基于车联网的营运车辆驾驶行为分析
2020-06-19张晓博陈熙
张晓博 陈熙
【摘 要】对营运车辆的驾驶行为进行深入分析是预防发生交通事故和提高道路行车安全性的一种重要手段。文章首先对采集到的车联网数据进行清洗、分段、筛选,然后利用熵权—主成分分析法(Entropy Weight-principal Component Analysis)建立行车安全评价模型,从样本中选取30辆车进行打分、排名,分析其行驶安全状况,最终得出行驶强度指标在评价司机行车安全方面具有重要的地位。
【关键词】行车安全;熵权法;主成分分析
【中图分类号】U492.8;TN929.5;TP391.44 【文献标识码】A 【文章编号】1674-0688(2020)05-0061-03
近年来,随着我国社会经济的快速发展,交通运输业迎来了前所未有的挑战。就2018年而言,我国汽车保有量增加了228 5万辆,总数达到了2.4亿辆,驾驶人员增加了245 5万人,总数达到了4.09亿人。在汽车数量与日俱增的今天,如何提高道路安全性显得尤为重要。所以,我们应对道路运输状况进行全面监察、对破坏道路安全的行为进行严厉的惩处,从而达到提高道路运输安全性的效果。
迄今为止,国内对营运车辆驾驶行为的研究已经取得了一定的成果。在探索营运车辆安全行驶方面,杨曼等人[1]发现平均减速度、行车安全事件(CIEs)类型和原因、天气等对驾驶风险有显著影响;雷财林等人[2]则是借鉴人工智能领域的粗糙集理论,对道路安全状态进行了客观评价。在对车辆行驶安全评价模型的研究中,大多数学者采用的是具有较强主观性的专家打分法[3]、层次分析法[4,5]或是二者结合的方法,但上述方法不仅对评分者的专业素养有较高要求,而且还要求评分者擁有与研究问题相关的背景知识。本文将基于给定的车联网数据,通过绘制经纬度路线图分析运营车辆的行驶规律;利用主成分分析提取主成分,用熵权法对各个主成分赋予权重,最终得到每辆车的安全评价综合得分[6,7],为判断车辆的行驶安全性建立了安全评价体系。
1 营运车辆驾驶行为大数据的整理与筛选
本文使用了第七届泰迪杯全国大学生数据挖掘竞赛C题数据,共计450辆营运车辆行驶信息。车联网数据是通过卫星定位实时测量车辆的地理位置信息、点火熄火状态、行驶方向角、左右转向灯状态、手刹脚刹状态、GPS速度及GPS里程等信息,数据量大,通过这些数据可以评判车辆驾驶行为的安全性。但由于车载设备的故障、信号失灵等致使收集到了一些无效、缺失、错误数据,对研究造成了困难,且数据信息采集量大,给样本处理带来了困难,所以本文通过对数据进行清洗、筛选、分段等提高数据质量。
1.1 驾驶行为特征参数定义与提取
本文中的数据清洗、筛选、分段等都是通过python3.6实现。从所给车辆信息行驶时间段可判断出所给车辆为货车。利用python3.6中的folium包对所记录时间内的运输路线进行绘制,发现车辆为货车且行驶路径多为国道。通过在网上查阅相关资料,对车辆行驶特征指标定义如下。①超速:由于行驶路径多为国道且具有运输时间长的特点,所以设定车速超过限速的80%(达到64 km/h)则有一定的超速倾向;②怠速和超长怠速:怠速是指车辆处于点火状态、实时速度等于0且时间大于5 min,小于15 h,当怠速时间超过15 h,即为超长怠速;③急加速和急减速:当速度变化绝对值大于或等于2.22 m/s2,且持续2 s以上即急变速;④车速标准差:分为两类,一是根据每辆车的行驶速度计算出每辆车的车速标准差,二是根据已经选出一辆车不同的行驶日期计算出行驶中一天的车速标准差;⑤疲劳驾驶:连续驾驶4 h且休息少于20 min;⑥平均行驶速度:行驶里程数除以行驶时间(对数据进行分段处理,剔除掉速度连续为0的时间,计算每段对应的车辆行驶时间和行驶里程,缺失时间数据按采集到的平均行驶速度数据进行填补和复原);⑦行驶总里程:以车载设备开始记录的时间为起点,以车载设备记录的结束时间为终点的全部行驶里程;⑧行驶里程:剔除因部分数据缺失,漏统行驶时间和行驶速度等信息,而统计到总里程中的里程;⑨行驶时间:剔除速度连续为零的数据后的行驶时间总和;⑩日均行驶里程:行驶里程与行驶时间的比值。
2 基于熵权——主成分分析[6]的行车安全综合评价
在已有数据条件下,本文选取行驶时间(单位:h)、行驶里程(单位:km)、疲劳驾驶时间(单位:h)、疲劳驾驶次数、怠速总数(怠速、超长怠速次数总和)、怠速次数、行驶平均速度(单位:m/s)、日均行驶里程(单位:km/d)、急变速总次数(急加速、急减速次数总和)及超速次数作为评价指标。考虑到各指标之间可能存在一定的相关性,所以本文将通过主成分分析提取主成分等操作对变量进行降维处理。
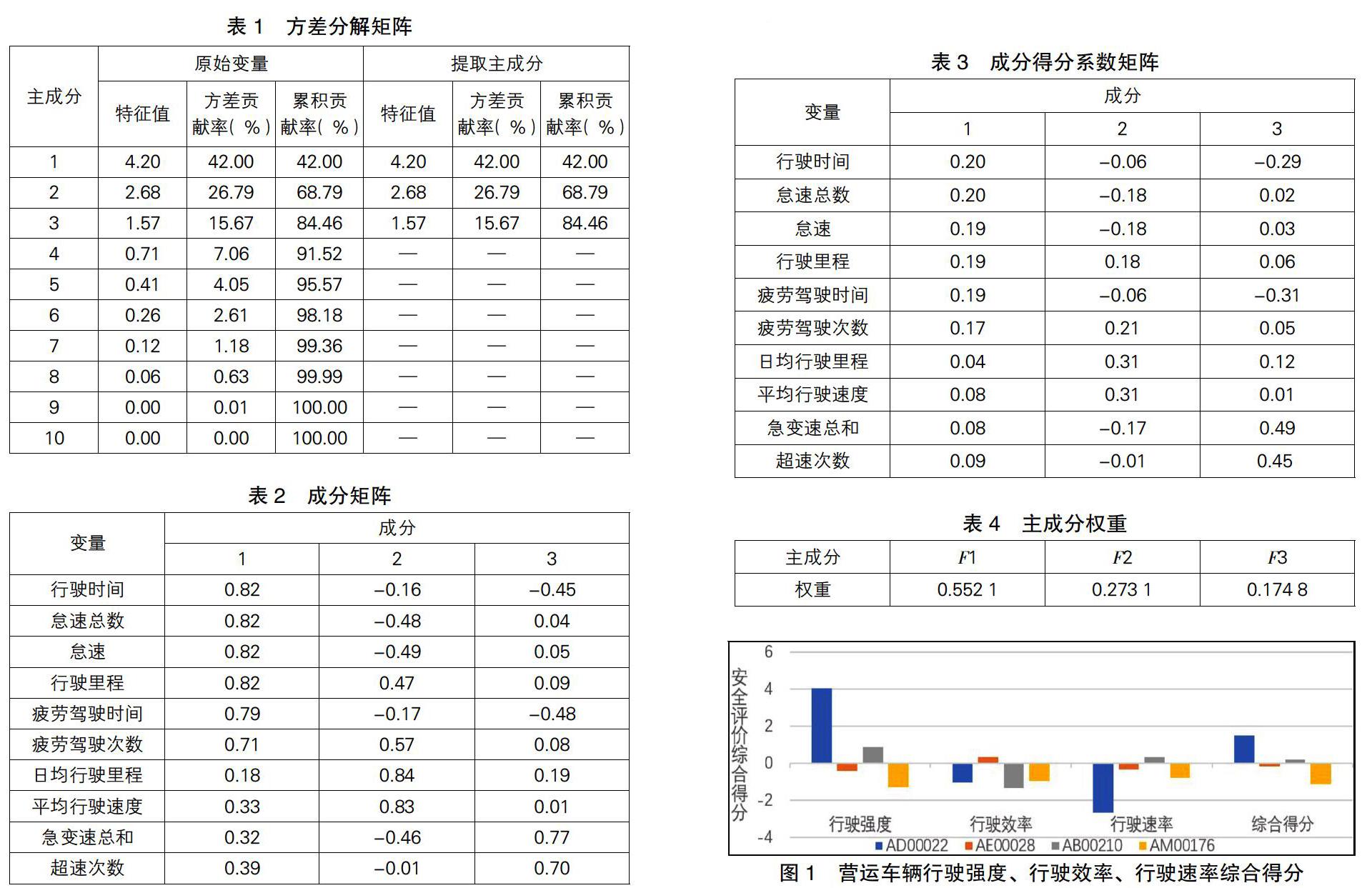
在进行主成分分析前,先对变量进行相关性检验,检验结果显示,10个变量之间存在一定程度的共线性,且Bartlett球形检验结果显著。因此,判定选定变量适合采用主成分分析。由于通过SPSS进行主成分分析时会自动将量纲不统一的变量进行标准化处理,因此不用专门对变量进行标准化处理,得到的方差分解矩阵见表1。
表1给出了各个成分的方差贡献率及累计贡献率。选取特征值大于1的主成分分别记为第一主成分F1、第二主成分F2及第三主成分F3。第一主成分能解释的方差占总方差的42.00%,前3个主成分的方差累计贡献率达到了84.46%,因此运用前3个主成分基本可以对行车安全进行全面概述。表2为主成分分析的成分矩阵,将选定的10个指标化为3个主成分,展示如下。
根据表2中各指标的载荷贡献大小,可以将主成分划分如下。①行驶强度:行驶时间、怠速总数、怠速、行驶里程、疲劳驾驶时间、疲劳驾驶次数;②行驶效率:日均行驶里程、平均行驶速度;③行驶速率:急变速总和、超速次数。对于确定的3个主成分,可以得到成分得分系数矩阵,结果见表3。
针对选取的30个车辆样本信息,根据成分得分系数矩阵,可以分别计算出每辆车的各主成分得分F1、F2、F3,计算出的结果既有正值,也有负值。
在得到每辆车的各主成分得分后,需要对各主成分赋予适当权重,以便对每辆车的行驶行为进行评价。在以往的研究中,大多数人会采用专家评分法[5]给予各主成分不同的权重,但该方法具有较强的主观性,如若判断有误,会对研究结果产生严重影响。因此,本文选择采用客观性较强的熵权法[6]对各主成分进行赋权。通过python3.6编写代码,利用熵权法对3个主成分赋予权重,结果见表4。
将计算出的30辆车的各主成分得分F1、F2、F3和表4中赋予3个主成分的权重相乘,可以计算出30个样本的综合得分F,具体计算公式为F=α1F1+α2F2+α3F3。评判标准为最终得分F越高,行车就越安全。由最终的计算结果可知,30个样本中车辆AD00022得分最高,为1.47,而车辆AM00176得分最低,为-1.34。对于未入选样本的420辆营运车辆,同样可以采用所建立的指标体系計算车辆的综合得分,从而对车辆的行驶安全性进行评价。
本文最终选取排名第一、排名最后及排名居中共计4辆营运车辆,对它们的行驶安全性进行比较分析,图1为4辆营运车辆的各主成分得分和综合得分条形图。
由图1可知,在行驶效率方面,车辆AE00028表现最佳;在行驶速率方面,车辆AB00210表现最佳;车辆AD00022在行驶安全性方面表现最佳。虽然车辆AD00022在行驶效率和行驶速率方面的表现不尽如人意,但它在行驶强度方面的表现却远远高于其余3辆车,且前文通过熵权法对行驶强度F1赋予的权重高达55.21%,因此车辆AD00022最终的综合得分最高。
3 结语
本文首先对获取的车辆行驶信息通过python3.6进行路线还原,然后利用熵权-主成分分析法进行车辆行驶安全指标体系构建,并对样本数据完整程度较好的30辆车进行综合打分,获得正向得分越高的车辆行车越安全。由于行驶强度在综合得分中的贡献率为55.21%,所以提高车辆的行驶强度是提高车辆行车安全性的关键。
因此,司机在驾驶车辆时,应注意车辆行驶强度,避免疲劳驾驶,减少车辆怠速次数,避免超长怠速情况的发生。车辆怠速会对车辆造成损耗,增加油耗,超长怠速会降低车辆本身的安全系数,对驾驶员的行车安全造成不利。当然,急变速和超速行为也会给行车安全带来负面影响。因此,为了自己和他人的安全,应提高行车安全意识,严格遵守交通规则,安全使用车辆。
参 考 文 献
[1]杨曼,吴超仲,张晖,等.行车安全事件的驾驶风险影响因素研究[J].交通信息与安全,2018,36(5):34-39.
[2]雷财林,钟添翼,蔡晓禹,等.基于车联网OBD数据的道路安全评价方法[J].公路与汽运,2019(1):30-36.
[3]毛喆,严新平,吴超仲,等.疲劳驾驶时的车速变化特征[J].北京工业大学学报,2011,37(8):1175-1183.
[4]马聪.基于OBD技术的驾驶行为习惯评价方法研究[D].南京:南京大学,2016.
[5]张弛.辽宁省陆岛运输安全评价指标体系[J].北方交通,2018(6):154-156.
[6]岳斯玮.基于熵权-主成分分析的区域生态承载能力评价分析[J].重庆文理学院学报(社会科学版),2019,38(2):8-15.
[7]范东凯,曹凯.基于主成分分析法的城市道路交通安全评价[J].中国安全科学学报,2010,20(10):147-151.
