流体运动的系统积分导数),右边第一项为被积函数在静止控制体内对时间的偏导数积分,第二项为流体系统通过静止控制体边界面引起的动边界效应。式(6)就是常用的流体系统通过静止控制体的雷诺输运方程,常见于流体力学教科书中[1-3]。根据高斯积分有
由式(6)得到
对于不可压缩流体系统,因为∇·u=0,则式(7)变为

式(8)表示,对于不可压缩流体系统,对流体系统积分的随体导数等于静止控制体内对被积函数的随体导数积分。
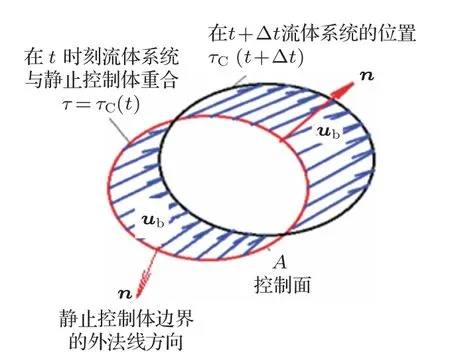
图2 流体系统通过静止控制体
3 流体系统通过运动控制体积分的随体导数转换关系
假设控制体相对于坐标系是移动的,控制体的边界面相对于坐标系的移动速度为Vb,为了区别于静止控制体体积τC,设运动控制体的体积为τV,运动控制体的边界面为SV。在t时刻,取流体系统体积与运动控制体与静止控制体重合,即τf=τV=τC,Sf=SV=SC,在Sf上的速度为ub,在SV上的速度为Vb。在t+∆t时刻,所取的流体系统、运动控制体和静止控制体的相对位置,如图3 所示。则由式(5) 得到,对于运动控制体的微积分关系为

由式(6)得到,对于流体系统的微积分关系为
如果利用式(10)取代式(9)右边第一项,则式(9)变为

整理后,得到
由式(11)表明:运动控制体积分的随体导数等于流体系统的随体导数减去净流出运动控制体的增量。
如果将式(7)代入式(11),得到
式(12)表明,运动控制体积分的随体导数等于静止控制体内被积函数的随体导数与被积函数和速度场散度积之和的积分减去净流出运动控制体的增量。利用式(11),也可以写为
式(13)表明,流体系统积分的随体导数等于运动控制体积分的随体导数加上静流出运动控制体的增量。
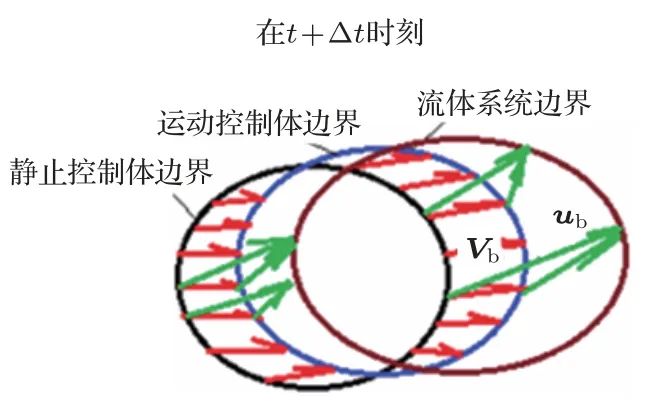
图3 在t+∆t 时刻的流体系统、运动控制体、静止控制体相对位置
4 讨论
(1)如果Vb=0,则运动控制体积分变为静止控制体积分(τV=τC),则由式(12)简化为
利用高斯积分,有

代入式(14),得到

(2)如果Vb=ub(τV=τf),表明运动控制体随流体系统运动,与流体系统无相对运动,则由式(11)简化为流体系统通过静止控制体积分的随体导数转换关系,为

利用式(7),得到
利用高斯积分,有
式(17)即为流体系统通过静止控制体积分的随体导数表达式,即雷诺输运方程(6)。
5 关于动量输运方程的基本形式
5.1 流体系统通过静止控制体的动量积分方程
现考虑一个流体系统,设在t时刻流体系统的体积为τf,其与静止控制体τC重合,在t+∆t时刻该系统运动到新的位置。该流体系统在t的动量为
其中,ρ为流体的密度。根据动量定理,流体系统动量的随体导数等于作用在该系统上所有的外力矢量和[4-7]。即

如果对微元流体团运动微分方程积分,还可以得到下列的表达式。由流体微元(物质系统)的运动微分方程
在任意流体系统(物质系统)上积分,得到
由此可见,式(18)与式(19)是等价的。事实上,利用连续方程不难证明。利用质量守恒定理,有
得到

由此说明,式(18)和式(19)是等价的。
同样,利用式(6),式(18)可以写为

利用连续方程
利用式(6),流体系统通过静止控制体动量积分的随体导数转换关系为
利用高斯积分,得到
代入式(22)得到
利用连续方程,得到

5.2 流体系统通过运动控制体的动量积分方程
利用式(12),式(18)可写为
式(23)表明:流体系统通过运动控制体的动量积分随体导数等于流体系统的动量积分随体导数减去净流出运动控制体的动量增量。
利用式(12),式(23)可写为
式(23)也可写为
式(25)表明:流体系统动量积分的随体导数等于流体系统通过运动控制体动量积分的随体导数加上净流出运动控制体的动量增量。
6 结束语
从运动边界的体积分导数关系看,流体系统积分值的随体导数,相当于一个边界以流体速度运动的体积积分导数。如果取控制体相对于坐标系是固定不变的积分体积,则称为静止控制体,所建立的流体系统通过该静止控制体的随体导数转换关系称为雷诺输运方程。如果取控制体相对于坐标系是以一定速度运动的积分体积,则称为运动控制体,所建立的流体系统的积分随体导数可转化为流体系统通过运动控制体的雷诺输运方程。本文统一按照动边界积分导数关系建立了雷诺输运方程,推导过程严谨、简洁,物理意义明确,便于更好地理解雷诺输运方程的物理意义。