四足机器人现状研究
2020-06-23王睿
王睿
摘 要:四足机器人在航空航天、预警侦察、补给运输等领域具有广泛的应用前景。本文分析了国外和国内四足机器人的发展现状,然后对国内外四足机器人在技术方面的差距进行了分析,最后对四足机器人的发展前景进行展望。
关键词:四足机器人;现状;应用前景
四足机器人相较于轮式、蠕动式等机器人具有机体结构稳定、运动灵活、受地形限制少等优势,在航空航天、预警侦察,补给运输等领域具有广泛的应用前景[1]。随着时代的发展以及科学技术的进步,四足机器人的实用价值逐渐凸显。同时,计算科学、新材料等科学技术的迅速发展使得四足机器人的性能有了极大的提高。
1 国外发展现状
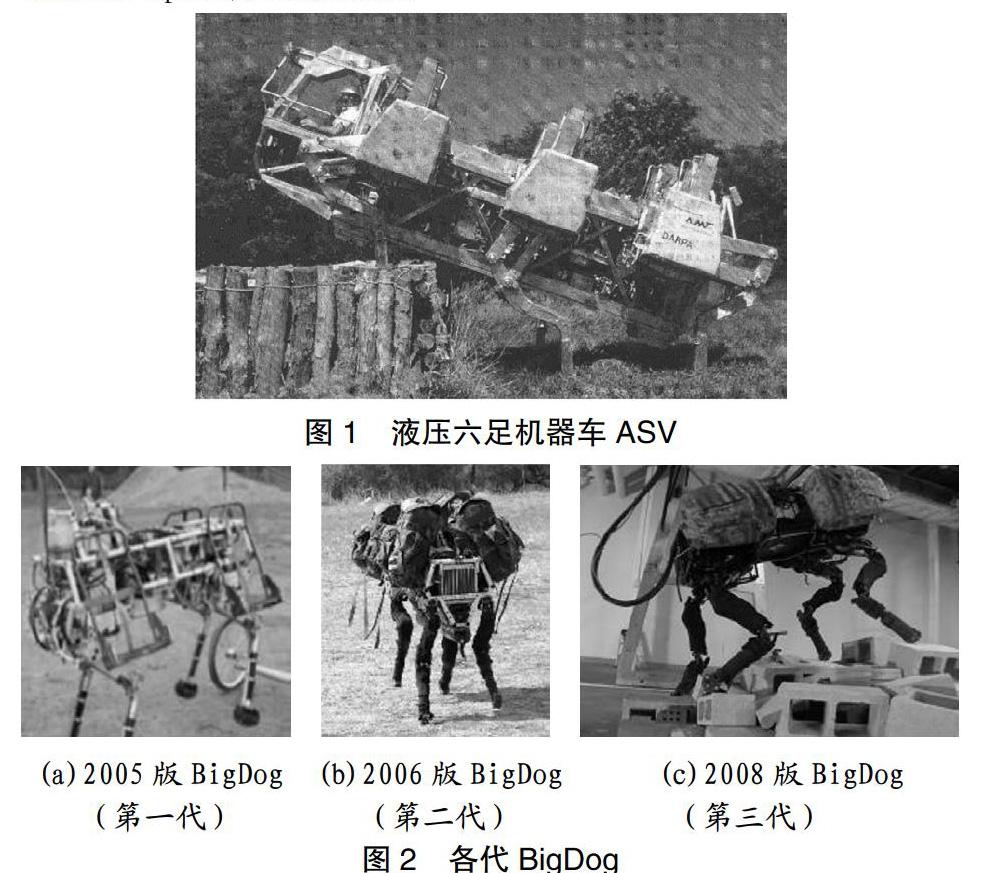
20世纪中叶,国外就已经出现针对液压驱动足式机器人的研究。其中,美国是最早进行该项研究的国家之一[2]。1968年美国通用电气公司将一辆汽车的车轮更换为液压腿足,成功改造出一款四足机器车——Walking Truck[3]。1985年美国俄亥俄州立大学在国防高级计划研究局的资助下开发了一款液压六足机器车(Adaptive Suspension Vehicle,ASV),如图1所示。ASV可以看作是第一款实际意义上的液压足式机器人。ASV整车质量约2.7吨,长约5.6m,拥有多种控制模式,可以在复杂地形环境中行走[4]。但是其运动需要人工控制且体积重量巨大,没有实用价值。2005年美国波士顿动力公司(Boston Dynamic)在国防高级研究计划局资助下开发出第一代BigDog,并在随后的几年里对其进行研究和完善,先后开发出第二、三代BigDog,各代BigDog如图2所示。通过图2可以看出,通过不断的升级,BigDog的实用性越来越强。对比第一代BigDog,第二代BigDog主要對腿部膝关节结构进行了改进,使得BigDog稳定性得到了极大的提高;第三代BigDog在髋关节位置增添了一个新的自由度,该自由度的添加使得BigDog腿部着地时小腿与地面的夹角始终处于一定范围内,提高了BigDog在复杂地形下的通过能力[5]。在波士顿动力发布的视频中,BigDog能够在沙滩、雪地甚至泥泞地面等复杂地形下平稳行走,受到突然性侧向冲击时能够快速自主调节身体状态以保持平衡。在此基础上,波士顿动力公司针对不同用途先后研发出LS3、Cheetah、WildCat、Spot等四足机器人。
美国BigDog的成功研制极大的加快了四足机器人的发展进程。2011年,意大利理工大学开发了HyQ电液混合驱动四足机器人[6]。该机器人充分结合了液压驱动和电驱动的优点,腿部髋侧摆关节采用电驱动,而髋纵摆关节和膝关节均采用液压驱动,在HyQ机器人基础上开发的miniHyQ是迄今为止最轻、最小的四足机器人。2005年日本千叶大学研制的TITAN XI以及2014年日本中京大学研制的液压多足仿生机器人已经实现了在20°斜坡上的稳定行走。韩国工业技术研究院于2010年和2014年分别研制出KITECH p-2和Jin Poong,该两种四足机器人能够完成前进、倒退以及卧倒等动作[7]。
2 国内发展现状
BigDog等四足机器人的成功在国际社会上掀起了对四足机器人的研究热潮,各个国家的研究机构设计出各有特点的四足机器人。相比之下,中国对于四足机器人的研究比较落后,最初集中在电动四足机器人的研究上。直到国家“863计划”立项,国内研究机构才开始研究液压四足机器人。
目前,国内针对高速度、高负重以及高环境适应性四足机器人的研究主要集中于高等院校,山东大学的SCalf、上海交通大学JTUWM-Ⅲ、哈尔滨工业大学HITAN以及北京理工大学、国防科技大学等研制的四足机器人都是一些具有代表性的作品。
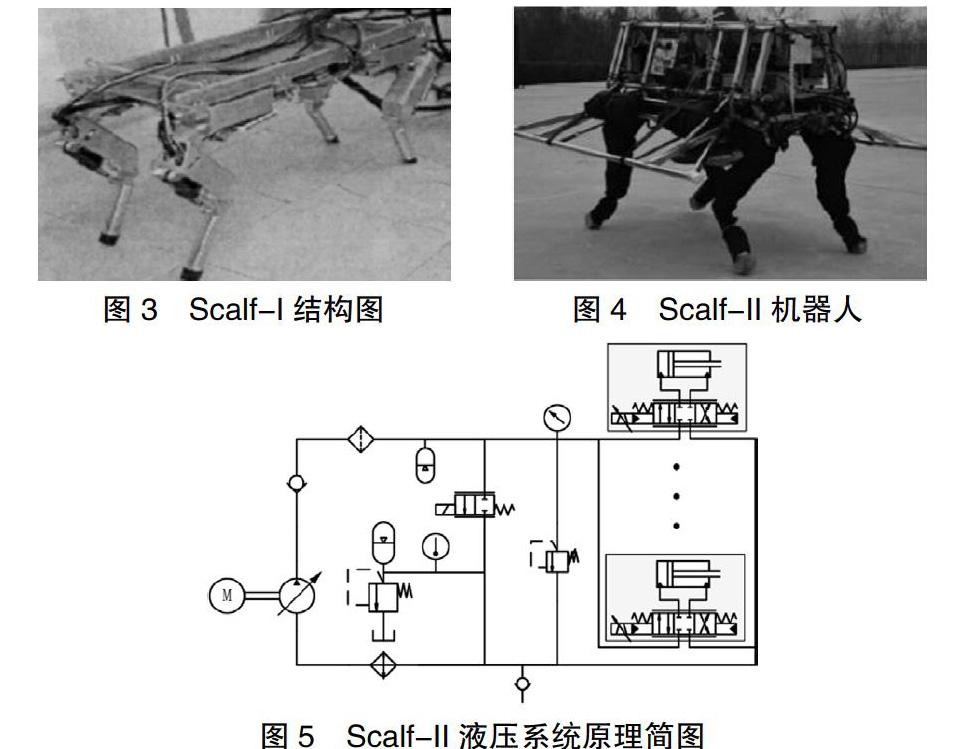
山东大学是最早进行四足机器人研究的机构之一。2010年,山东大学开发的四足机器人Scalf-I,如图3所示。该机器人机体上未集成液压油源,采用室内固定液压泵站供能。在实验室条件下,Scalf-I在负重80kg时能够以1.2m/s的速度行走。同时,Scalf-I对不平坦路面也有一定的通过能力[7]。
2012年,山东大学在Scalf-I的基础上研制出Scalf-II,如图4所示。Scalf-II在Scalf-I的基础上集成了液压动力系统,实现了动力自给;优化了腿部结构,提高了机器人的运动学和动力学性能;集成了大量的传感器及惯性测量元件,使机器人具有自主恢复、保持平衡的能力[7]。Scalf-II所采用的液压系统与Scalf-I基本类似,如图5所示,该液压系统是典型的单泵多执行器液压系统。该系统设定压力为20MPa,主要通过调节发动机转速以及变量泵排量调节系统流量。在工作过程中,该液压系统主要通过伺服阀的节流效应协调系统压力供应和执行器需求之间的矛盾。但是伺服阀在工作过程中存在大量的节流损失以及泄漏,使得系统能耗较高,能量利用率较低,极大的影响了四足机器人的续航能力。
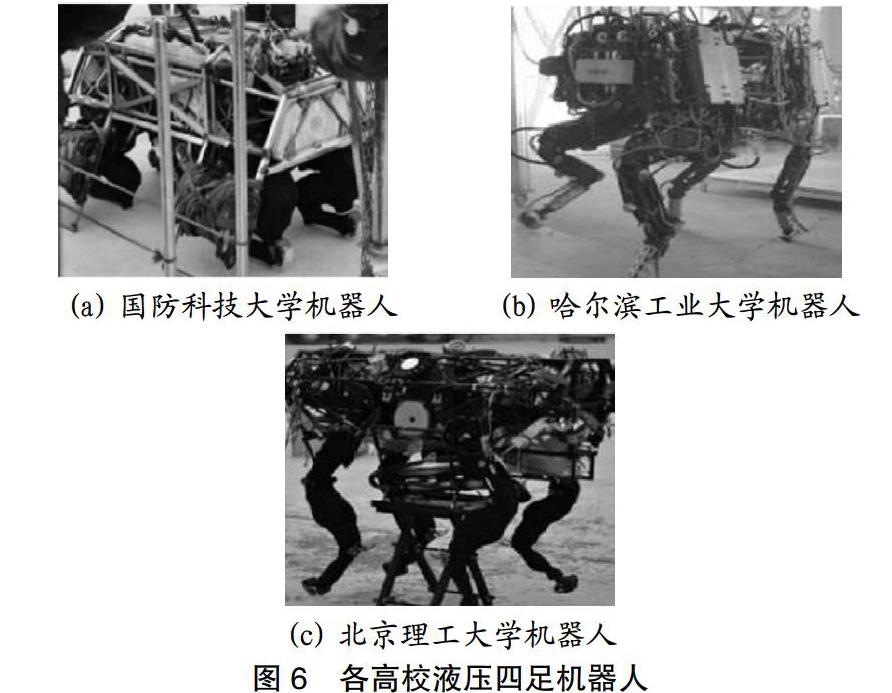
除山东大学以外,国防科技大学、上海交通大学、哈尔滨工业大学、北京理工大学等都各自研制了四足机器人,如图6所示。它们所采用的液压系统与Scalf非常类似,因此不再详细描述。
综合各项指标而言,由于我国对四足机器人的研究开始较晚,关键元器件制造与国外相比存在差距等原因,现开发的四足机器人在负重能力、运动速度、运动平稳性和环境适应性等方面与国外四足机器人相比存在较大的差距。从技术层面分析,两者之间的差距主要存在于[8]:
(1)液压系统硬件加工制造技术差距。主要原因是小型液压执行器设计制造技术(包括相应材料加工技术)、高频伺服阀设计制造技术、伺服控制技术及液压回路信号检测技术等较为落后。
(2)液压系统元器件匹配问题。在四足机器人液压系统中,每个元件都发挥着不可替代的作用。某些元器件参数与液压系统指标不匹配将无法发挥系统最大效能,这将直接影响到整个机器人的运动品质。
(3)液压理论研究进步缓慢。该问题的主要原因是没有针对四足机器人的运动特点对液压系统进行重新设计或采取其他有效措施,导致液压系统流量、压力供应与执行机构需求极度不匹配。
3 结语
国内研究相对较晚,与国外研究水平相比有一定差距,但经过科研人员前期的努力,针对四足机器人的研究已经取得一定成果。随着控制理论、人工智能、加工工艺等技术的不断发展使得四足机器人的性能有了很大提升,且其在军事、航天等领域研究范围的不断扩大,实验样机的不断成熟,实地实验的不断开展,四足机器人的巨大应用价值也将愈发明显。
参考文献:
[1]Mohsen Azimi,M.R.Hairi Yazdi.Energy dissipation rate control and parallel equations solving method for planar spined quadruped bouncing robot[J].Journal of Mechanical Science and Technology,2017,31(02):875-884.
[2]Guardabrazo T A,Gonzalez d S P.Building an energetic model to evaluate and optimize power consumption in walking robots[J].Industrial Robot: An International Journal,2004,31(02):201-208.
[3]雷静桃,王峰,俞煌颖.四足机器人轨迹规划及移动能耗分析[J].机械设计与研究,2014,30(01):29-34.
[4]Kar D C,Kurien Issac K,Jayarajan K.Minimum energy force distribution for a walking robot[J].Journal of Field Robotics,2001,18(02):47-54.
[5]朱雅光.基于阻抗控制的多足步行機器人腿部柔顺控制研究[D].杭州:浙江大学,2014:35.
[6]Garcia E,Galvez J A,Santos P G D.On Finding the Relevant Dynamics for Model-Based Controlling Walking Robots[J].Journal of Intelligent and Robotic Systems: Theory and Applications,2003,37(04):375-398.
[7]刘成菊,林立民,陈启军.基于Rulkov神经元模型的四足机器人适应性行走控制[J].同济大学学报(自然科学版),2019,47(08):1207-1215.
[8]雷豹.具有柔性回转关节的单腿机器人跳跃运动动态特性研究[D].哈尔滨:哈尔滨工业大学,2014:56
