引信火箭橇试验技术研究
2020-06-16薛正国林嘉轩童广德
薛正国, 林嘉轩, 张 元, 童广德, 谢 兵
(电磁散射重点实验室,上海200438)
0 引言
近炸引信通过感知并识别目标信息(或按装订的指令信息),在期望的时空引爆弹药,实现目标最佳的毁伤效能。近炸引信的基本特征之一是在弹目交会的不同姿态下工作,工作时间极短(毫秒级),其主要性能大多需在动态过程中测定[1]。
引信动态仿真试验是模拟实战时弹体与目标交会过程的一种试验方法,用于对引信的作用距离、截止距离、盲区性能、启动特性和抗干扰性能等核心指标进行检测或者验证。目前常用的动态仿真试验方法有低速滑轨试验、柔性滑轨试验和高速火箭橇试验[2]。低速滑轨试验交会速度慢,需要调低引信的多普勒通频带范围;柔性滑轨试验存在严重的地面反射干扰问题,使用频率较低;火箭橇试验能模拟较为逼真的弹目高速交会过程,获得的引信启动特性等信息比较可靠,而且空间交会姿态和相对速度可以控制。美国自20世纪60年代就开始将火箭橇试验用于模拟弹目交会过程的引信试验,我国则在近十年前开始将火箭橇试验大量用于引信动态交会模拟试验,并在引信的研制中发挥了巨大的作用。
1 火箭橇试验概述
火箭橇试验是20世纪下半叶发展起来的一种试验方法,主要利用大型高精度地面动态模拟试验设备,研究航空、航天等国防武器装备以及民用高新技术产品在高速度、高加速度运行过程中所遇到的一系列技术问题。试验时,用火箭发动机作动力,推动装载试验件的滑橇沿滑轨高速运行,模拟试验件在空中的运行状态,并通过光、电等测试手段对试验件进行测试。火箭橇试验广泛应用于导弹惯导和控制系统、引信、飞行员弹射救生、空气动力、降落伞、航空生理、推进等系统高速运动状态下的性能验证。
美国在应用火箭橇对武器装备进行试验研究方面起步最早、发展最快。据不完全统计,1960年至今,仅霍洛曼火箭橇试验基地就进行了500余次试验。在承担洲际战略武器、战术武器、载人空天飞行器、运载火箭等试验的基础上,该试验基地还承担了飞机、舰船等的导航设备试验。图1为美国霍洛曼高速试验轨道[3]。
中国的火箭橇试验设施建设起步较晚,1993年6月在湖北襄樊建成了国内第一条,也是当时亚洲唯一的火箭橇滑轨[4],结束了我国多年来一直借用普通铁路支线做高速地面模拟试验的历史[5]。中国襄北火箭橇试验轨道如图2所示。此后,西安、四川、安徽等基地陆续建设了多条火箭橇试验轨道。

图2 中国襄北火箭橇试验轨道
安徽广德试验场的火箭橇高速弹目交会试验,在不改变引信状态的前提下,利用多枚火箭推动火箭橇载车,使弹目交会速度达到真实速度范围,可以真实模拟空中弹目交会状态,验证引信的启动特性和启动区。目前安徽广德试验场已具备成熟可靠的引信火箭橇试验和数据处理能力,并建立了完备的火箭橇试验安全操作流程。火箭橇试验的开展可减少引信靶场试验和绕飞试验次数,推动近炸引信试验技术的发展。
2 火箭橇力学分析
火箭橇载车在火箭发动机的推动下在滑轨上加速运动时[6],主要受火箭发动机推力F、空气阻力Ra、摩擦力Rf和刹车阶段水刹阻力fw等作用,如图3所示。图中:火箭橇载车质量为m1;火箭发动机质量为m2,其在加速段随推进火箭药柱燃烧而减小;刹车阶段戽斗所受水的阻力为fw;加速段火箭推力作用线到轨面的垂直距离为yt;yG为载车质心到轨面垂直距离,适用于全弹道[7]。
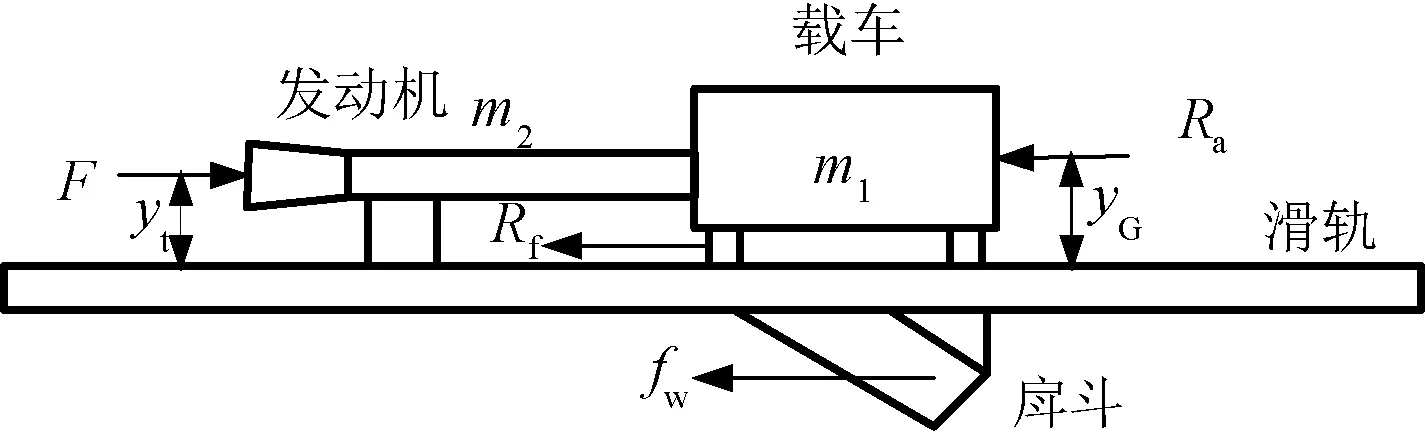
图3 火箭橇试验系统受力示意图
根据牛顿第二运动定律,火箭橇在加速段的运动方程为

式中:a为火箭橇加速度。其中,火箭推力F由火箭参数获得。
气动阻力Ra根据空气动力学的阻力公式得到,表达式为

式中:ρ为空气密度;A为迎风面积;CD为空气阻力系数;v为运动速度。令ρACD/2=K',则有

因为在亚音速范围内,CD近似为常数,所以K'可以视为常数。按照具体试验方案,分别计算各零部件的迎风面积,并选择不同CD,求出K'的值,即可得到Ra随v的变化曲线。
火箭橇的气动阻力主要由试验件气动阻力、车体气动阻力和水刹车斗气动阻力三部分构成。对照同类桁架系列滑车的气动阻力特征,初步确定该火箭橇的气动阻力特征数据,试验件、车体和水刹车斗的迎风面积分别为0.069,0.225,0.152 m2。
滑动摩擦阻力的表达式为

式中:μf是摩擦系数;Q是火箭橇总重量。μf不仅与滑靴的材料和导轨粗糙度有关,而且与滑动速度关系很大。根据美国海军军械试验站的试验结果:假设火箭橇速度为v,当0≤v≤30 m/s时,由于运动距离很短,滑动摩擦阻力可不考虑;而当v>30m/s时,需考虑滑动摩擦阻力,μf的取值范围为0.11~0.16,通常μf取0.16。
3 火箭橇弹道设计
火箭橇试验系统的火箭橇运动弹道分为三部分:第一部分为加速段,载车在火箭发动机推力作用下,加速到所需的速度;第二部分为滑行段,火箭停止工作后,载车在空气阻力及摩擦阻力作用下减速滑行;第三部分为刹车段,载车在水刹车装置作用下制动。
(1)加速段
加速段,滑车在运动方向上主要受三个力:火箭推力F、空气阻力Ra和轨道摩擦阻力Rf。滑车的运动方程见式(1)。对时间进行离散化处理后,得到ti时刻的各运动参量计算公式为
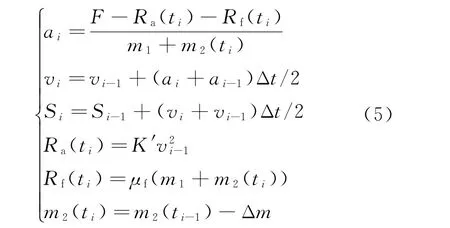
式中:ai为加速度;Δt为时间间隔;vi为载车速度;Si为载车运行距离;Δm为Δt时间内火箭燃烧减少的质量。
(2)滑行段
滑行段从火箭熄火到水刹启动位置,可视为匀减速段,载车只受空气阻力和摩擦阻力作用,满足

(3)刹车段
采用水刹车装置,刹车段运动方程为

式中:K为水阻力系数,一般为0.3~0.5;AB为刹车戽斗浸入水中的截面积。
通过以上数据和公式,进行数值仿真即可得到火箭橇的运行弹道数据,也可根据弹道要求计算所需的火箭推力和水刹车吃水深度。
4 引信火箭橇试验
4.1 试验方法
模拟引信和目标在空中的高速交会状态,按规定的试验弹道脱靶条件,将引信放置在火箭橇载车上,目标悬挂于轨道上方。为了考核引信多目标情况下的启动特性,在轨道上方利用塔吊吊挂多个目标,以三个目标为例,火箭橇弹目交会试验示意图如图5所示。为了能区分不同的目标回波,目标1和目标2之间保持一定的垂直距离l,目标2和目标3之间保持一定的水平距离L。被试引信固定在火箭橇上,沿滑轨从目标下方高速通过,此时引信天线波瓣依次扫过目标,得到引信的目标探测信息。通过模拟不同弹道时导弹与目标的高速交会状态,基于大量数据统计获取引信的启动特性和启动区。试验时,一般利用数据采集仪记录引信的回波、检波、报警等信号,以及载车的位标信号和火箭橇的加速度信号。同时对交会段进行高速摄像,获取交会影像信息,其中载车位标信号用于载车的位置标定。
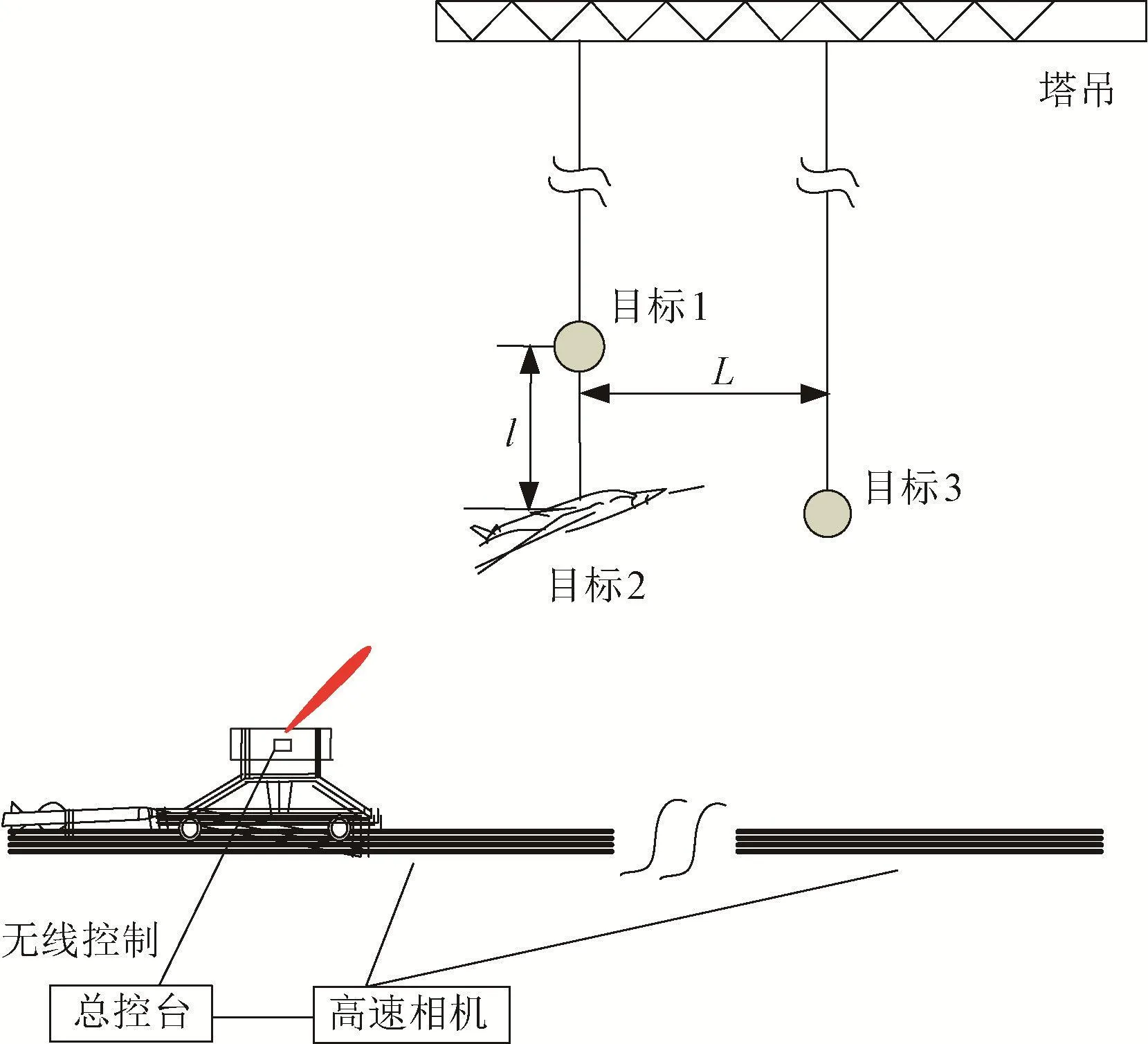
图5 火箭橇弹目交会试验示意图
开展火箭橇试验应满足一定的要求:
a)在滑行的加速段和减速段,被试产品的过载和振动值应低于该产品使用环境条件要求的指标;
b)对多普勒体制的无线电引信,工作段内的速度应使试验产生的信号多普勒频率高于引信多普勒放大器通带的设计下限。
4.2 试验系统
火箭橇试验系统由高速火箭橇及其高精度承载轨道装置、目标吊挂及姿态控制装置、信号采集与数据处理装置、全尺寸目标模型四大系统组成。
高速火箭橇及其高精度承载轨道装置主要包括火箭橇、高精度轨道、位置标定和引信姿态控制设备。
目标吊挂设备一般为塔吊,采用低散射尼龙绳吊挂目标;目标的姿态可通过安装在目标内部的三维姿态测量设备或地面辅助测量设备测量,目标的高度通过激光全站仪测量。
信号采集与数据处理装置由信号采集器,信号传输设备和信号处理设备等组成。信号采集器固定在火箭橇平台上,引信输出信号、振动信号、位标信号等经信号采集器采集后由控制计算机进行远程控制和数据传输,经过数据处理后得出引信的启动特征数据。
4.3 试验结果
试验采用三枚火箭助推,全尺寸目标模型为两个标准金属球和一个长形弹体。火箭橇车运动的速度、加速度及位移仿真和试验结果如图6所示。测试数据曲线与理论计算仿真曲线对比,加速段及滑行段部分较为吻合,表明该高速交会试验为引信试验提供了有效的弹道。
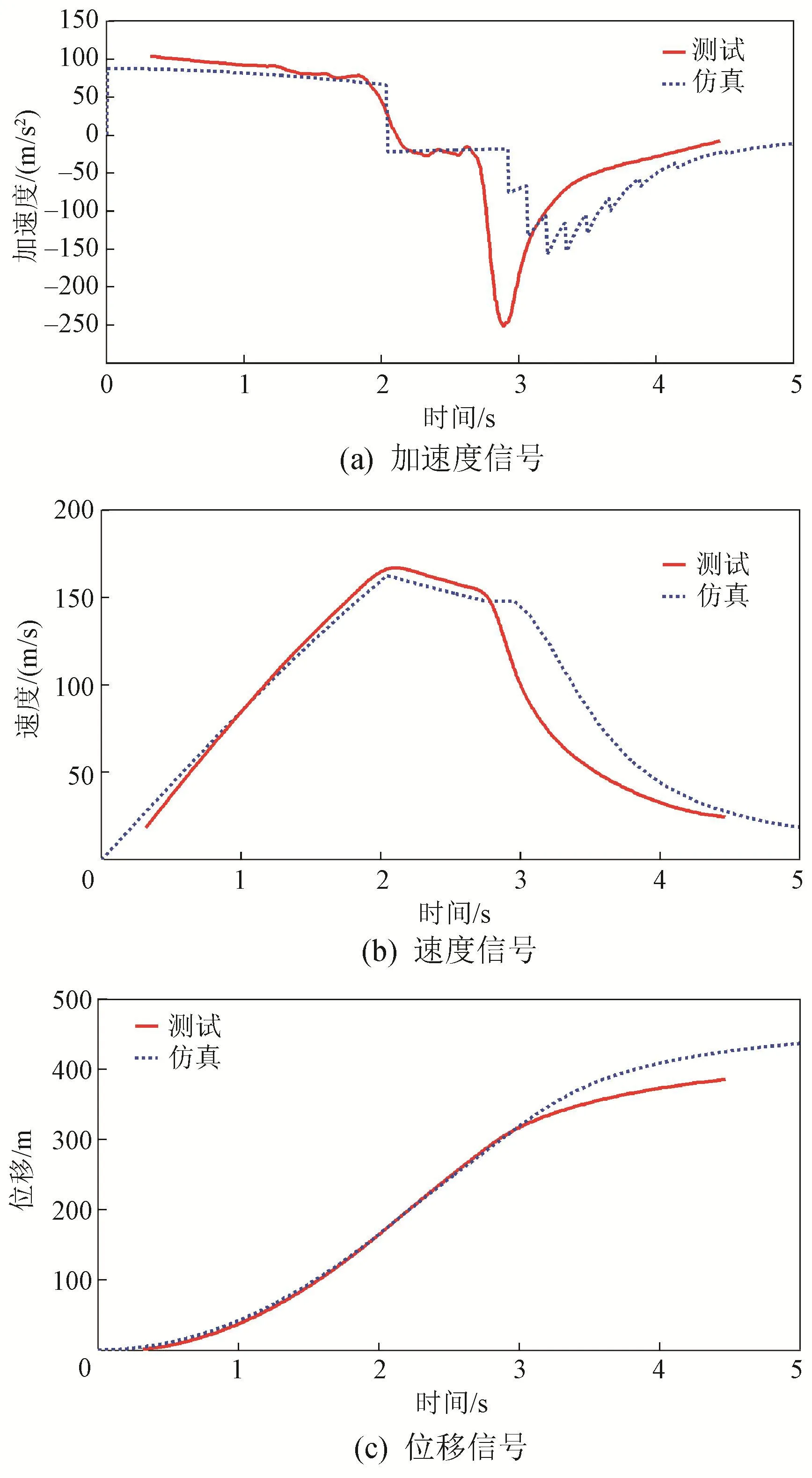
图6 火箭橇弹道仿真与试验结果对比
近炸引信火箭橇试验所取得的目标的多普勒回波信号如图7所示。试验模拟的相对弹目交会速度超过150 m/s,处于真实的引信多普勒通带范围内,获取了引信对真实目标的探测信息,为分析引信的启动特性及启动区提供了可靠的试验数据。

图7 目标多普勒回波信号示意图
5 结论
本文对引信火箭橇试验技术开展研究,实现了火箭橇弹道设计、仿真和验证的闭环,并在近炸引信试验中得到应用,为导弹引信关键指标的验证提供了更有效的试验手段,可以大大减少实弹靶试次数,节约研制经费,缩短研制周期。
