一种用于山顶雷达的斜向运输装置结构设计及轨迹规划
2020-06-23韦磊
韦 磊
(中国船舶重工集团公司第七二三研究所,江苏 扬州225101)
0 引 言
山顶雷达由于装备位置的特殊性,不仅给安装带来了挑战,而且给日常的调试、维护、检修等带来极大的不便。本文充分考虑地形因素,设计出一种用于山顶雷达的斜向运输装置,方便人员携带设备到达指定位置完成作业[1]。该斜向运输装置采用钢丝绳曳引提升实现人员和设备的运输,提升钢丝绳及限速绳在布置的过程中需要与山坡、导向系统的轨迹保持一致,具体可以通过曳引绳调节装置[2]和限速绳导向装置[3]进行调节。轿厢运行过程中的倾角会随着坡度而变化,因此需要通过厢体调节机构对轿厢倾角进行调节,抵消水平加速度的影响,满足人员和设备在运输过程中的安全性和舒适性[45]。本文设计的用于山顶雷达的曳引斜向运输装置相比垂直运输的曳引提升要更省力,更省能量,而且结构紧凑、便于布置,满足了该特殊应用环境下运行的需求。
1 斜向运输装置机械结构
山顶雷达斜向运输装置的布置图如图1所示,主要包括轿厢系统、导向系统、对重系统、曳引装置和层门。其中导向系统布设在山坡上,曳引装置布设在山坡顶端,轿厢系统和对重系统通过曳引装置驱动、曳引钢丝绳牵引分别沿着导向系统的上层、下层导轨移动。导向系统包含导轨架、轿厢导轨、对重导轨、曳引绳调节装置和限速绳导向装置,导向系统示意图如图2所示,轿厢导轨、对重导轨和曳引绳调节装置均固定在导轨架上,限速绳导向装置单独布置在导轨架一侧,且与导轨架平行布置。

图1 斜向运输装置布置图

图2 导向系统示意图
曳引绳调节装置控制曳引钢丝绳的轨迹与导轨轨迹一致,防止曳引钢丝绳干涉导轨架或者飘悬于空中,保证轿厢和对重的平稳运行。曳引绳调节装置结构示意图如图3 所示,曳引绳被限制在2个旋转轮内。限速绳导向装置控制限速绳的轨迹与导轨轨迹一致,防止限速绳干涉地面或者飘悬于空中,保证限速绳能够在轿厢发生断绳等超速事故时进行紧急制动,限速绳导向装置结构示意图如图4所示,通过滑轮对限速绳实现导向,根据坡度的变化分别布置限速绳托绳装置和限速绳压绳装置。

图3 曳引绳调节装置
为了在轿厢运行过程中实时调节厢体倾角,在厢体和底部滑车之间一侧铰接,另一侧连接有厢体调节机构,厢体调节过程示意图如图5所示。通过厢体调节机构调节厢体与底部滑车之间的夹角,从而使厢体适应坡度的变化。

图5 厢体调节过程
厢体调节机构采用卧式螺旋千斤顶的原理实现厢体的调节,厢体调节机构的具体结构如图6所示,包括主动千斤顶、主动千斤顶螺杆、伺服电机、联轴器、从动千斤顶螺杆、从动千斤顶、主动齿轮、从动齿轮和同步齿轮。通过伺服电机驱动、齿轮传动和螺杆传动实现厢体调节机构的升降,通过联轴器连接主动千斤顶螺杆和从动千斤顶螺杆保证了主动千斤顶和从动千斤顶调节的同步性。
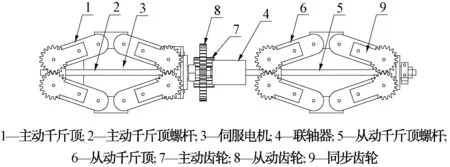
图6 厢体调节机构
2 斜向运输装置运动特性研究
2.1 斜向运输装置物理模型
设斜向运输装置运行路径为y=f(x),假设为光滑曲线,曳引机驱动速度为v。
轿厢从底层开始匀速向上运行时间为t,走过的导轨曲线弧长为:

轿厢走过的水平距离x随时间t的变化为:

轿厢底部滑车倾角φ随时间t的变化为:

为进一步得出电机转速n与厢体水平期望倾角γ、底部滑车倾角φ的关系,建立如图7所示的调节机构参数化模型,根据几何关系可得:
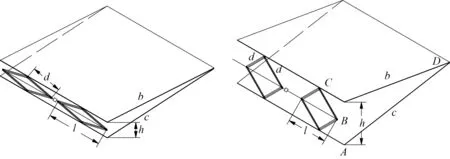
图7 调节机构参数化模型

式中:θ为电机转角;s为螺杆螺距;L为螺杆初始水平跨度;i为减速比;l为螺杆水平跨度;d为调平机构支撑臂臂长;b为轿厢厢体长度;c为底部滑车长度;h为厢体调平机构支撑高度。
可得电机转速n与厢体水平期望倾角γ、底部滑车倾角φ的关系:

2.2 无摩擦力时的力学模型
轿厢运行过程中,为了保证乘客的舒适性和安全性,需对厢体倾角实时调节,使乘客与厢体之间的摩擦力为0。图8为乘客受力分析图,通过牛顿第二定律,可得:
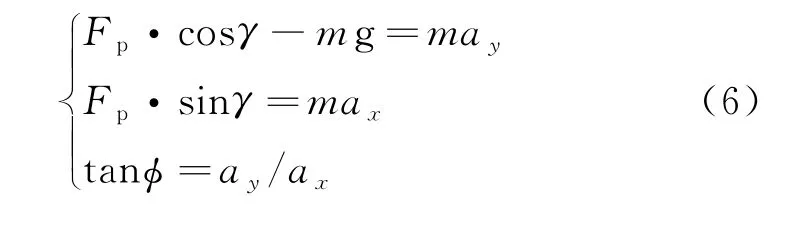

图8 乘客受力分析图
式中:Fp为厢体底板对乘客的支撑力;m为乘客质量;a x为轿厢水平加速度;a y为轿厢竖直加速度。
得出厢体水平期望倾角γ与轿厢水平加速度a x、底部滑车倾角φ的关系:

综上,将式(3)和式(7)代入式(5),得到电机转速n与时间t的关系函数:

其中:


2.3 轨迹规划
对于一个确定的斜向运输装置,装置运行路径是已知的。如图9(a)所示作出运行路径,假设平台运行路径为:
令s=0.005 m,i=2,L=0.8 m,d=0.4 m,b=1.68 m,c=1.68 m,通过代入数值求解并通过MATLAB进行曲线拟合[67],得到轿厢水平加速度、底部滑车倾角、电机转速(负值表示电机反向转动)随时间的变化曲线如图9所示。
3 结束语
设计出一种用于山顶雷达的斜向运输装置,其中导向系统实现了轿厢和对重在运行过程中的限位导向;曳引绳调节装置、限速绳导向装置解决了曳引绳和限速绳在变坡度地形上干涉和飘绳的问题;厢体调节机构解决了斜向运输装置在运行时厢体倾角需要不断调节的问题。
建立了斜向运输装置的物理模型及无摩擦力时的力学模型,得出电机转速随时间变化的函数关系,代入数值求解得到相应的变化曲线,解决了人员乘坐轿厢时存在水平加速度而感到不适的问题,给出厢体运行过程中电机具体的调节转速随时间变化的数值结果。