分布式电驱动城市客车四轮转向控制策略仿真分析
2020-06-23上官荣海
上官荣海
(厦门金龙联合汽车工业有限公司,福建 厦门 361023)
多轴车辆因轴数增加,车身变长,转向时操稳性能变差,为此多轴车辆常应用多轴转向技术以提高转向灵活性和稳定性[1-2]。目前在转向控制策略方面多借助Simulink或Simulink与TruckSim、Adams等的联合仿真来对多轴重型车进行分析[1,3-5]。本文以某分布式电驱动三轴城市客车为研究对象,创建四轮转向的线性二自由度模型,并基于Simulink与Adams/Car的联合仿真模型,对不同转向策略下的操稳性能进行分析,以改善车辆转向时的操稳性能。
1 三轴车二自由度整车模型创建
研究车辆采用后两轴轮边驱动,前、后两轴转向,每侧单胎结构。因为当车辆侧向加速度小于0.4g时,轮胎侧偏特性处于线性范围内,线性二自由度模型能较好地表征车辆转向的实际物理过程[6],故本文将该车辆简化为线性二自由度单轮车辆模型,如图1所示。模型忽略转向系统和悬架的影响,只考虑侧向和横摆两个运动的自由度[7]。
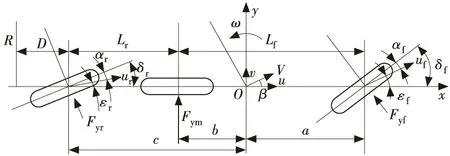
图1 三轴汽车四轮转向二自由度模型
图中,β为质心侧偏角;ω为横摆角速度;u为质心前进速度;v为质心侧向速度;a、b、c分别为前、中、后轴到质心处的距离;δf、δr分别为前、后轮的转角。Lf、Lr分别为前、后轴的轴距;D为瞬时转向中心到后轴的纵向距离。
该车辆中间轴不参与转向,则由车辆沿y轴力平衡及绕质心力矩平衡可推出如下运动微分方程:
(1)
式中:m为整车质量;k1、k2、k3分别为前、中、后轴的侧偏刚度;Iz为横摆惯性力矩。
式(1)可转化为状态方程形式:
(2)
其中
取状态向量X=(βω)T,输入向量U=(δfδr)T,输出向量Y=(βω)T。
2 四轮转向控制策略及仿真分析
2.1 质心侧偏角为零时的四轮转向控制策略
使车辆稳态转向时的质心侧偏角为零,可以提高汽车循迹能力[8]。基于零质心侧偏角的转向控制策略主要有两种:
1) 前轮转角比例控制,也称“比例前馈控制”。前后轮转角成一定的比例关系,即可令δr=Gδf,β=0,代入式(1)得比例系数:
(3)
2) 前轮转角比例前馈加横摆角速度比例反馈控制。在“比例前馈控制”的基础上加横摆角速度反馈,能提高汽车抵抗外来干扰的稳定性[9]。可令后轮转角δr=Gδδf+Gωω,代入式(1)并进行拉普拉斯变换,可得到质心侧偏角对前轮转角的传递函数,再由β=0则可计算出此时的比例系数:
Gδ=-k1/k3,Gω=(ak1-bk2-ck3-mu2)/(uk3)
(4)
2.2 不同转向控制策略的转向性能分析
根据式(2)~式(4),在Simulink中建立该车以上两种不同转向控制策略的模型,如图2所示。
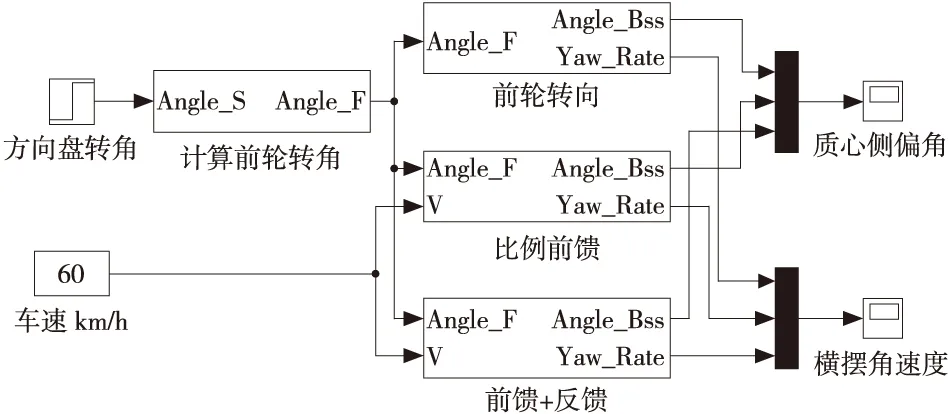
图2 不同转向控制策略模型
进行不同车速下的阶跃转向仿真:方向盘从0.5 s 时刻开始,在0.1 s内转过90°,车速为10 km/h和60 km/h,输出的不同转向控制策略下的质心侧偏角响应和横摆角速度响应如图3和图4所示。
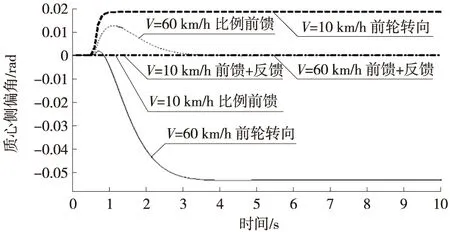
图3 线性二自由度模型质心侧偏角响应
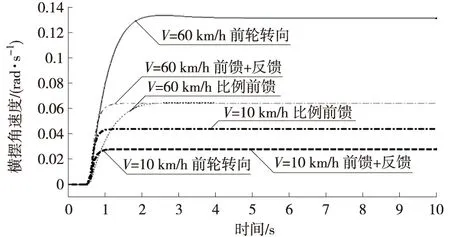
图4 线性二自由度模型横摆角速度响应
从图3可知,在低速和高速情况下,“比例前馈控制”和“前馈+反馈控制”的质心侧偏角均能达到零,而前轮转向的质心侧偏角始终不为零,说明两种控制策略都能使车辆在转向时有更好的循迹性能。从图4可知,低速转向时,两种控制策略控制下的横摆角速度比前轮转向的大,说明在两种转向控制策略控制下,车辆转弯半径更小,转向更灵活;高速转向时,横摆角速度值相比于前轮转向的值均下降过大,导致车辆有过多的不足转向,降低了高速转向时的灵活性,增加了习惯于驾驶传统前轮转向汽车的驾驶员的负担。
3 联合仿真分析
上述二自由度模型经过了线性假设和简化,而实际车辆包含有许多非线性因素[10]。为提供更具参考价值的仿真结果,本节基于Simulink和Adams/Car建立四轮转向的联合仿真模型,并进行转向控制策略的仿真分析。
3.1 四轮转向汽车虚拟整车模型的建立
在Adams/Car中建立车辆的虚拟样机模型,包括:前中后悬架系统、转向系统、制动系统、驱动、车身(简化为质点)、轮胎模型等[11]。其中,在转向系统中添加用于控制后轮转角的状态变量,其值由转向控制策略计算而来;在后四轮中添加运动副作用力制动器,用于模拟驱动电机输出力矩,其值由在Simulink中建立的电机模型输出。虚拟整车模型如图5所示。

图5 联合仿真虚拟整车模型
3.2 驱动力矩计算及电机建模
1) 驱动力矩计算主要为了实现目标车速。以目标车速和虚拟整车模型实时车速的偏差作为控制变量,通过PID算法控制速度差得到整车行驶所需的驱动力矩。
2) 车辆各驱动轮力矩按各轴轴荷比进行分配。因后两轴的轴荷相同,车辆无横摆力矩时各驱动轮上的驱动力矩相等。驱动电机采用直接转矩控制的方式,通过查表使输出力矩满足电机外部特性要求[12]。根据电机测试得到式(5)所示的电机转矩响应特性传递函数G(s),并在3.3中建立电机模型。
G(s)=Tout/Tobj=1/(2ξ2s2+2ξs+1)
(5)
式中:Tout为电机实际输出转矩;Tobj为输入电机的目标转矩;ξ为电机常数,这里取0.01。
3.3 建立联合仿真模型
应用2.1、3.1及3.2节的模型,建立Simulink和Adams/Car的联合仿真模型,如图6所示。
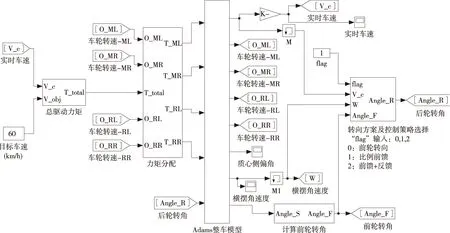
图6 Simulink和Adams/Car联合仿真模型
图6中,由虚拟整车模型输出实时车速和驱动轮转速,并结合目标车速计算总驱动力矩和各电机输出力矩;方向盘转角由工况控制文件定义,通过转向控制策略计算出后轮转角,再加上电机输出的力矩一并输入到虚拟整车模型,从而构成闭环控制系统,实现四轮转向控制的联合仿真。
3.4 仿真结果分析及控制策略改进
联合仿真采用2.2节所述的阶跃转向工况,仿真结果如图7和图8所示。

图7 联合仿真模型的质心侧偏角响应
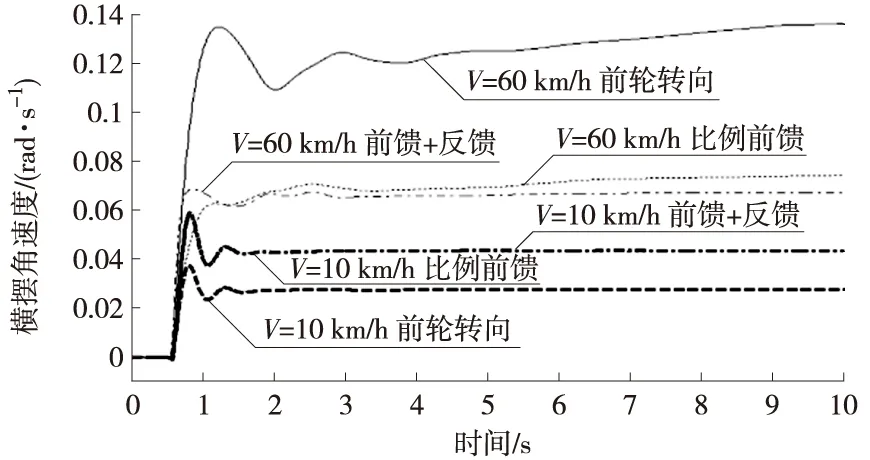
图8 联合仿真模型的横摆角速度响应
从图7和图8可知,相较于前轮转向,在转向控制策略控制下,车辆低速转向时的机动性和高速转向时的循迹性得到提升,但还是存在高速时转向不足、驾驶员负担加重的缺点。同时联合仿真的结果大体上与线性二自由度模型一致,说明本文的线性二自由度模型也能够较好地反映出整车的转向性能,具有较高的参考价值。
实际汽车转向行驶中只有前轮转向、轮胎工作在线性区、有适量不足转向时,车辆稳定性才最好[10]。因此,可利用分布式电驱动的各轮驱动力矩可独立控制的条件,通过改变各轮驱动力矩产生附加横摆力矩,使车辆在高速四轮转向时的横摆角速度跟踪前轮转向的线性二自由度模型(参考模型)的横摆角速度(下文称为参考横摆角速度),以减少驾驶员负担,提高转向灵活性,同时应保持车辆的循迹性能。
分析当车辆左转向时,若参考横摆角速度和实际值的差为正,则车辆有不足转向,此时应减小左侧车轮驱动力矩,同时加大右侧车轮驱动力矩;若差值为负,则车辆有过度转向,此时应加大左侧车轮驱动力矩,同时减小右侧车轮驱动力矩。当车辆右转向时,依左转向的情况类推。据此,本文将附加力矩均分给4个驱动轮,则各驱动轮转矩Ti为:
(6)
式中:T为各驱动轮原驱动力矩;r为轮胎滚动半径;B为后两轴的轮距;M为附加力矩,由参考横摆角速度和实际值的差通过PID控制算法计算得出。
根据仿真结果,只有当车辆在高速转向时,采取在零质心侧偏角前轮转向比例前馈的基础上施加附加力矩调控,而低速转向时的控制策略不变。则改进后的联合仿真模型及采用2.2节阶跃转向工况的仿真结果分别如图9、图10和图11所示。
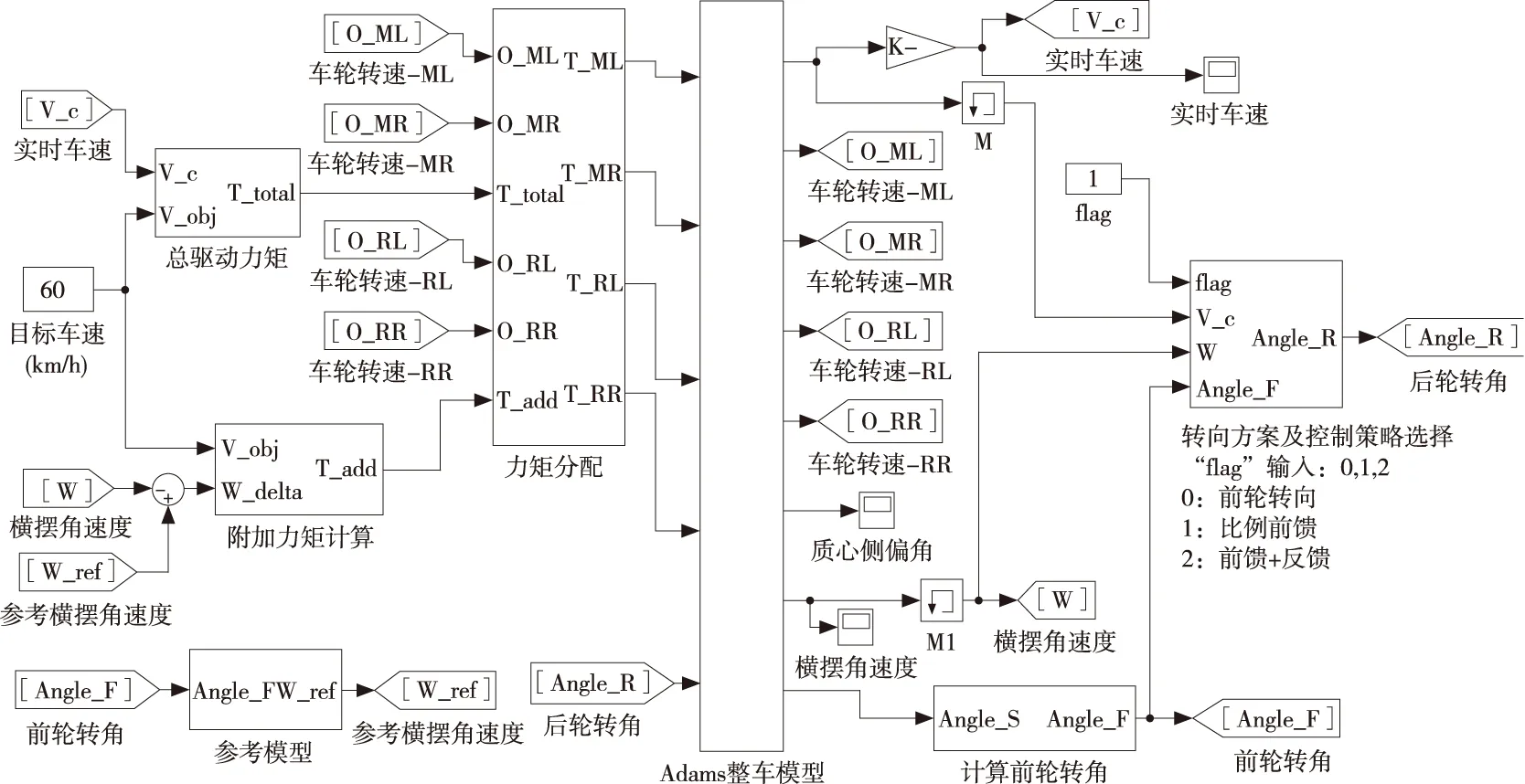
图9 控制策略改进后的联合仿真模型
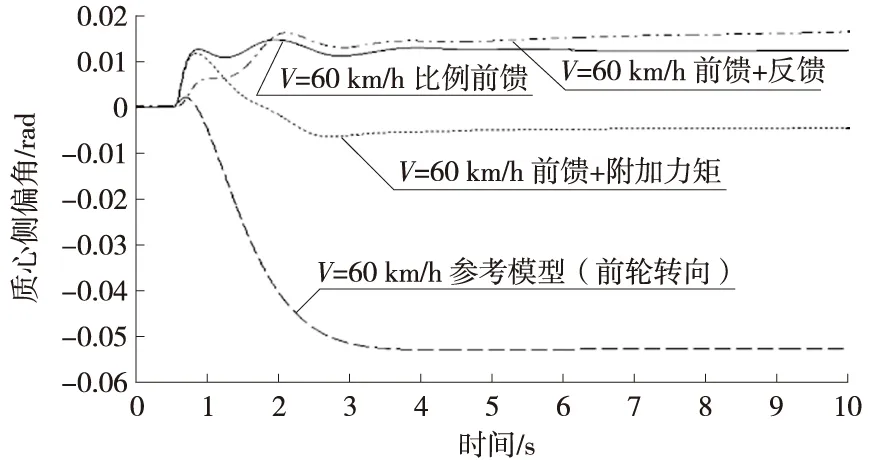
图10 控制策略改进后联合仿真的质心侧偏角响应
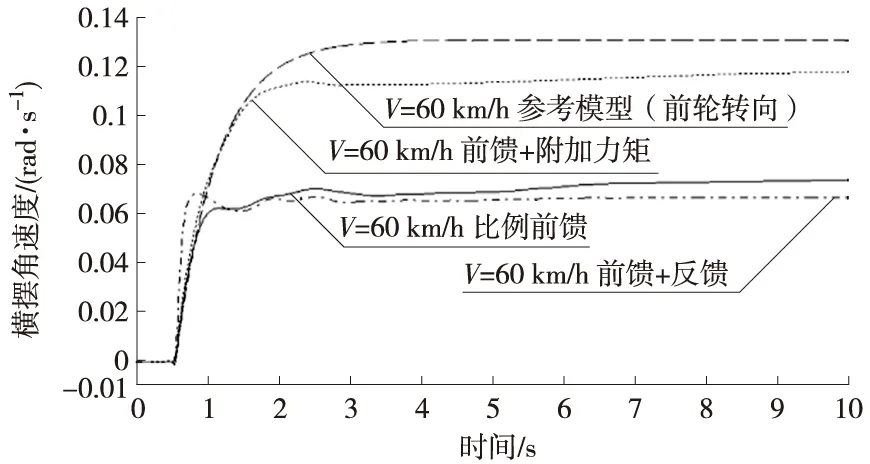
图11 控制策略改进后联合仿真的横摆角速度响应
从图10和图11可知,改进控制策略后,车辆高速转向时的横摆角速度相比参考横摆角速度仍存在一定的偏差,但与改进前比有很大的提高,且响应也更加平稳;同时质心侧偏角也更趋近于零。说明改进后的控制策略改善了原转向控制策略在高速转向时的缺点,使车辆在高速时有更加稳定和灵活的转向性能。
4 结束语
本文以分布式电驱动三轴城市客车的质心侧偏角及横摆角速度为控制目标,制定了基于零质心侧偏角的“前轮转角比例控制”和“比例前馈+横摆角速度比例反馈控制”两种转向控制策略,并进行线性二自由度模型及基于Simulink与Adams/Car联合仿真模型的仿真分析。仿真结果表明,两种转向控制策略下的车辆转向性能优于前轮转向,但在高速转向时存在过多的不足转向、转向灵活性降低、驾驶员负担增加等问题。通过引入附加力矩的调控,可以有效改善此问题,提高车辆高速转向时的操稳性能。