基于物联网技术的智能黑板擦
2020-06-18
(华北水利水电大学电力学院 河南 郑州 450000)
黑板擦广泛使用于诸多领域,但平时使用的人工黑板擦费时费力、粉尘飞扬、危害使用者的身体健康。为解决以上问题,本文设计了智能黑板擦。该设计可自动擦除粉笔痕迹,省时省力,同时降低了粉尘飘散对使用者身体健康的危害。
一、系统的总体设计
本文设计的是由直流电动机驱动的履带式黑板擦,电机电枢电压经整流器变压整流、PWM直流降压斩波电路调制后,控制电机转速;采用蓝牙模块将无线终端与单片机控制系统无线连接,实现无线终端控制继电器的功能,利用反转电路控制电机正反转,经传动装置控制黑板擦的移动,通过超声波测距模块反馈黑板擦的位置,工作异常时及时制动。总体设计系统框架如图1所示。
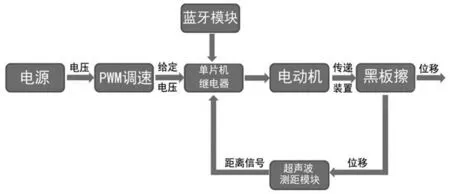
图1 系统总体设计图
二、系统的机械设计
(一)传动装置机械设计。传动装置由齿轮、传动轴、轴承、链条和链轮组成。智能黑板擦由直流电动机提供动力,齿轮与链轮焊接于传动轴,链轮咬合焊接于黑板擦的链条,完成电动机与黑板擦之间的动力传输。
(二)黑板擦结构设计。黑板擦由擦除材料、储粉盒、静电吸附装置、毛刷组成。工作时,黑板擦的擦除面竖直工作,黑板上的粉尘竖直掉落于黑板擦下方的储粉盒中;黑板擦背部的静电吸附装置,更好地清除履带上残留的粉尘,保证了后续的擦除效果;装置周围安装密集毛刷,确保工作时产生的粉尘封闭于装置之内,减少粉尘扩散。
三、系统的电路设计
系统控制电路由PWM直流降压斩波电路、单片机、蓝牙模块、超声波测距模块以及继电器组成。
(一)PWM调速装置的设计。电枢电流为I,电枢电路总电阻为R,每极磁通为Φ,电动机参数为Ke时直流电动机的稳态转速为:
直流电动机的调速方法有改变励磁磁通、改变电枢回路电阻以及改变电枢电压三种。本装置利用PWM技术产生占空比可调的方波,控制直流斩波降压电路的输出电压。
调速原理计算如下:电压变化周期为T,一个周期内高电平持续时间为t1,低电平持续时间为t2时占空比D为:
总电压为U0时,电枢电压平均值U为:
U=DU0
(二)单片机。本装置的控制系统以单片机作为控制核心调整黑板擦的工作状态,工作时,单片机运行相关程序,根据蓝牙模块接收的信息和超声波模块反馈的黑板擦运动情况,共同调整黑板擦的工作状态。
(三)继电器模块。单片机额定输出电压、电流有限,不足以控制大功率的电机,且内部芯片易在电机起动时受损,利用继电器将控制电路与主电路分开。
(四)超声波测距模块。单片机利用声音传播速度和超声波测距模块反馈信号时间差,计算出黑板擦到前方障碍物的距离。其具体工作过程如下所示:1.模块工作,单片机给模块Trig引脚一个高电平信号,模块触发,发送8个方波,单片机开始计时并自动检测返回信号。本单片机采用12M晶振,每过12个方波计数1。则计数器每计数一次,相当于时间
2.当超声波碰到障碍物后信号返回,通过ECHO引脚返回单片机一个高电平中断,停止计数,并将十六位二进制数转换为十进制数,
T1=TH0×256+TL0
由
得出黑板擦与边界的距离S,单位:厘米。
3.当所得距离S临近黑板擦长度或零,即代表黑板擦离边界距离过近,继电器断开,黑板擦停止运动。
(五)控制电路工作过程。单片机接收蓝牙信号,控制继电器;超声波测距模块作为反馈环节,时刻反馈黑板擦的位置信息,在黑板擦即将接触障碍物或者即将到达边界时,给单片机反馈信号,单片机响应中断,黑板擦工作停止。
主电路由变压整流电路、PWM直流降压斩波电路、继电器、直流永磁电机组成。电机电压由变压整流电路、PWM直流降压斩波电路共同调节,实现对黑板擦的调速。两个继电器的通断改变电机电枢电压方向实现调向。
(六)系统部件的选取。根据智能黑板擦需求的功能选择以下电子器件。1.给定装置:蓝牙模块(BT08B),射频通信,低功耗,工作电压为DC3.6~6V。2.控制器:单片机(STM89C51),进行运算处理,工作电压5V。3.执行机构:继电器,主控电路分离,系统更加安全,稳定,工作电压5V。4.被控对象:(1)直流电机,额定电压12V,额定电流5A,功率35W,转速200r/min;(2)黑板擦。5.反馈环节:超声波测距模块(US-100),给控制器反馈黑板擦位置信息,异常时及时制动,工作电压为DC2.4~5.5V。
四、结束语
本文设计了一种拥有擦除粉尘、收集粉尘、调速、无线智能控制功能的智能黑板擦。蓝牙模块、单片机、继电器组成无线控制系统,超声波测距模块作为反馈环节。黑板擦采用履带式结构,提高工作效率。履带背后的静电吸附装置和外壳上的吸尘装置保证了工作的质量,避免粉尘外漏造成环境污染。
