电力线路无人机巡检方案研究
2020-06-21
(贵州电网有限责任公司输电运行检修公司,贵州 贵阳 550000)
随着中国现代科学与技术的快速发展,人们对电能输送的需求越来越多,架空输电线路工程的规模也越来越大。在架空电力线路工程实施完成后,往往需要穿过复杂的地形和险恶的自然环境与生态环境,借助无人机技术实现对输电线路的巡检,以确保架空线路的运行安全,实现输电线路巡检的自动化。
1 无人机巡视检修现状分析
当前,国内输电线路的检测一般依靠人力巡视。在巡视过程中,使用电杆等辅助装置来完成对电力设施的检查。当线路位于野外场景时,作业人员的巡视难度大大升高,特别是在恶劣环境的场景下。而当电力建设规模越来越大时,运行维护的劳动量和强度也随之增大,结果导致作业人员工作强度成倍增加,但是作业效率反而不尽人意。所以,常规的巡检方式对人力资源是一种极大的浪费[1]。同时,常规巡检方式对作业人员的风险也很大,特别是在悬崖、山体等严酷地形,在雨雪冰冻等极端天气下,经常会发生威胁人身安全的情况。
无人机用于电力巡检,融合了航天、通信、视频处理技术等最新科学技术,作为传统巡检方式的替代,这种新型作业形式安全高效,不需要人员爬塔进行检测,操作成本低。目前它已被一些电力企业开始使用并逐步发展,开始展现出替代传统作业方式的趋势[2]。
有了无人机的助力,就可以在电力巡检作业时远程完成沿线路通道的巡视,并同步完成多种电力设施无人型的维护和定位。当前,无人机不但能够用于线路巡检的作业,也可以创造性地运用于电力设施的施工、监理等。而且在电力部门,除了故障排查的紧急情况、线路建设施工尾期的投运验收工作以及不停电作业等情况外,可利用无人机在人力无法或难以到达的地理区域进行检测或作业,并能在不爬塔的情况下完成检查工作,人工逐步替代人力巡视,减少电工人身安全威胁[3]。
2 无人机选型
2.1 线路巡视特点
将无人机设备应用到架空线路巡视检查中,可以有效地改变大量人力资源的利用效率低和浪费的现象。在目前的价格核算中,无人机巡更还处于初级发展阶段,在实际应用中还存在许多不足,如:①无人机设备体积小、容量小、检测时间短,无法进行超远距离的传输和识别;②无人机设备的遥控范围小,存在距离限制,因此有必要进一步研究拍摄线路缺陷的自动识别问题[4]。
然而,与传统的人工巡检相比,无人机在架空线路巡检中有一些优势:首先,使用悬停和自动导航的无人驾驶设备可以防止电力线的冲击,并提高巡逻和监测的安全性;其次,在恶劣的天气条件下,可以有效发现、分析现有的输电线路问题。
此外,无人驾驶设备分为两类类别:手动和自动。根据自己的需要,可以选择合适的机器类型,在两个特定的应用模式,可以减少需要使用的员工,提高公司输电线路服务的速度和效率。
2.2 无人机参数对比
无人机是人们娱乐中的物品,但一旦无人飞行器有了线路巡检的要求,它的性能和参数就发生了巨大的变化。无人机应具有良好的耐久性、抗风性,并能装配光学装置系统。中型无人机与固定翼飞机的参数比较如表1 所示。
2.3 无人机选择
中型无人机可自动起落,起落模式为自动控制和自动飞行,不需要人工来控制,降低了空间作业事故频率。综合以上因素,中型无人机的优势大于固定翼无人机。如果地势和气候存在差异,应根据差异的巡视需求采用不同的无人机选型方案[5]。
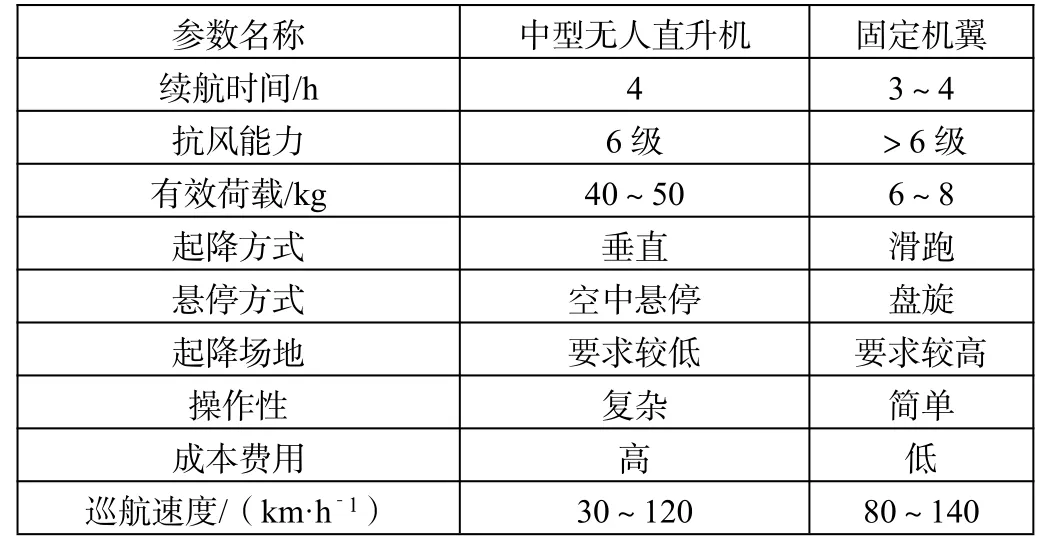
表1 中型无人机和固定翼机参数对比
3 无人机控制方案
3.1 系统设计及构成部分
无人机巡视控制系统包括3部分,分别是无人机飞行控制系统、无人机定位信息系统和数据系统,系统构成如图1所示。
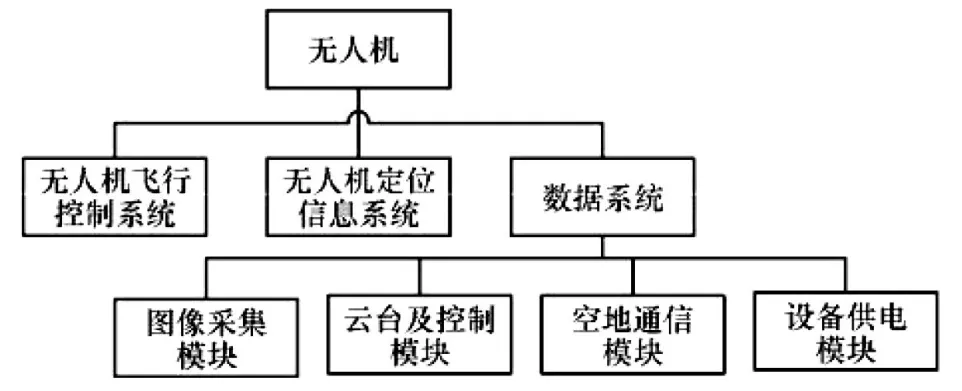
图1 无人机巡视控制系统构成
其中,数据系统包括图像采集模块、空地通信模块、设备供电模块和云台及控制模块。图像采集模块对无人机拍摄采集的图像进行杂波滤除、噪声去除、信息提取等一系列图像处理;空地通信模块主要将采集到的数据输送到监控单元进行进一步的分析和判断;设备供电模块为采集模块和通信装置;云台及控制模块为准备好采集的摄像机提供拍摄角度和各种设置。图像采集模块存在图像去噪的优化问题,传统去噪算法的不一定适用与无人机巡线,但采用基于感知的矩阵恢复方案去除成像噪声,可以得到满足实际工作要求的结果。
3.2 飞行航线的生成方法
当无人机接近架空线路时,通常采用两种飞行方式:①定高飞行方式。用这种方法,首先选择合适的着陆位置,然后无人机精确定位起点,设定起点高度。通过这种控制方法,当相应的性能参数为定值时,可以显著降低故障率。②斜飞方式。特别是在仔细部署了无人机设备后,直接从起飞站出发,向不同的方向移动,通过这种飞行模式,可以快速接近控制目标,提高测试速度,但同时,因为必须双手同时行动,因此会增加控制难度,提高工作失误率[6]。
在使用无人机巡逻设备之前,必须先规划航线,通常是三角和线性航线。如果设计水平三角路线的起点和范围,则无人驾驶器可以进入传输线保护区而不影响架空线路,但如果采用这种路由规划方法,则很难检查操作者所需的设备并掌握设备控制技术进行准确判断和控制。与三角形线路不同,直线线路更适合地形平坦、跨度较小的线路。在拍摄无人机设备时,要求路线通畅,以保证拍摄效果。
3.3 飞行速度及飞行姿势控制
在无人机巡视过程中,由于天气环境变化,无人机的前进角度经常出现偏差。为了保证无人机和电力线路的稳定,控制无人机的前进姿态显得非常重要。无人机测控的原理是利用LQG 控制器控制无人机仰俯和方向变换时的姿态。当无人机悬停于空中,可以通过绳子施加外力,保证无人机的飞行的稳定性。
获得关于小无人机飞行方向、加速和其他飞行地点的信息,应以下列条件为基础:①鉴于无人机有效载荷的限制,位置信息不应过于烦琐,总费用也不应过高;②该系统具有良好的声学角、旋转角和旋转角的测量和控制精度,这些精度目前被定义为声学角小于0.75°,旋转角小于1.5°;③鉴于无人机的蓄电池容量减少,整个设施系统需要低能耗运行,以降低长期的工作量;④由于远离某些子电站或高压塔,系统还必须能够存储数据,以避免由于移动电话信号不足而造成数据丢失;⑤定位算法应足够稳定,以避免无人驾驶航空器飞行位置计算结果的突变和分散。
无人机飞行姿态信息采集子系统的结构如图2 所示。
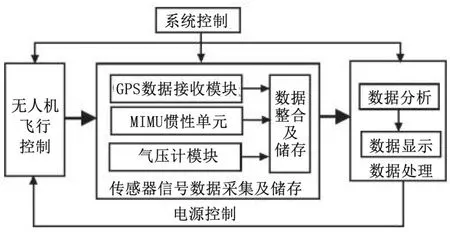
图2 无人机飞行姿态信息采集子系统的结构框图
硬件部分包括系统控制的微处理器模块和全球定位系统的接收模块、用于检测异常机器宽度信息的数据记录模块和MIMU 惯性模块。处理位置信息后,无人机飞行控制子系统对飞机进行飞行控制跟踪。
4 图像处理方案
4.1 图像数据的传输
影响无人驾驶航空器数据传输质量的两个主要因素,一是组合和空间通信的各种阻尼因素严重影响信号的正常接收,二是飞行结构的改变也影响信号的接收。选择性的频率阻尼信道和多相陆地和空中缓冲信道可提高数据传输的质量。
4.1.1 空间分集接收平衡
为了应对陆地空间中的各种阻塞因素,在无人机的不同部分引入了一个双天线系统,以便在降低传输阻尼时提高传输效率[7]。为了消除无人驾驶航空器不同配置下传输误差,则无法同时覆盖两个天线的主波束,以补偿地对空通道上多个信道的阻尼,在另外一个接收器中增加了一个均衡器,以减小多维缓冲的影响。在这种情况下,场均衡器和频率均衡器可以减小航空轨道的多维缓冲的影响:径信号宽度为σ时,信息宽度为t,扩展宽度为2σ/t<10 时,采用时域均衡器。因为时域均衡器通过提高提取系数来提高其抗多径能力。当抗多径能力达到2σ/T>10 时,分裂数至少达到10 个数量级。如果使用T/2 间隔的均衡器,抽头次数应大于20 步。一方面,增加均衡器线路级的数量将增加算法的复杂性;另一方面,稳定性的波动较小。当两个Si/T>10 时,频域均衡更为合适。信道估计用于实现信道均衡,其抗多径能力取决于调制器帧结构的设计,适用于2σ/T>10 的情况[8]。
图3 显示的无线电结构包括两个不同的接收信道,其中均衡器的信号被发送到组合器的组合件以使组合最大化,结果被传输到错误发生器的决策过程中,其他信道计算决定前后的差值,从而产生用于向前和反馈的调节信号。

图3 均衡接收机结构
4.1.2 LDPC 编码技术
有效的纠错编码是保证降低空信道和在频率有选择衰减情况下分组错误率的关键。同时,前所未有的编码技术可以降低记录阈值,改善连接性,提高信号传输的可靠性。无差错编码技术对强多径干扰下形成的不可恢复的差错码也有很好的抑制效果[9]。
LDPC 具有高的成本效益、高速和并行解码结构,其并行解码结构更适合于设备的快速部署,更适合用户的需要。2 KB/S 是QPSK-LDPC 代码误差曲线和QPSK 代码误差曲线。在下一个图形中,如果信号噪声比大于2.4 dB,则由LDPC-QPSK 编码的比特率低于LDPC 编码,因此LDPC 具有在真空通道中使用小变化参数的良好前景。特别是,由于LDPC 与通信平台的链接,LDPC 代码可以在向FPGA/ASIC传输的复杂条件下同时编译。误码性能如图4 所示。
目前,中国航测图像的摄影校正主要是利用CPU 串行方式对采集到的图像进行变换和修正。随着传感科技的快速进步,需要实现的图像处理量更大。传统的CPU 串行已经无法实现摄影影像采集的需求。在架空线路巡视系统中,无人机可以通过自身的遥感系统获取大量摄影影像,并基于GPGPU 模型,通过一定的信号处理,将其映射到GPU 支持的图形成像系统上,从而实现航测成像的快速修改,大大提高摄影影像的成像速度。

图4 误码性能图
4.2 图像的缺陷识别与处理
图像缺陷识别主要是指地面信号处理中心通过红外、紫外成像系统,POS 系统等传感器对采集到的信号进行精度较高的几何处理,实现对架空线路安全风险的判断和异常架空线的识别,确定架空线路存在的隐患,及时排除故障。其中,多类传感器信息的立体过滤技术要求过滤和输入大量的数据信息,这就需要采用遥感信号过滤计算方案和现代信号过滤方法,从而实现对较大数据量的精度高的立体处理。
图像误差检测必须在实时数据采集之后进行,以便获得高压线路图形转换,使用深分组神经算法过滤和整理数据,然后将数据提交给修复和纠正缺陷的决策系统,并将结果检测和原始图像数据也通过4G 或5G 网络保存在控制中心,由专家人工确认。
深度学习模型利用分层特性图像来描述数据,包括一个有限的钻探传播机制、深度信念网络、自动编译、自动化神经网络和生物刺激模型[10]。
利用神经网络的深度凝缩算法预测通过性能识别装置来获得海量图像或视频数据,最后,测试结果恢复到维护和消除缺陷的决策系统。通过专家反馈优化了测试模式有效性和精度检测缺陷。通过建立深入学习和监督培训,智能识别鸟巢、绝缘子自爆、销脱落、螺栓松动、均压环倾斜塔材丢失、异物、地线损坏等。
图像处理在电力检测应用中会遇到很多干扰因素,给电力线路的维护带来很多问题。在信号处理时,远轴区域存在成像差错,大大降低成像的效果,让巡检过程中装置和元件的详细维护效果较差。辐射失真是遥感成像的失真,利用传感技术对物体的反射,干扰对成像的判断和分析。无人机在悬空时受运行姿势、方向差异和物理振动的干扰很大,运行姿势对无人机电气测控的影响特别严重。电力线路周围的自然和生态环境、镜像变化较快,图像分析和成像使得传输线及其组成部分的图像背景非常复杂,内容识别更困难。
5 结论
使用无人机设备来检修架空线路,不仅满足了新时期的电网维修需求,而且在某种程度上提高了电力公司的业务效率,保证了架空线路的高效安全的状态。因此,在架空线路巡视检修过程时,架空线路所属企业应重视无人机的使用,以提高架空线路所属企业的经济效益。
