一种适用于无人艇平台的慢速小目标检测方法
2020-06-23张恒,宋佳,林鹏
张 恒,宋 佳,林 鹏
(中国船舶重工集团公司第七二三研究所,江苏 扬州225101)
0 引 言
随着无人化平台技术的快速发展,无人艇技术已经成为近年来国内外研究的新热点。无人艇在自主航行时,不可避免地需要艇上雷达提供周围环境目标的感知信息,为远程航路规划和近程障碍物避碰提供必要的导航信息。因此,针对渔船、浮标、渔网等慢速小目标的检测性能直接关系到无人艇的航行安全和任务执行。
由于无人艇执行任务环境的特殊性,海杂波对周围目标检测能力的影响最为严重。通常小目标回波信号强度比海杂波还弱,且相对无人艇平台速度低,很难通过多普勒频率在信号处理中与海杂波进行区分[1],使得常规的雷达目标检测方法作用受限。针对以上问题,本文对目前较为热门的检测前跟理论进行了分析,并提出了一种基于动态规划和Kalman滤波的改进TBD 处理方法。
1 目标检测方法
目前雷达系统通常都采用先检测后跟踪(DBT)技术来进行目标信号的检测与跟踪。其主要原理是首先对回波信号进行杂波抑制和脉冲积累,然后对原始单帧回波数据设置门限,进行门限检测,从而提取点迹,最后对多帧数据进行处理,从而实现目标的检测与跟踪[2]。典型的DBT 方法流程如图1所示。
针对无人艇平台下导航雷达对海面慢速小目标的探测需求,常规的DBT 检测方法存在以下问题:

图1 DBT 算法流程图
目标检测门限难以平衡;检测门限较低会引入大量杂波干扰,检测门限过高则可能引起小目标丢失,虚警率上升。这2种情况都不利于无人艇的航路规划和自主避碰功能。针对此问题提出了一种检测前跟踪的处理算法。该方法可以在现有雷达处理系统的基础上,通过调整后端处理方法,实现对目标的有效跟踪。其主要思想是通过批处理多帧雷达数据,获得多帧数据的能量积累,得到目标轨迹,最后得到对目标的检测和判决[2]。典型的TBD 算法流程如图2所示。和常规的雷达信号处理方法对比,TBD 算法的优点在于不再采用单帧数据检测,而是通过多帧数据进行检测判决,对可以充分利用目标的原始信息,实现目标的检测前跟踪,降低海杂波虚假航迹,提高雷达系统的整体检测性能。同时由于不再对检测后数据进行庞大的航迹关联处理,有效减少了硬件计算压力。

图2 TBD 算法流程图
因而,TBD 技术在对海面小目标检测与跟踪这一领域具有独特的优势。常用的检测前跟踪算法有Hough变换法和动态规划法[3]。
2 基于动态规划的检测前跟踪算法原理
传统的基于动态规划的检测前跟踪算法(DPTBD)原理为,设一点目标在雷达所在的二维观测区域做匀速运动,观测区域所在的二维平面的x轴的分辨单元数为N x,y轴的分辨单元数为N y,则此点目标的基于动态规划的检测和跟踪问题可以用目标的状态转移方程来表示[4]:


假设在k时,某分辨单元(i,j)的测量值为m ij(k),则时刻k的总观测值是一个矩阵:


式中:m ij(k)独立同分布;A(k)表示目标的幅度信息;w ij(k)表示噪声。
观测目标在时间k的航迹为:

目前基于动态规划的检测前跟踪算法基本原理就是从在已知的采样数据M K={M(1),M(2),…,M(K)}中,利用各帧数据间的相关性,从目标运动方向对I(x k)进行能量积累得到最大值,然后进行检测判据,估计出目标概率最高的航迹:

式中:V为检测门限。
下面进行仿真说明,在观测区域内的检测单元,用6帧数据做关联处理,检测门限V=15,观测目标数据内叠加随机杂波,仿真结果如图3所示。
由图4(a)可知,单帧的小目标数据中由于混进了大量杂波,两者不易分辨,难以对真实目标进行检测,采用6帧DP-TBD 算法进行积累之后,小目标在正确的运动方向进行能量积累,I x k( )的值不断增加,混进的杂波能量无法积累,提高了目标信杂比,通过检测门限后,已能较好地从杂波中区分出目标。
在常规动态规划的检测前跟踪算法的基础上,本文针对海杂波背景下对慢速运动小目标的检测跟踪问题[7],提出采用动态规划和Kalman滤波结合的方法进行TBD 处理。
3 结合卡尔曼滤波的DP-TBD 算法
算法基本思想为:在需要建立起Kalman滤波
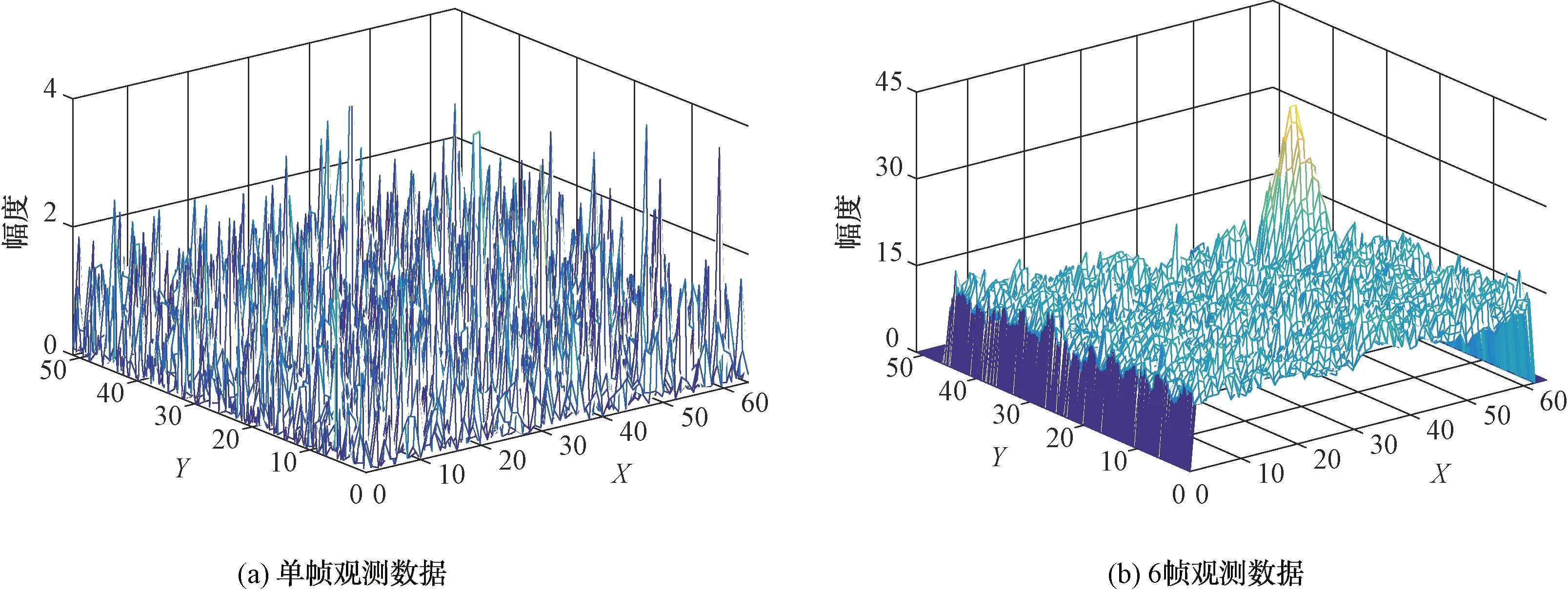
图3 帧积累结果
运动方程的波束数内,首先设置第一门限,这一门限的虚警率较高,以确保目标回波信号能通过,同时有相当的杂波也会通过第一检测门限,然后建立多个可能的目标运动的滤波方程,将下一个波束驻留时间内通过第一检测门限的信号与前面信号进行相参积累或非相参积累,将最大值作为动态规划的阶段目标,回波信号是否在Kalman滤波的关联窗内作为这一阶段优化的约束条件。不同波束驻留时间内积累的信号能量与对应波束驻留数较低虚警率的检测门限进行比较,来确定是否有目标,并通过约束条件来将杂波信号形成的虚假航迹过滤。
设第k帧的扫描矩阵为x(k),测量矩阵为M(k),值函数为I(x k),ψ(k)为多帧之间的状态转移信息,记录了第k帧和第k-1帧状态的关系。结合卡尔曼滤波的DP-TBD 的基本框架及算法流程如图4所示。

图4 结合卡尔曼滤波的DP-TBD 算法流程
根据上面的思路,如果设每次扫描有N个可能的航迹,这N个航迹在当前扫描的预测点位为M n,若设定的检测窗长度为W。设在预测窗内信号的幅度为Z,则有在第K次扫描的阶段优化问题为:
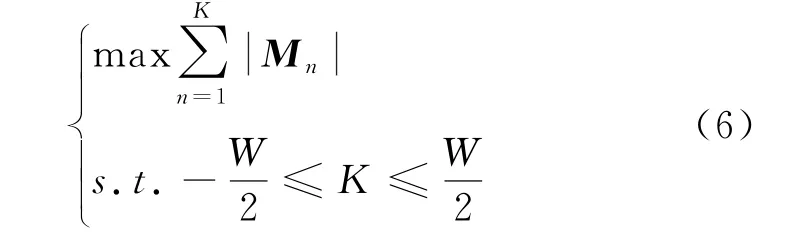
即将第K次扫描的位于TBD 预测目标点位的关联窗内点的最大值,与历史的幅度值进行非相参积累,判断积累的值是否大于检测门限,从而做出目标检测,并在同时给出目标的航迹。
航迹起始是利用可能的目标测量数据形成跟踪滤波算法的初始条件,采用第一门限,该门限设置的虚警率较低,以使得信杂比较低的目标信号也能进入后续的处理流程。然后将超过门限的目标信号提取距离和速度信息,按照常规的Kalman滤波流程建立航迹。
4 仿真分析
下面针对特定场景进行一个仿真,假设海面小目标相对无人艇做径向的匀速运动,运动速度为10 m/s,仿真中的信杂比为0 dB,仿真的情况如图5所示。
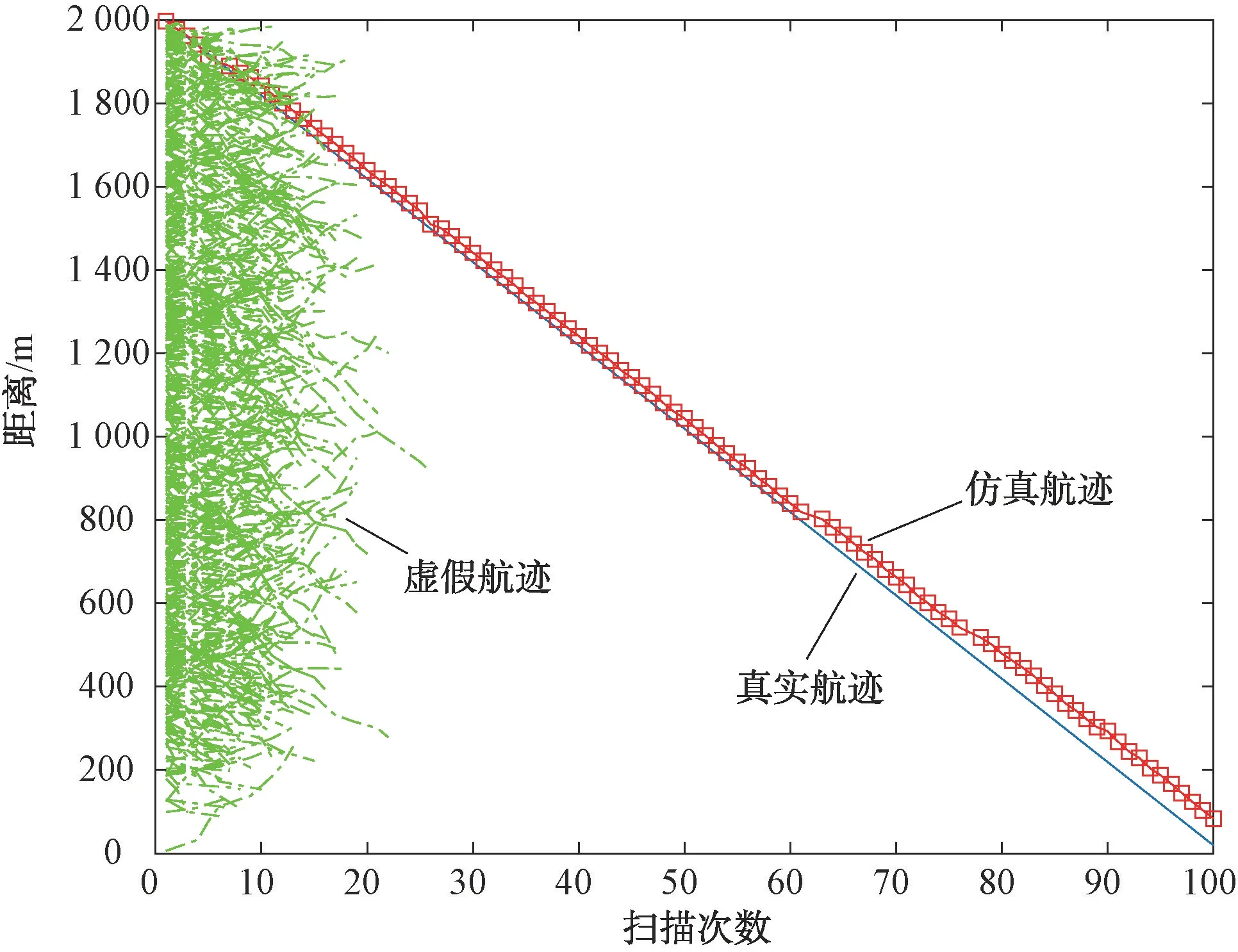
图5 检测航迹
图5为目标航迹情况,直线是目标真实的航迹,离散点部分是改进TBD 算法检测出的轨迹,左侧区域为处理产生的虚假航迹。
图6为扫描次数与目标速度估计的曲线图。直线部分为目标真实速度,离散点部分为改进TBD 算法估计的目标速度,左侧区域部分是虚假航迹的速度估计。

图6 检测航迹的速度
图7是航迹能量积累与检测门限的比较,靠底部直线是检测门限,靠顶部曲线是改进TBD 算法给出的目标积累值,左下角区域是虚假目标的积累结果。
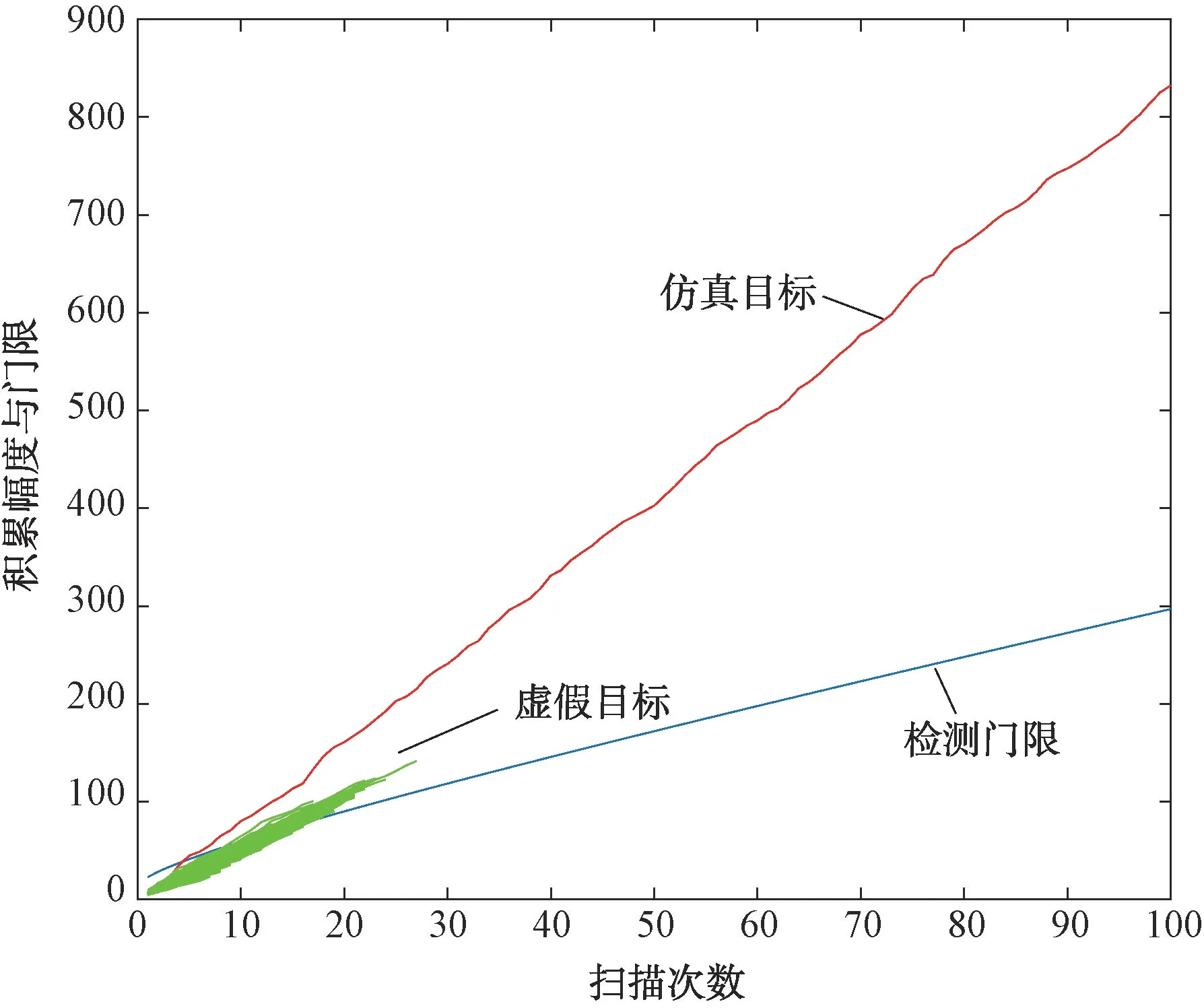
图7 航迹能量积累与检测门限比较
图8是随着扫描次数增加,航迹变化的情况。可见起始时,航迹数较多,随着扫描次数的增加,杂波造成的虚假航迹不断地被剔除,最后只剩下了真实目标的航迹。
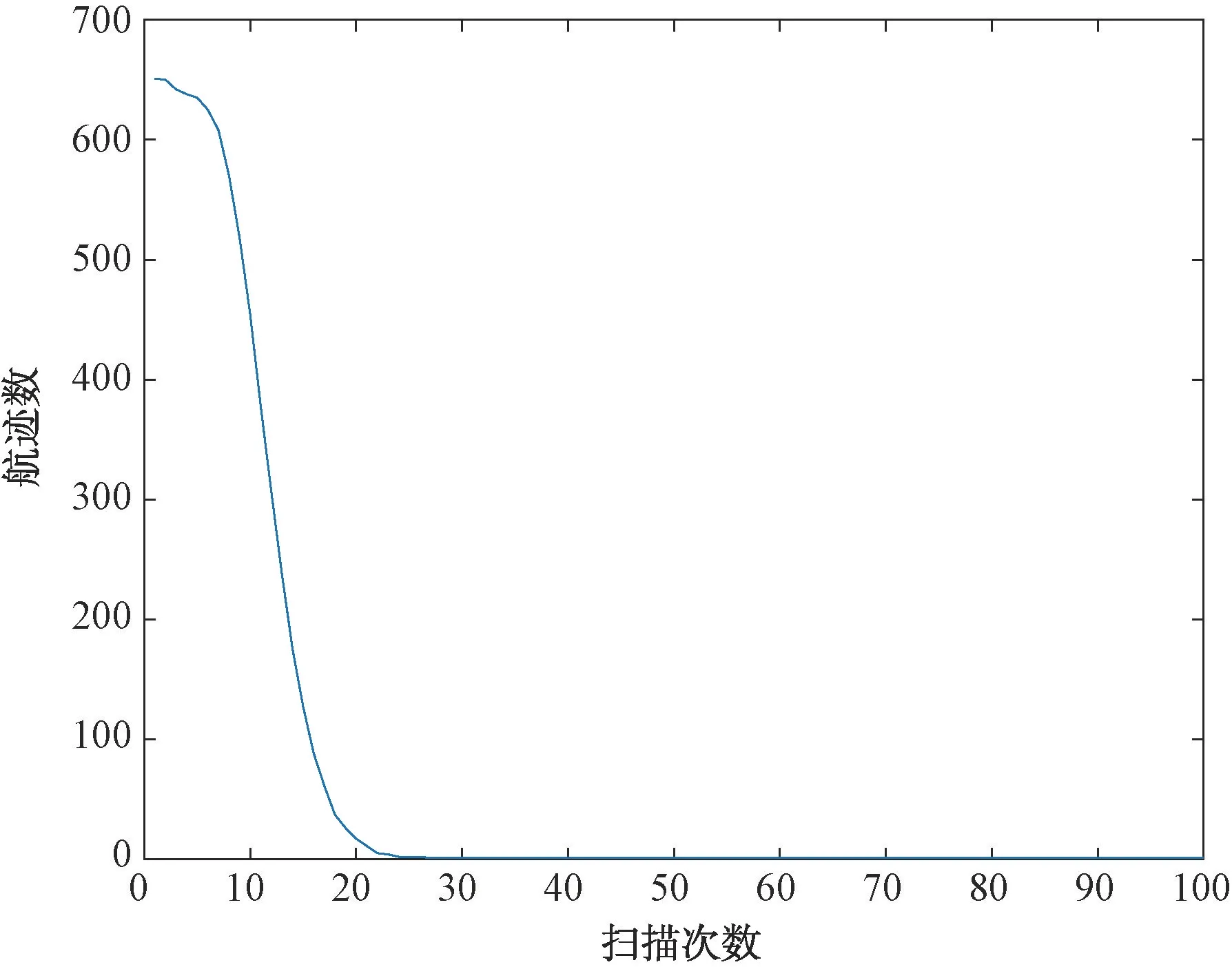
图8 扫描次数和航迹数的关系
5 结束语
无人艇平台的自主航行安全依赖于雷达对海面目标的检测和稳定跟踪,受作战环境的影响,海杂波形成的虚假航迹严重影响对海面小目标的检测性能[8]。本文介绍了一种适用于无人艇平台的检测前跟踪的目标检测方法,对传统的基于动态规划的TBD 方法进行了讨论,最后提出了一种采用动态规划和Kalman滤波结合的TBD 处理方法。仿真结果表明,该方法相比传统的先检测后跟踪技术能更好地滤除海杂波虚假航迹,提高对微弱目标的检测,系统复杂度低,实时性高,具有较好的应用前景。