多因素影响下的城市道路步行空间盲道评价体系构建*
2020-06-17洪小春刘亚楠
洪小春 刘亚楠 季 翔
(1.中国矿业大学力学与土木工程学院 江苏徐州 221116;2.江苏师范大学江苏圣理工学院-中俄学院 江苏徐州 221116;3.江苏建筑节能与建造技术协同创新中心 江苏徐州 221116)
0 引 言
盲道在不同的国家和地区界定稍有区别,如中国台湾定义为“用于引导视障者行进之设施”[1],日本的解释为“为引导视障者出行而在地面或地板铺设的一种模块凸起诱导地砖”[2],国家标准GB 50763—2012《无障碍设计规范》定义为“盲道是专门为方便视障者出行而铺设在人行道或其它位置上的一种固定形态表面凸起地面”[3]。近年来中国各城镇均大力建设盲道,并将盲道长度作为衡量城市文明水平的标准之一[4]。但在盲道的实际使用中存在诸多问题,盲道的大量建设并未对视障者群体出行产生较大有益影响。近年来,不少学者针对盲人(以下为体现人文关怀,将盲人称为视障者)的出行方式进行了初步探讨,田中直人等[5]通过视障者对导盲设施的使用后评价感受研究发现,视障者认为日常活动中盲道与电子谐音信号对出行帮助较大,其中全盲者主要依靠盲道、电子谐音信号等信息出行,弱视者会依靠残余的视力结合盲道、电子谐音信号、照明等,并参考路上分界线等信息出行;祝长康等[6]阐述了城镇道路盲道设计要求,结合盲道设置的现状问题提出盲道应按照视障者需求在视障者密集区贯通设计、在人流量大及拥挤的地方不设盲道、开发出新的盲杖-盲道信息反馈装置以提高使用效率等盲道设计新理念;赵立志等[7]通过对美、日、德这3个国家城市无障碍建设的对比研究和对中国无障碍建设的发展历史的分析,总结并反思了中国无障碍建设的问题,提出盲道建设应建立专门的评估机构及标准,对盲道建设进行有效评估。针对盲道现存问题及其原因的探讨主要有:洪玉霞[8]从普通市民和市政管理单位角度分析盲道产生问题的原因是盲道知识普及率不够、规划不合理、盲道权责主题不明、对视障者群体关注不够;耿魁等[9]提出应加强宣传、科学规划规范施工、加强监管和维护等建议以提升盲道空间质量。现状文献仅从“所见”问题提出相关策略,目前专门针对盲道现状评价的研究十分匮乏,导致盲道从政策到管理、设计、建设、使用一系列环节缺少科学的评价工具和方法,因此,缺乏合理盲道空间质量改善的决策。
除了为视障者提供出行辅助外,盲道也是城市交通规划的重要考量因素。焦朋朋等[10]提出基于交通效率的城市道路网络优化,将汽车及其相关参数作为道路交通规划的主要影响因素,建立机动车交通主导的城市道路网络优化模型,该方法虽然提升了机动交通效率,但也忽视了慢行交通在城市中的地位;张存保等[11]采取信号交叉口使用手机行为和过街安全性的数据进行统计,发现手机会增加行人与机动车冲突概率,因此除盲道外的语音导航同样有可能干扰视障者过街通行;王秋平等[12]利用鲁棒优化方法建立基于市民需求的慢行交通网络模型,研究结果验证了连续且独立的慢行系统更加稳定。盲道也是城市慢行交通规划的重要环节,实际研究和实践中将结合包含盲道在内的慢行交通规划作为城市道路交通规划主要因素的做法尚未得见到,对城市道路步行空间品质、道路可持续发展和环境安全等评价的研究较多,如刘珺等[13]建立步行行为离散选择模型量化步行空间环境及其影响因素的影响程度来获得权重,进行步行空间评价;陈红等[14]从道路环境、运行环境、设施环境和气候环境4个角度构建隧道运行环境安全性评价指标体系,结合主观赋权和熵权法加权确定权重对六武高速公路隧道作评价,评价体系客观方法严密,可为本研究提供思路指引。
为了合理地评价城市道路步行空间盲道现状,为科学发现盲道现状问题提供理论基础,本研究对盲道的基本概念进行辨析,基于城市道路步行空间盲道的政策制定方、设计建设方、使用方3个角度,选用合适的评价方法,提出城市道路步行空间盲道评价体系,确定各指标评价标度与权重,形成完善系统的城市道路步行空间盲道质量评价方法。不同于传统的交通安全调查和评价,由于视障者群体的特殊性(多数行动不便且大多存在于盲校或盲人按摩院),对视障者在指标构建阶段的访谈、评价阶段的实地体验和对谈得出评价结论等流程均需耗费大量时间和金钱成本,因此本研究样本量较少。
1 盲道评价指标体系构建
1.1 确定评价方法
城市道路步行空间盲道质量评价是一个综合复杂的过程,确定评价指标体系时应充分考虑指标能科学、全面表达盲道现存问题的各个方面。评价指标体系中存在定性指标和定量指标并存的情况,其中定性指标比重大,因此评价方法应能兼顾定性指标和定量指标。层次分析法[15]是一种多目标多准则决策分析工具,是人主观思维条理化的结果,符合城市道路步行空间盲道评价指标体系的特点,因此选用层次分析法确定指标层级与权重。
1.2 评价体系建立流程
城市道路步行空间盲道评价体系构建应建立在满足国家规范、地方标准、视障者的基础上。评价体系形成经历了指标初选、指标筛选、指标权重确定等流程,具体操作流程见图1。

图1 城市道路步行空间盲道评价流程Fig.1 TGSI evaluation process in urban road walking space
1)建立递阶层次模型。对影响城市道路步行空间盲道的影响因素作层次梳理,根据各影响因素之间的关系建立层次模型,确保各指标层和准则层互不干扰。从而构成一个完整的指标体系,该指标体系为上层完全支配下层指标逐级控制、逻辑层次严密的指标体系。
2)建立判断矩阵。判断矩阵也就是成对比较矩阵,由于各层次元素对整体目标的影响度不同,在建立好层次结构以后就要来确定各层次的元素对总体目标的权重[16]。根据1~9重要性比例标度的九级标度法构造准则层和指标层的成对判断矩阵,在使用层次分析法队准则层和指标层分析时,本研究使用几何平均的方法来确定专家和视障者的评分均值。
层次分析法两两判断矩阵见式(1)~(3)。
式(1)~(3)为:判别各指标层组成元素之间的重要性排序,M为总评价指标;V为各指标层元素,式中指标层元素相对于自身的重要性为1。
子元素集Ai={ }Ai1,Ai2,…,Aik中的各个指标层元素相对于子元素集Ai而言,通过两两比较其指标层元素之间重要性判断矩阵见式(4)~(5)。

3)确定准则层和指标层各指标的相对权重。首先根据判断矩阵的结果得到各指标重要性排序,运用乘积方根法求解判断矩阵,然后分别得出单一准则M和Ai下被比较元素的相对权重。

式中,aij的含义为原指标层重要性判断矩阵第i层中第 j个元素;n为该准则层下各指标层指标的个数;为原指标层重要性判断矩阵第i层的几何平均值。
(2)对各行的几何平均值进行归一化处理得到特征向量

式中,Wi为原指标层重要性判断矩阵第i个指标层指标的权重结果;n为原指标层指标个数为原指标层重要性判断矩阵第i层的几何平均值。
(3)计算判断矩阵的最大特征值λmax

式中,aij为原指标层重要性判断矩阵第i层中第 j个元素;n表示该准则层下各指标层指标的个数,λmax表示该研究对象判断矩阵的最大特征值。
(4)计算一致性指标CI和一致性比率CR

式中,当n=2时,该矩阵正反结果一致,因此不需要验证其判断矩阵的一致性;当n>2时,CR计算矩阵的作用就是判断结果是否一致。CR(一致性比率)=CI(一致性指标)/RI(随机一致性)。 RI(随机一致性)取值,见表1。
4)计算各层所有指标的组合权重。得到指标层中所有指标相对于总目标的权重,目标层的权重按照准则层线性加权得到准则层指标权重,将各指标层权重组合,汇总得到最终的权重集合为


表1 平均随机一致性指标Tab.2 Average random consistency index
2 评价体系构建
相较于一般评价体系,由于盲道使用者的特殊和小众,其评价指标的影响因素较复杂,城市道路步行空间盲道影响因素根据不同参与方所承担的功能不能可分为政策规范因素、规划设计因素和视障者需求因素,见图2。

图2 评价体系影响因素的关系Fig.2 The relationship of influencing factors of evaluation system
2.1 政策规范因素
政策因素包含国家、省市区及政府或无障碍管理单位提出的城市无障碍建设政策,规范因素包含以GB 50763—2012《无障碍设计规范》为代表的无障碍相关规范标准。
2.2 规划设计因素
规划因素包含城市道路步行空间相关的市政设施规划、盲道线路规划;设计因素包含盲道线路相关的行进盲道与提示盲道位置关系、城市道路步行空间内相关公共设施节点处的盲道设置等。规划设计因素指与盲道从计划设置到投入使用时间段内对盲道体系形成落地产生作用的各项动作,包含盲道体系的规划、设计与施工等动作。
2.3 视障者需求因素
视障者使用作为盲道建设的最终目的,其对城市道路步行空间盲道的需求是决定城市道路步行空间盲道评价的主要因素。视障者需求因素包括视障者行走在城市道路步行空间盲道上产生的是否安全、是否舒适、是否便捷等直观心理感受。
基于对视障者访谈、对盲道现场调查和深入分析,结合《中国城市步行友好性评价》报告、新建筑方针、城市步行环境评价方法、盲道现状评价的特点、盲道实态调查及对视障者访谈,本研究所讨论影响盲道空间品质指数的因素可归纳为盲道设置规范性、盲道空间步行安全性、使用盲道系统可达性、盲道系统连续性、盲道空间环境舒适性、盲道空间环境美观性、盲道管理满意度等7个方面的29个指标。分别通过向专家和向视障者各发放回收有效筛选问卷20份以确定各级有效指标,将选择“重要”“非常重要”次数达到60%以上的指标确定为有效指标。筛选后的城市道路步行空间盲道评价体系见图3。

图3 评价指标体系Fig.3 Evaluation index system
3 评价指标权重
为了科学、全面的分析城市道路步行空间盲道评价指标的权重系数,采用专家与视障者分别判定的方法,分别求得相应的权重系数并对其综合,从而得到各评价指标的最终权重。为确保研究过程的科学性,本研究制定的评价体系使用来自南京市某道路步行空间盲道作为验证评价体系合理性的对象,因此获取指标权重原始数据的专家和视障者均来自南京市。
3.1 基于专家问卷的指标权重
本研究共发放专家打分问卷23份,回收20份,专家均为来自南京各高校、建筑与规划设计院等单位见表2。利用Excel通过几何平均的方法对打分综合,利用Matlab可以计算规范性、安全性、可达性、连续性、舒适性、美观性等二级指标的集结矩阵,得到结果汇总排序见表3。

表2 专家构成及问卷结果Tab.2 Expert composition and questionnaire results

表3 各级指标对总指标的权重汇总与排序(专家)Tab.3 Weight summary and ranking of indicators at all levels(expert)
3.2 基于视障者问卷的指标权重
由于视障者群体的特殊性,视障者的问卷均来自于课题组访谈问答结果,访谈人员来源于南京手康盲人按摩院、南京盲校等机构。本研究访谈了44位视障者,形成有效访谈40次,得到他们对各指标的重要性评价打分。同样利用Excel通过几何平均的方法对其综合,得到集结矩阵。利用Matlab可以计算所有集结矩阵,将各指标结果进行权重组合计算,得到各指标最终的权重系数及排序见表4。
3.3 专家意见与视障者意见反馈的对比分析
对于影响城市道路步行空间盲道空间质量的要素判定,视障者与专家的所处位置不同思考层面也不同,视障者更多从自身使用的角度出发对各指标进行考虑,专家则是用更专业的角度考虑得更周全。将专家问卷所得权重结果与视障者权重所得结果对比分析可以更客观分析其细微差距,为城市道路步行空间盲道评价提供参考依据。
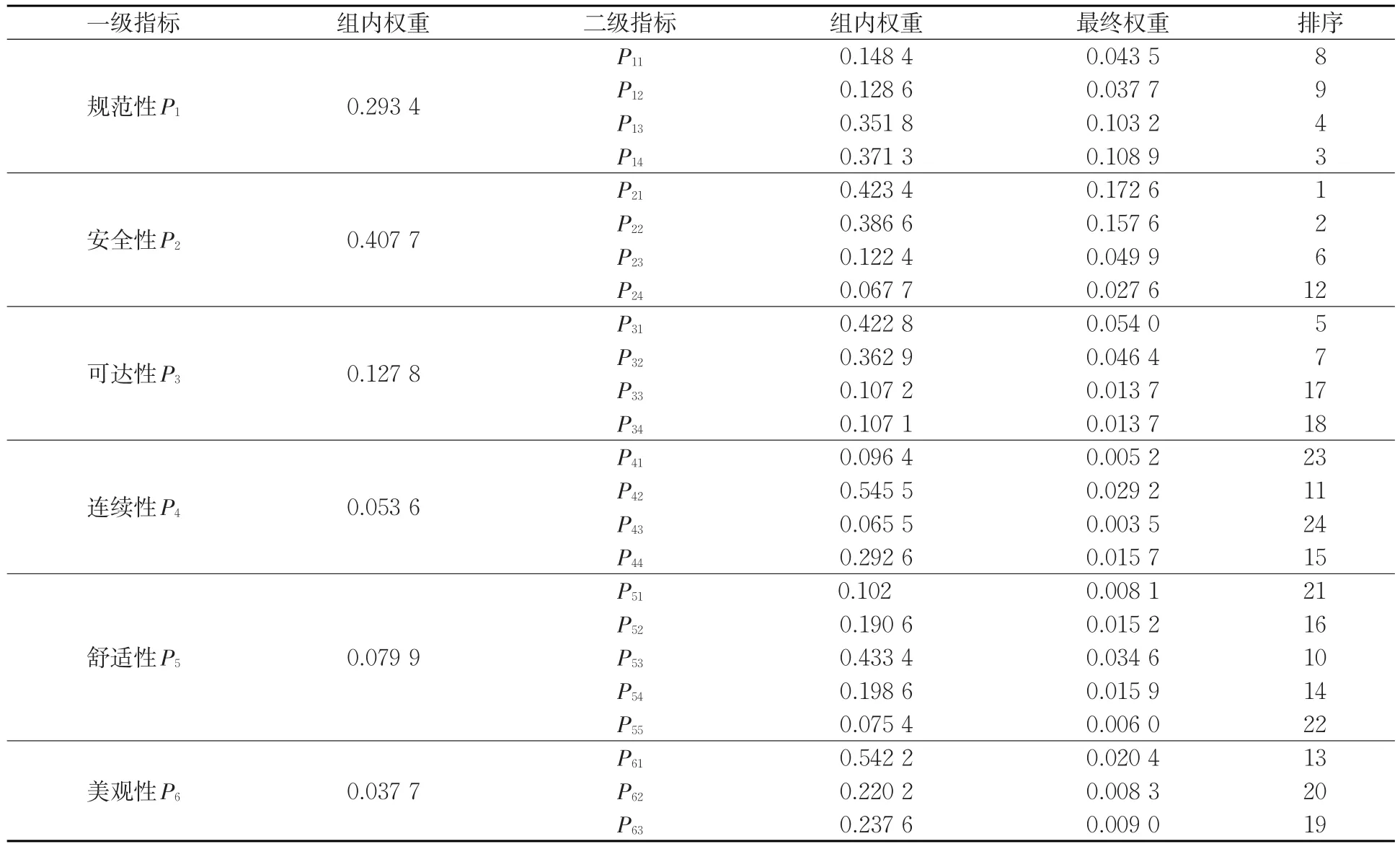
表4 各级指标对总指标的权重汇总与排序(视障者)Tab.4 Summary and sorting of weights of indicators at all levels(blind)
3.3.1 一级指标权重对比分析
无论是作为使用者的视障者还是专家学者均认为“安全性”是影响盲道步行空间质量的首要因素。其次,“规范性”也是专家和视障者所重点关注的因素。专家学者和视障者对可达性和舒适性也有一定侧重,对连续性和美观性的关注相对较小,专家和视障者对应的一致指标权重分布见图4。

图4 专家与视障者一级指标权重对比Fig.4 Expert and blind primary index weight contrast
3.3.2 二级指标权重对比分析
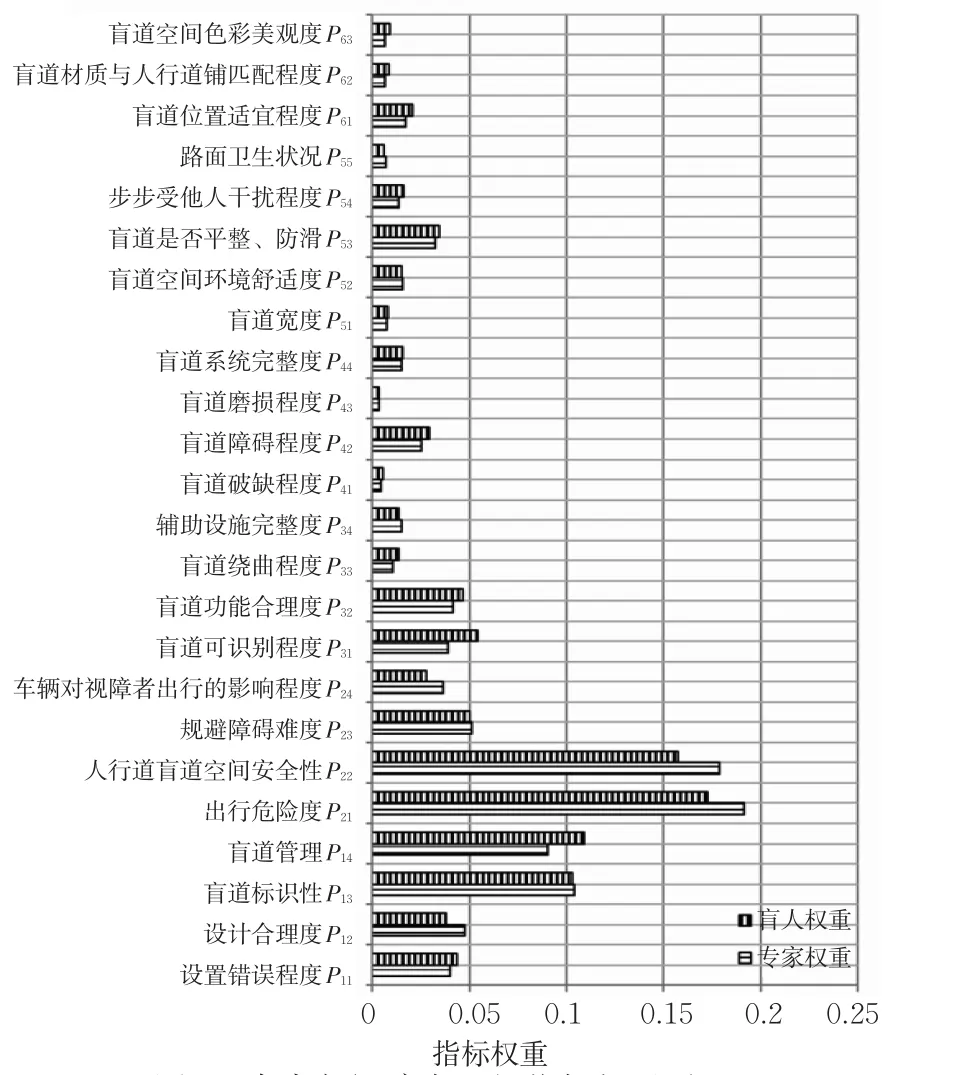
图5 专家与视障者二级指标权重对比Fig.5 Expert and blind secondary index weight contrast
在二级指标中,专家与视障者认为相对重要的为:“视障者出行危险程度”(0.1914/0.1726)、“人行道过街提示设施完善程度”(0.1790/0.1576)、“盲道管理”(0.0901/0.1089)、“盲道凸出条(点)规范程度”(0.1043/0.1032),二级指标评价结果对比分析见图5。其中,“视障者出行危险程度”和“人行盲道空间安全性”都属于“安全性”这一指标下,说明专家和视障者均认为盲道的安全性是最重要的影响因素。
3.4 最终组合权重
由于盲道空间环境属于道路步行空间的一部分,且视障者群体对盲道空间环境的感受在评价中具有重要地位,本研究分别对专家和视障者群体进行权重采样分析,以4:6的比例综合后作为评价权重依据。最终组合权重结果见表5。

表5 最终组合权重分布Tab.5 Distribution of final combined weights
从一级指标组内权重看出,盲道及相关无障碍设施(P13,P14)、视障者出行危险程度和辅助设施完善程度(P21,P22)、盲道的可辨识度和功能合理性(P31,P32)、盲道障碍程度和盲道基础设施完善程度(P42,P44)、盲道是否平整防滑(P53)、盲道位置适宜程度(P61)在6项一级指标中所占比重较大,说明对盲道而言该因素是影响其质量的重要部分。在城市道路步行空间盲道评价体系中盲道设置规范性、盲道空间步行安全性2项一级指标对盲道空间质量影响最大,其中盲道及相关无障碍设施(P13,P14)、视障者出行危险程度和辅助设施完善程度(P21,P22)的影响更是重中之重,组合权重分布见图6。

图6 最终一级指标内组合权重Fig.6 The final combination weight in the primary index
4 实例应用
为验证评价指标体系的全面性和合理性,采用本指标体系对南京某道路步行空间盲道进行评价。操作流程为:通过问卷访谈的方式对盲人做咨询,让他们对影响盲道空间的相关指标进行评价。本文针对所有盲道分别回收30份问卷。
该道路位于南京市老城区长约556 m,路宽17 m,道路剖面示意图见图7。此路段的道路断面分配为:车行道为3车道宽9 m(东侧车道用作临时停车位),分车绿带宽1.5 m,仅西侧设置非机动车道宽2 m,东侧人行道与行道树绿带混用约宽2.5 m,西侧人行道兼具非机动车道功能。地势具缓坡,道路步行空间相对独立但较为拥挤,盲道空间较破碎,见图8。

图7 样本道路剖面示意Fig.7 road profile

图8 树木挤占人行空间Fig.8 The trees make up the pedestrian space
4.1 根据评价指标体系,建立评价对象因素集如下。
4.2 建立评价集
本文将盲道空间质量评价等级划分为5个等级,即盲道空间质量好,盲道空间质量较好,盲道空间质量一般,盲道空间质量较差,盲道空间质量差。为了得到评价分值,将其分别量化为5,4,3,2,1。得到评价集为

为了便于结果查看,其定义语义标度见表6。
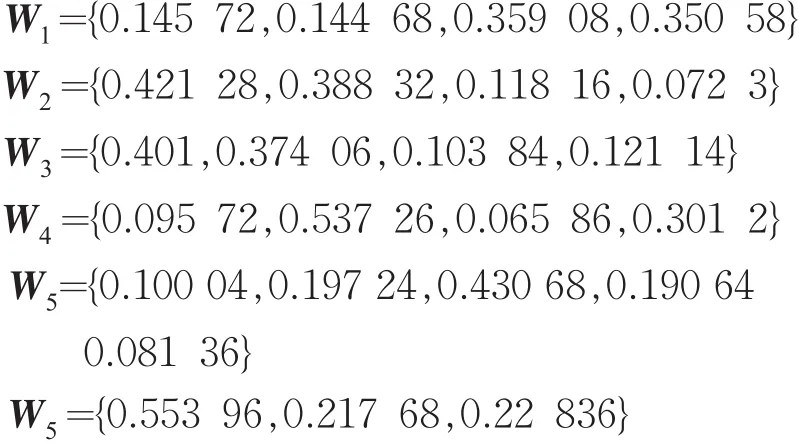
4.3 建立权重向量集W
通过层次分析法分别从专家与盲人角度求得相应指标权重,由于二者之间部分指标存在差异,所以采取求加权值的方式(专家:盲人=4:6)求得各指标综合权重向量,以保证结果的客观性,以下集合中向量已是加权后结果。


表6 评价集语义标度表Tab.6 semantic scale table of evaluation set
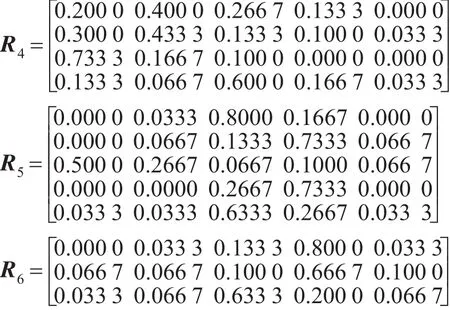
4.4 建立模糊评价矩阵Ri

式中,rij为第i个指标选择Vi等级的人数与评价总人数之比,j=1,2,3,…,n。盲人对影响盲道空间质量的二级指标选择情况见表7。
由表 7,可以得到各个模糊评价矩阵 R1,R2,R3,R4,R5,R6。


表7 盲人对影响盲道空间质量指标评定情况Tab.7 evaluation of spatial quality index of blind track by blind people
4.5 模糊矩阵复合运算E=W×R
根据最大隶属原则将最终综合评价向量映射到评判集V中即可得到相应各级指标及最终目标的评价结果。
4.5.1 二级指标对一级指标模糊矩阵复合运算

根据最大隶属度原则,可以发现该项整体质量评判隶属第4项,说明“规范性”评价较差。同理可以得到其他几项一级指标的评判结果如下。

由结果可知,该项质量评判隶属第4项,说明“安全性”评价较差。

由结果可知,该项质量评判隶属第3项,说明“可达性(便捷性)”评价一般。

由结果可知,该项质量评判隶属第2项,说明“连续性”评价较好。

由结果可知,该项质量评判隶属第4项,说明“舒适性”评价较差。

由结果可知,该项质量评判隶属第4项,说明“美观性”评价较差。
4.5.2 一级指标对总目标模糊矩阵复合运算
构造一级指标评判矩阵R
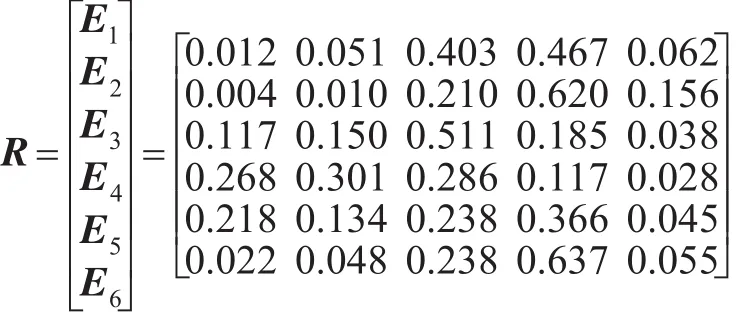
盲道空间质量综合评价结果为

由结果可见看出该盲道的空间质量评价结果为“较差”,通过量化评分,可得

该盲道的空间质量综合评分为2.486,对照语义标度表可见,评价结果为“较差”,二级指标结果分别为:“规范性”较差、“安全性”较差、“可达性”一般、“连续性”较好、“舒适性”较差、“美观性”较差。由于本案例处于老城区,盲道建设较早且并未及时维护,因此以现阶段的感受看其美观性和舒适性评价结果为较差符合实际情况;可达性和连续性结果优于其他二级指标,说明该道路步行空间盲道铺设量和线路都较合理;尽管如此,作为权重最大的规范性和安全性2个评价指标评价结果较差则是影响盲道质量最终评价结果的主要因素,后期盲道空间品质提升工程中这2项指标也是重要考虑因素。评价结果与视障者实际被试体验一致,说明本评价体系具备可操作性。
5 结束语
根据城市道路步行空间盲道参与方的不同分别从道路步行空间设计、视障者需求、盲道设置3个角度确立城市道路步行空间盲道评价的主要内容,使用层次分析原理,将评价要素分层及筛选,以构建能够全面反映城市道路步行空间盲道现状的三级指标体系。利用层次分析法,对盲道设置规范性、盲道空间步行安全性、使用盲道系统可达性、盲道系统连续性、盲道空间环境舒适性和美观性等6个准则层24个指标层,并对指标排序以确定各指标权重,评价结果能真实反映二级指标现状和盲道空间质量水平。本研究能实现对城市道路步行空间的合理评价,有利于实现不同区域不同等级道路步行空间盲道质量的对比,通过对比了解盲道质量的不足;科学的城市道路步行空间盲道评价有利于政府决策部门制定盲道空间改善对策,有利于市政建设与设计部门对城市道路步行空间盲道的建设和规划设计,有利于视障者群体对使用盲道体验的提升。
本研究指标选取到指标权重数据均来源于南京市与盲道系统相关的专家及视障者群体,对于其他地区本研究所述评价体系是一个完整的概念框架,若应用于实践还需对当地盲道系统相关参与者进行相关访谈、问卷和实地调查,后续研究中如若条件允许,课题组将借助AI技术,记录所评价道路周边环境,通过语音录入实时同步路况信息,让视障者群体在不实地体验现场环境的时候能够做出真实评价,可有效减少评价操作难度,同时也将有助于提升样本量。同时未来可吸收AHP-熵复合物元城市交通可持续发展评价模型[17]建立诸如AHP-DEA模型[18]、AHP-熵权法[18]等基于AHP法改进的组合评价模型构建更加科学合理的评价体系,以满足评价指标中主观评价和客观实测数据等不同来源数据的准确性需要。
