一种基于TOA的非视距误差实时鉴别和抑制算法*
2020-06-17
1 引言
在蜂窝网络定位研究中,基于到达时间(TOA)和到达时间差(TDOA)的定位技术能获得较高的定位精度。移动台(MS)与基站(BS)之间的真实距离只有在电磁波视距(LOS)传播的环境下才能准确测得,然而在复杂的城市环境中,基站和移动台之间的信号大多是通过折射、反射、绕射等非视距(NLOS)方式传播。如何抑制非视距(NLOS)误差对移动台定位结果的影响,是目前研究的重点。
NLOS误差抑制方法通常分为直接法和间接法。直接法在统计NLOS误差特性的基础上,直接对TOA或TDOA测量值进行处理,以减小NLOS误差。例如文献[1,2]中提到的Wylie法利用TOA测量值的时间历史来重构视距的TOA测量值,移动台位置估计误差较小但无法实时定位。文献[3,4,5]使用卡尔曼滤波器(KF)通过测量值和预测值的迭代计算消除NLOS误差,直接估计真实距离。文献[6,7]中残差加权算法是典型的间接法,通过对冗余定位结果进行加权或取舍处理,以减小NLOS误差对移动台位置估计的影响。当有较多基站参与移动台定位时,间接法会有较高的定位精度,但是在实际中难以实现,且当移动台和所有参与定位的基站均为NLOS路径时,间接法的定位精度将显著降低。
本文提出一种NLOS误差实时鉴别和直接抑制算法。首先利用卡尔曼滤波器鉴别TOA测量值是否包含NLOS误差,然后通过使TOA测量曲线整体下移来减小NLOS误差对测量值所造成的正向偏差,再利用重构后的TOA值计算位置信息,能够显著提高定位算法的精度。[1]
2 系统模型

3 非视距误差实时鉴别
鉴于实际城市环境的复杂性,电磁波的传播路径是无法提前预知的,因此准确实时地鉴别NLOS误差是精确定位的重要前提。卡尔曼滤波算法将前一时刻的估计值融入到当前时刻的观测值中,递推估计出下一时刻的状态值,通过状态方程和测量方程的迭代来实现各时刻的状态值估计。
由卡尔曼迭代过程[7~10]可知,在LOS传播环境下,新息被定义为:




由于NLOS误差的正值特性,NLOS环境下距离测量值标准差将远远大于LOS环境下测得的标准差,根据这一特点来鉴别TOA测量值中是否包含由NLOS误差。新息的平方和包含了测量值的估计误差,当移动台与基站之间为LOS传播时,新息平方和矢量的理论值可表示为:

4 视距重构
当鉴别出当前时刻移动台和基站之间传播路径为非视距时,接下来即要重构出视距测量值。在NLOS传播环境中,多项式平滑后得到的TOA距离测量值曲线相对TOA真实距离曲线总是有一个正向偏差,而这个正向偏差值近似为NLOS误差的一部分,若能将TOA平滑曲线整体平稳向下平移,逐渐与真实的TOA距离曲线重合,则可以实现测量值的视距重构。重构LOS测量值的步骤如下:

5 仿真分析
假设理想蜂窝网络中,3个定位基站坐标分别为BS1(0,0),BS2(8 000,0),BS3(4 500,7 500)(单位:m),且移动台从初始位置(300,300)以的速度沿着x轴和y轴方向远离服务基站BS1,标准测量误差服从均值为零、标准差为30 m的高斯分布,NLOS误差为服从指数分布的随机变量,且满足COST259信道模型中的一般市区信道环境。
为了分析本算法的定位性能,在LOS/NLOS状态交互环境下分别采用多项式平滑算法、Wylie算法和本文算法对原始测量值进行视距重构处理,如图1~图3所示。由图可知,适用于LOS环境的多项式平滑算法在该环境下无法准确重构视距值。Wylie算法和本文算法同样通过使原始TOA测量值曲线向下偏移以消除NLOS误差,但Wylie算法的偏移量在LOS/NLOS交互环境中无法随着环境的变化而变化,导致重构值不能够很好接近真实值。本文算法是在实时鉴别原始测量值中是否包含NLOS误差的基础上,利用相邻测量值的相关性对原始测量曲线进行向下偏移,即便在LOS/NLOS交互环境中也能较好地重构真实值。经多项式平滑算法、Wylie算法、本文算法处理后的距离测量值和未处理的原始测量值分别采用EKF算法对移动台进行位置估计,定位误差比较如图4所示。
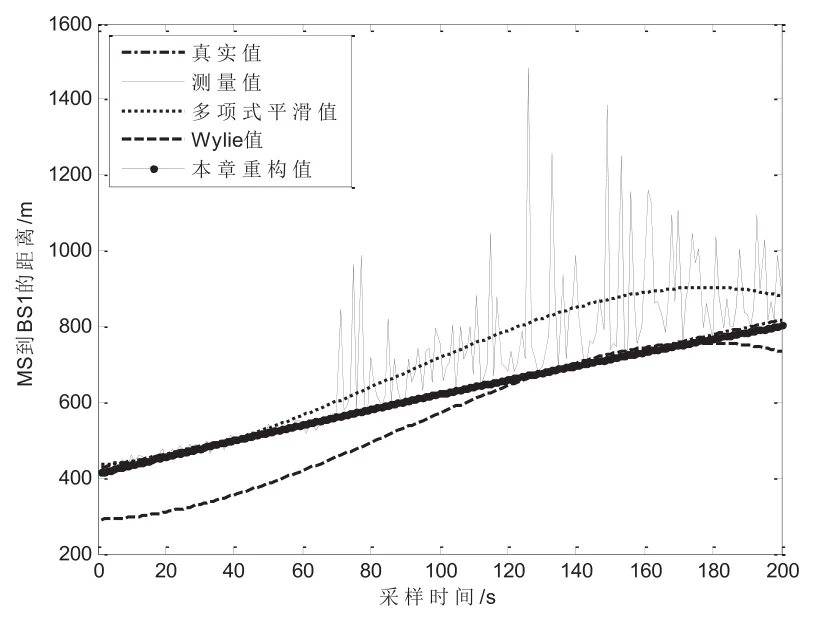
图1 移动台到基站1的距离

图2 移动台到基站2的距离

图3 移动台到基站3的距离

图4 不同传播环境下平均定位误差比较
由图4可知,适用于视距环境的EKF算法和多项式平滑法,在LOS/NLOS交互传播环境下定位误差小于NLOS环境下的平均定位误差。Wylie算法虽然在NLOS环境中定位误差小,但它是利用测量值的时间历史鉴别NLOS误差,无法实时判断,视距重构值偏离真实距离值,动态环境下的定位误差要远大于NLOS环境下的定位误差。本文算法能实时判断测量值是否包含NLOS误差,且对LOS测量值进行平滑处理,在LOS/NLOS交互环境下也能较精确地重构测量值,实现在95%概率下的定位误差不高于84 m,在67%的概率下的定位误差不高于52 m,符合FCC-911需求。
基于以上仿真分析表明,提出的算法在复杂传播环境下可以改善NLOS传播对移动台定位估计的影响,视距重构的测量值能较精确的逼近真实值,实现移动台的高精度定位。
6 结束语
在城市环境中NLOS传播几乎无处不在,鉴别和抑制NLOS误差能有效提高移动台定位估计精度。本文基于NLOS误差的正值特性和相邻测量值的相关性,提出一种非视距误差实时鉴别和抑制算法,利用重构的TOA距离测量值,即使采用传统定位算法也能较准确地获得移动台的位置。与经典Wylie算法相比,该算法能够实现NLOS误差的实时鉴别,可应用在复杂的传播环境中。为了进一步提高本文算法的定位性能,未来的研究方向是如何使值随环境变化的自适应修正等问题。
